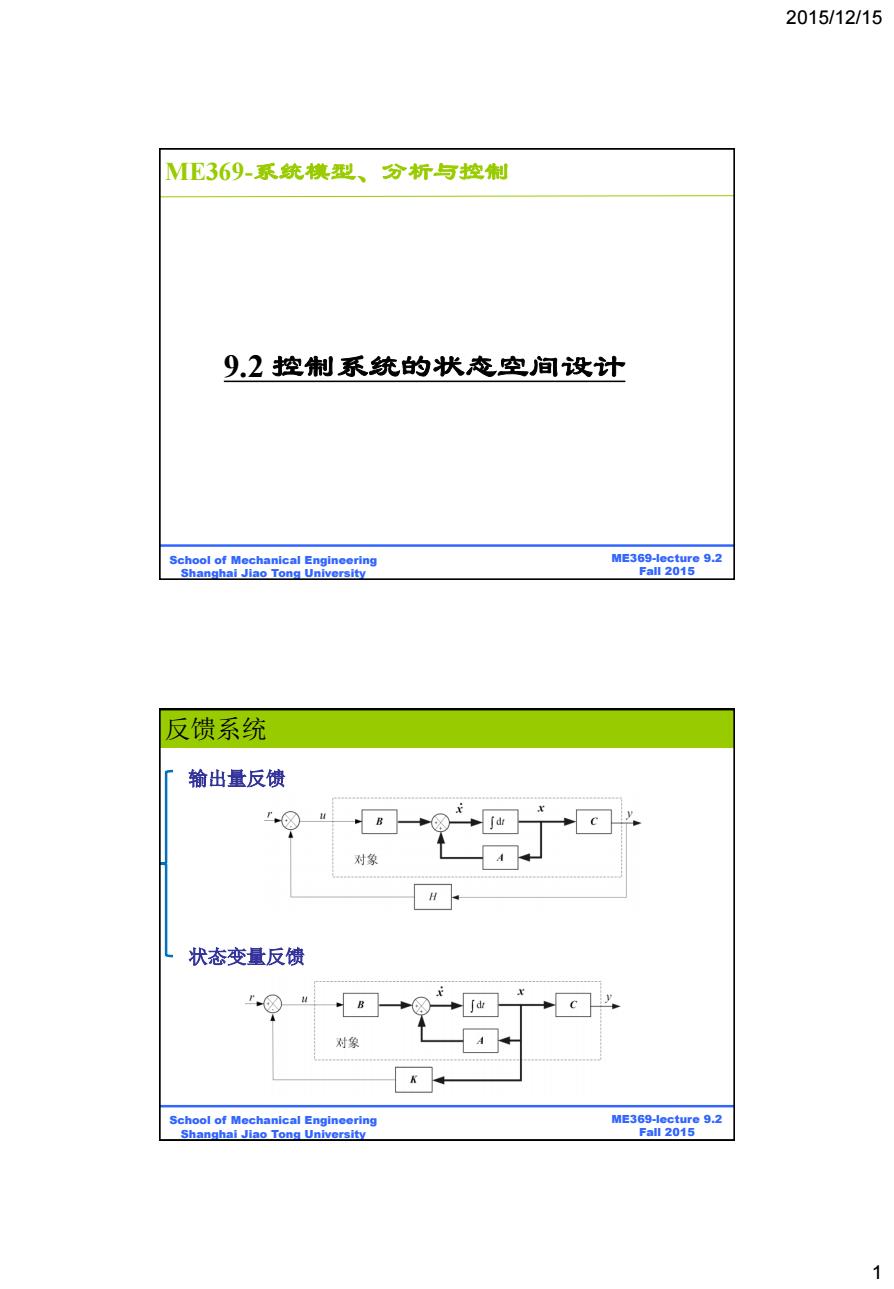
2015/12/15 ME369-系统模型、分析与控制 9.2控制系统的状态空间设计 School of Mechanical Engineering ME369-lecture 9.2 Shanghai Jiao Tong University Fal12015 反馈系统 输出量反馈 对象 状态变量反馈 B 对象 School of Mechanical Engineering ME369-lecture 9.2 Shanghai Jiao Tong University Fall 2015 1
2015/12/15 1 ME369-lecture 9.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 9.2 控制系统的状态空间设计 ME369-系统模型、分析与控制 ME369-lecture 9.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 反馈系统 状态变量反馈 输出量反馈
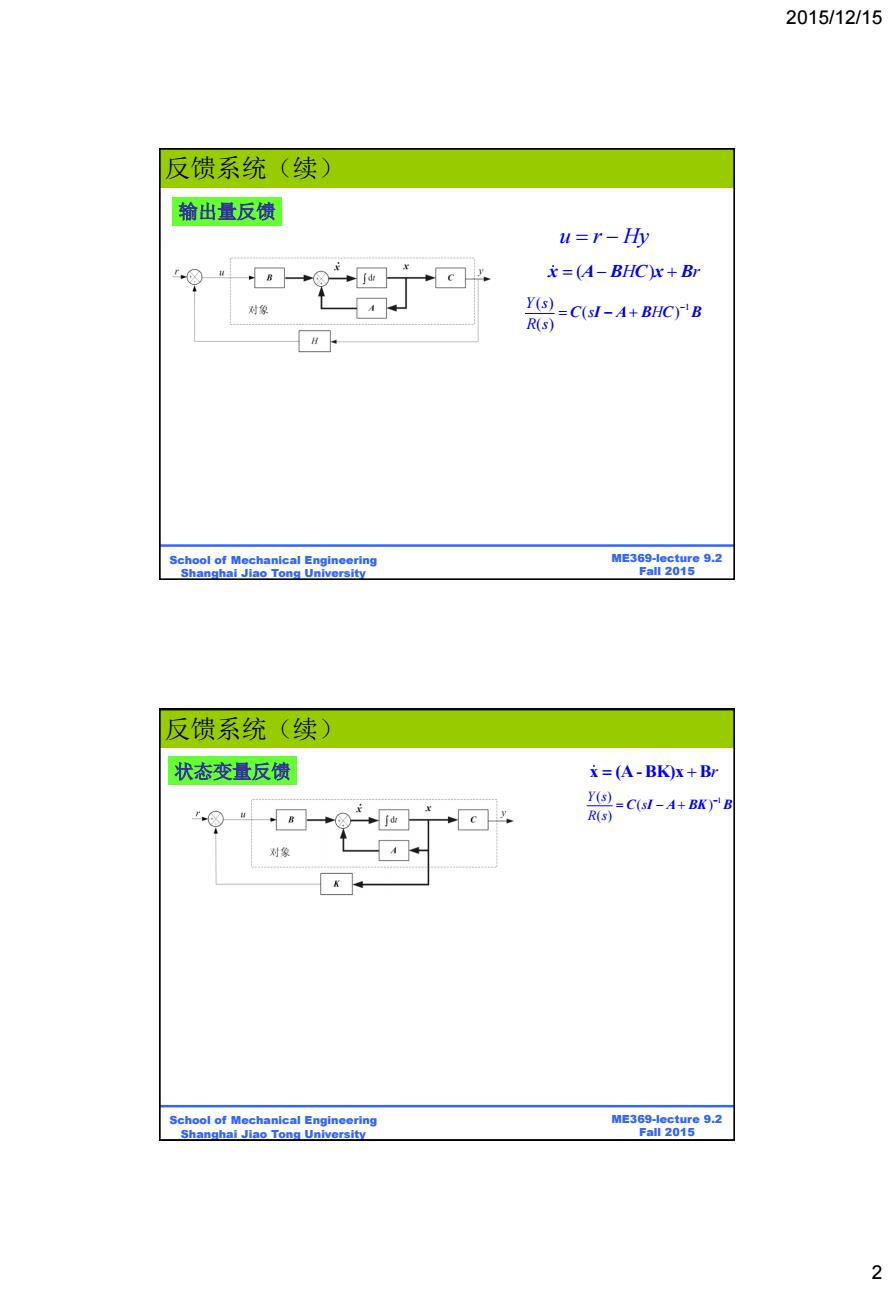
