
2015/12/1 ME369-系统模型、分析与控制 8.2PD校正 School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fall 2015 PID控制器 Disturbance Controller D(s) Reference Control Plant Input Error Gc(s) Input Output Gp(s) R(s) -E(s) U(s) Y(s) H(s) 比例(P)+积分(I)+微分(D) 时 :(-Ke()+Ke(dr+Kp). 频域: UG)-KKE() Gc(s) [Ko=Kc Ge()-Ke De 9 Nc(s)Kps2+Kps+KLKp(s+)s+) Kp=Kc(白+) 5 K1=Ko2 School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fall 2015 1
2015/12/1 1 BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 8.2 PID 校正 ME369-系统模型、分析与控制 BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University PID 控制器 比例(P)+ 积分(I)+ 微分(D) 时域: 频域:
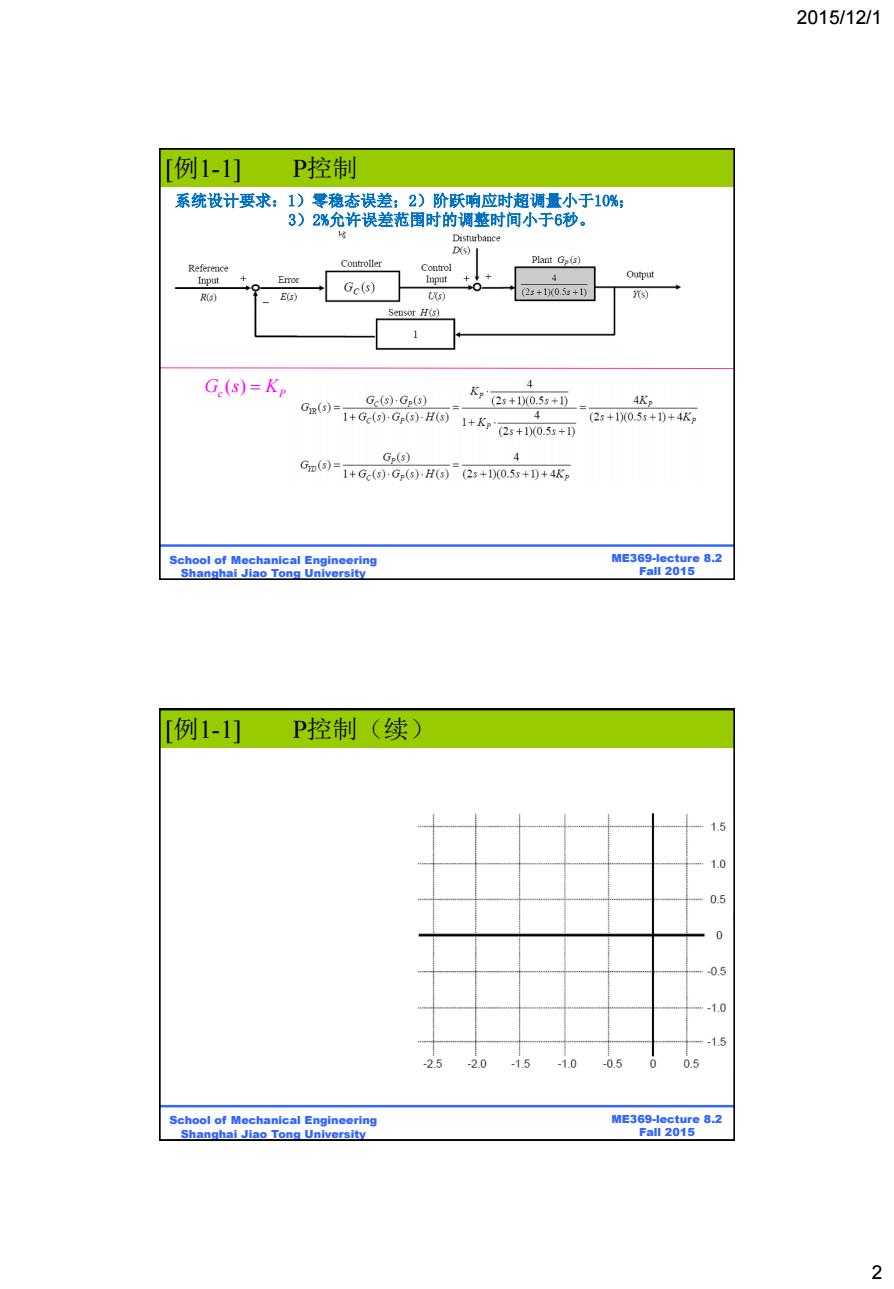
2015/12/1 例1-1] P控制 系统设计要求:1)零稳态误差;2)阶跃响应时超调量小于10%: 3)2%允许误差范围时的调整时间小于6秒。 Disturbance Ds) Reference Coutroller Plant Gp(s) Control Input + Error Input 4 Output Gc(s) R E(s) Us) (2s+100.5+1) Sensor H(s) G(s)=Kp 4 G(s).Gp(s) Kr+1X(0.5s+1) 4Kp Gp(3) 1+G.-Gr0-H阿1+K,2s+D0.5+D (2s+100.55+1)+4Kp Gp(s) 4 Gm⊙=1+Gc-G,(9-H©(2s+0.5+0+4K, School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fall 2015 例1-11 P控制(续) 1.5 1.0 05 0 0.5 -1.0 -15 -2.5 -2.0-15-1.0-0.5 0.5 School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fall 2015 2
2015/12/1 2 BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University [例1-1] P控制 系统设计要求:1)零稳态误差;2)阶跃响应时超调量小于10%; 3)2%允许误差范围时的调整时间小于6秒。 ( ) G s K c P BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University [例1-1] P控制(续)

2015/12/1 T例1-11 P控制(续) 设定量单位阶跃(D(s)=O) 扰动量单位输入(R(s)=O) Step Response Step Response K2=0.1 K=5 0.8 K。=0.5 K。=0.5 0.6 K。=1 0.4 K。=0.1 K。=2 0.2 K。=5 234567891 2 3 456 7 89 10 Time(sec) Time (sec) School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fall 2015 例1-2] PI控制 系统设计要求:1)零稳态误差;2)阶跃响应时超调量小于10%; 3)2%允许误差范围时的调整时间小于6秒。 Disturbance D(s)I Reference Comt山oller Control Plant Ge(s) Input Input+ 4 Output R(s) E(s) Gc(s) Us) (2s+1D(0.5x+1) s Sensor H(s) 1 1 G.(s)=Kp+K Kps+K Kos+KI 4 G(s)G(s) (25+1(0.55+1) 4(Kp3+K) G(5)= 1+G(s)G(3)H(s) 1+8+K 4 5(25+1(0.55+1)+4K-+K,) (25+10(0.55+1) G(s)= G(s) +Gc(s)-Gp(s)H(s)s(2s+10(0.5s+1)+4(Kps+,) School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fall 2015 3
2015/12/1 3 BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 设定量单位阶跃(D(s)=0) 扰动量单位输入(R(s)=0) [例1-1] P控制(续) BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University [例1-2] PI控制 系统设计要求:1)零稳态误差;2)阶跃响应时超调量小于10%; 3)2%允许误差范围时的调整时间小于6秒。 I 1 ( ) K P I c P K s K G s K s s