2015/12/15 反馈系统(续) 输出量反馈 u=r-Hy 文=(A-BHC)x+B 对象 Y(s)=C(sI-A+BHC)B R(s) H School of Mechanical Engineering ME369-lecture 9.2 Shanghai Jiao Tong University Fall 2015 反馈系统(续) 状态变量反馈 =(A-BK)x+Br Y(s)-C(sI-A+BK)B R(s) 对象 School of Mechanical Engineering ME369-lecture 9.2 Shanghai Jiao Tong University Fall 2015 2
2015/12/15 2 ME369-lecture 9.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 反馈系统(续) u r Hy x A B C x B ( ) H r1 ( ) ( ) ( ) Y s s H R s C I A B C B 输出量反馈 ME369-lecture 9.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 反馈系统(续) x (A - BK)x B r 1 ( ) ( ) ( ) Y s s R s C I A BK B 状态变量反馈
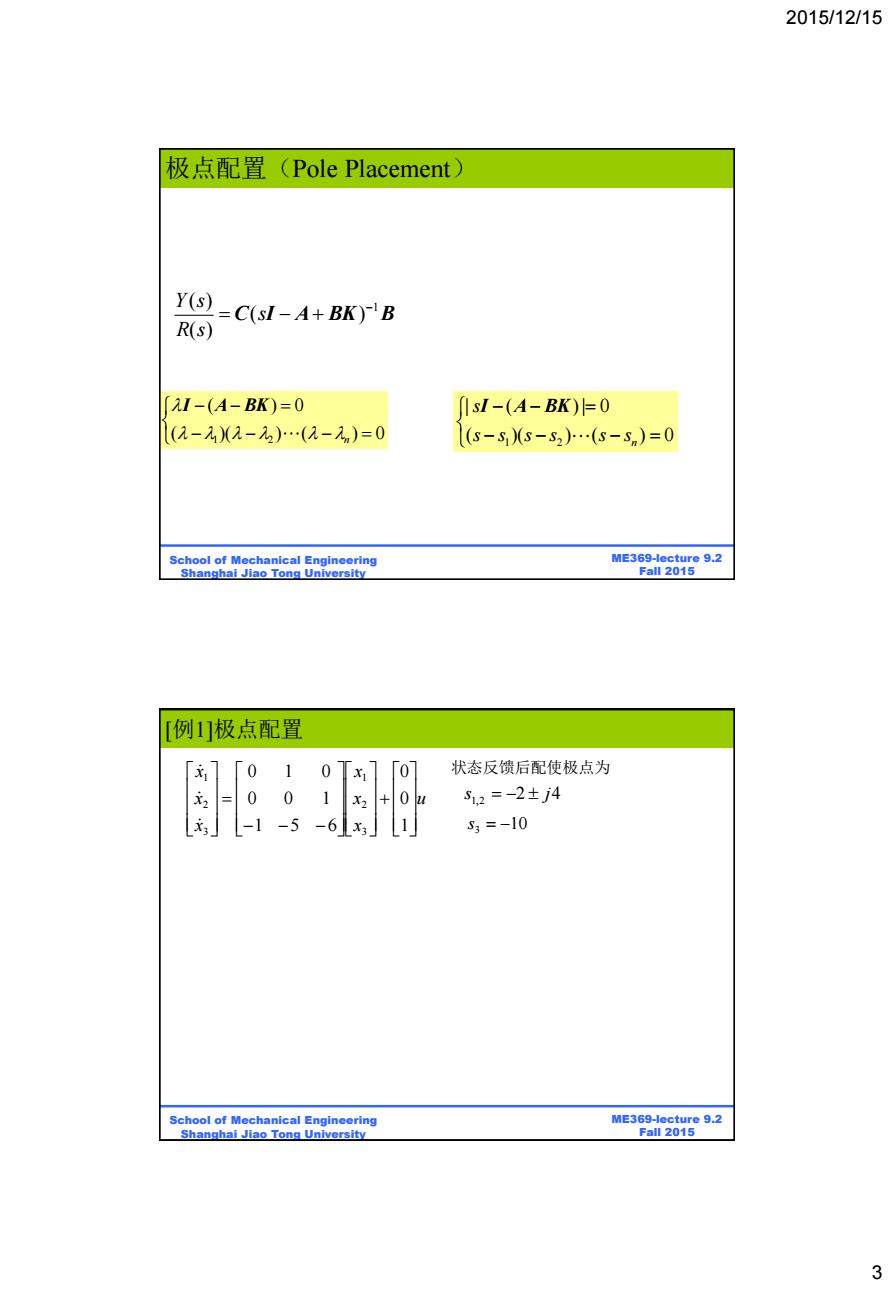
2015/12/15 极点配置(Pole Placement) Y(s)=C(sI-A+BK)B R(s) 1I-(A-BK=0 sI-(A-BK)=0 (2-)2-2)…(2-)=0 (s-S)s-S2)…(s-Sn)=0 School of Mechanical Engineering ME369-lecture 9.2 Shanghai Jiao Tong University Fall 2015 例1]极点配置 0 1 0 X 0 状态反馈后配使极点为 0 0 + 0 2=-2±j4 -5 -6Lx1 S3=-10 School of Mechanical Engineering ME369-lecture 9.2 Shanghai Jiao Tong University Fall 2015 3
2015/12/15 3 ME369-lecture 9.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 极点配置(Pole Placement) 1 2 ( ) 0 ( )( ) ( ) 0 n I A BK 1 ( ) ( ) ( ) Y s s R s C I A BK B 1 2 | ( ) | 0 ( )( ) ( ) 0 n s s s s s s s I A BK ME369-lecture 9.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University u x x x x x x 1 0 0 1 5 6 0 0 1 0 1 0 3 2 1 3 2 1 s1,2 2 j4 s3 10 状态反馈后配使极点为 [例1]极点配置
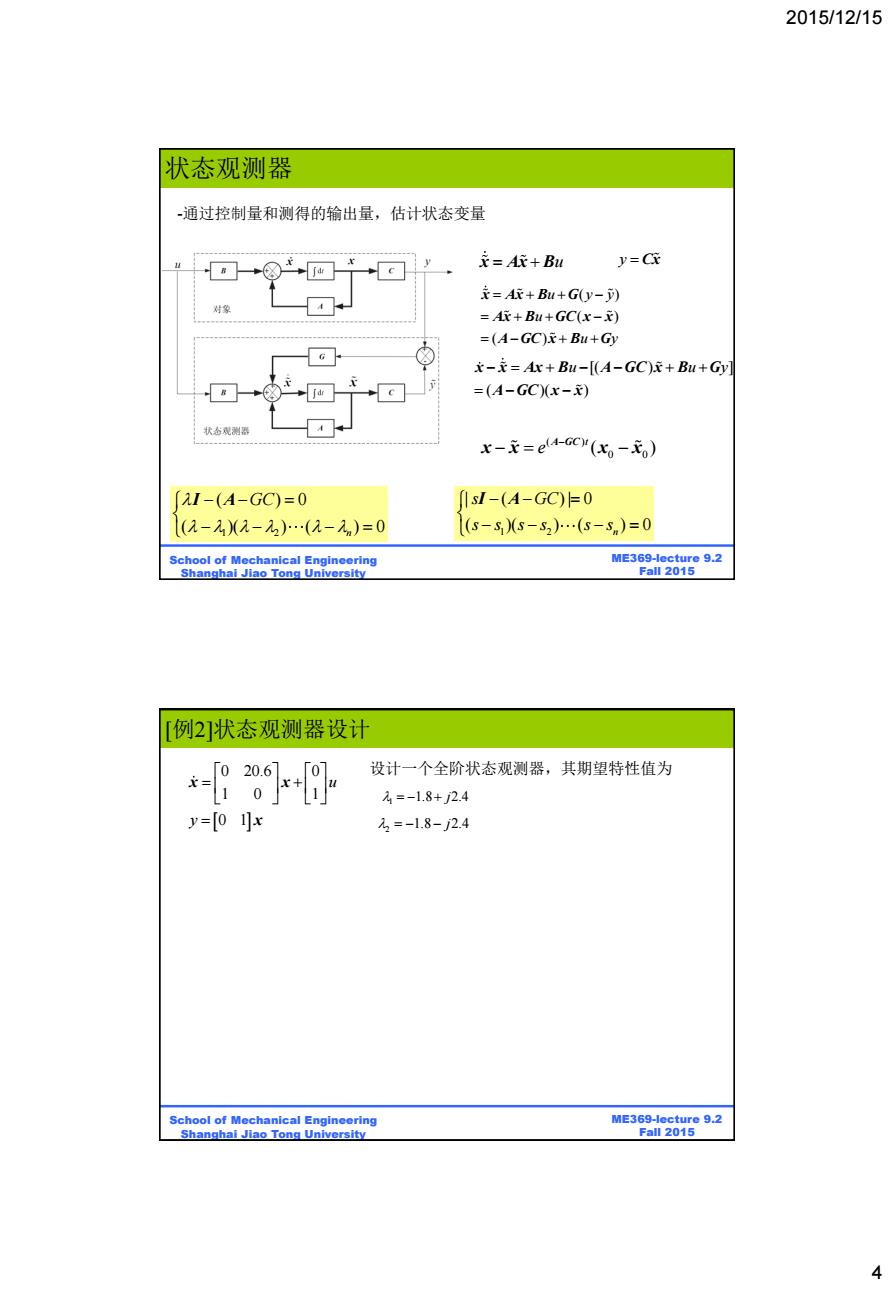
2015/12/15 状态观测器 通过控制量和测得的输出量,估计状态变量 元=A+Bu y=C =A+Bu+G(y-j) 对象 =A+Bu+GC(x-) =(A-GC)元+Bu+Gy G 文-元=Ar+Bu-[(A-GC)R+B+Gy B+③ jd山 =(A-GC)x-) 状态观测器 x-=e4cr(x-元) 「I-(A-GC)=0 sI-(A-GC)0 (2-2)2-22)…(2-1n)=0 (s-5s-52)…(s-sn)=0 School of Mechanical Engineering ME369-lecture 9.2 Shanghai Jiao Tong University Fall 2015 例2]状态观测器设计 -3 设计一个全阶状态观测器,其期望特性值为 =-1.8+j2.4 y=[0x 元2=-1.8-j2.4 School of Mechanical Engineering ME369-lecture 9.2 Shanghai Jiao Tong University Fall 2015 4
2015/12/15 4 ME369-lecture 9.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 状态观测器 -通过控制量和测得的输出量,估计状态变量 x Ax B u y Cx ( ) ( ) ( ) u y y u u y x Ax B G Ax B GC x x A GC x B G [( ) ] ( )( ) u u y x x Ax B A GC x B G A GC x x ( ) 0 0 ( ) t e A GC x x x x 1 2 ( ) 0 ( )( ) ( ) 0 n GC I A 1 2 | ( ) | 0 ( )( ) ( ) 0 n s GC s s s s s s I A ME369-lecture 9.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 0 20.6 0 1 0 1 0 1 u y x x x 设计一个全阶状态观测器,其期望特性值为 1 1.8 2.4 j 2 1.8 2.4 j [例2]状态观测器设计
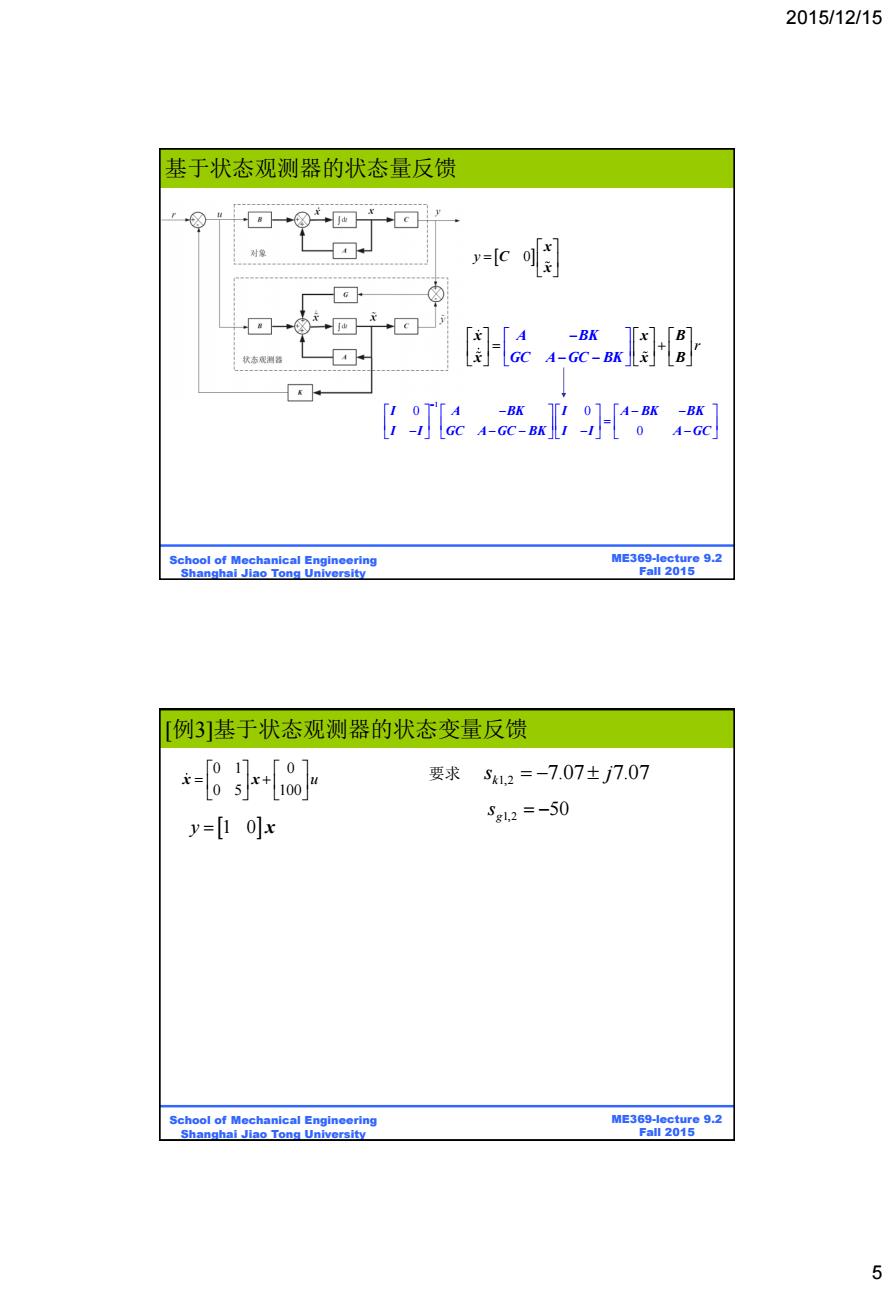
2015/12/15 基于状态观测器的状态量反馈 对象 状方观料法 T-ce School of Mechanical Engineering ME369-lecture 9.2 Shanghai Jiao Tong University Fall 2015 例3]基于状态观测器的状态变量反馈 b 要求 5k1,2=-7.07±7.07 y=[0]x 5g2=-50 School of Mechanical Engineering ME369-lecture 9.2 Shanghai Jiao Tong University Fall 2015 5
2015/12/15 5 ME369-lecture 9.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 基于状态观测器的状态量反馈 r x x B x A BK GC A GC BK x B y 0 x C x 1 0 0 0 I A BK I A BK BK I I GC A GC BK I I A GC ME369-lecture 9.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 0 1 0 0 5 100 u x x y 1 0 x 要求 sk1,2 7.07 j7.07 sg1,2 50 [例3]基于状态观测器的状态变量反馈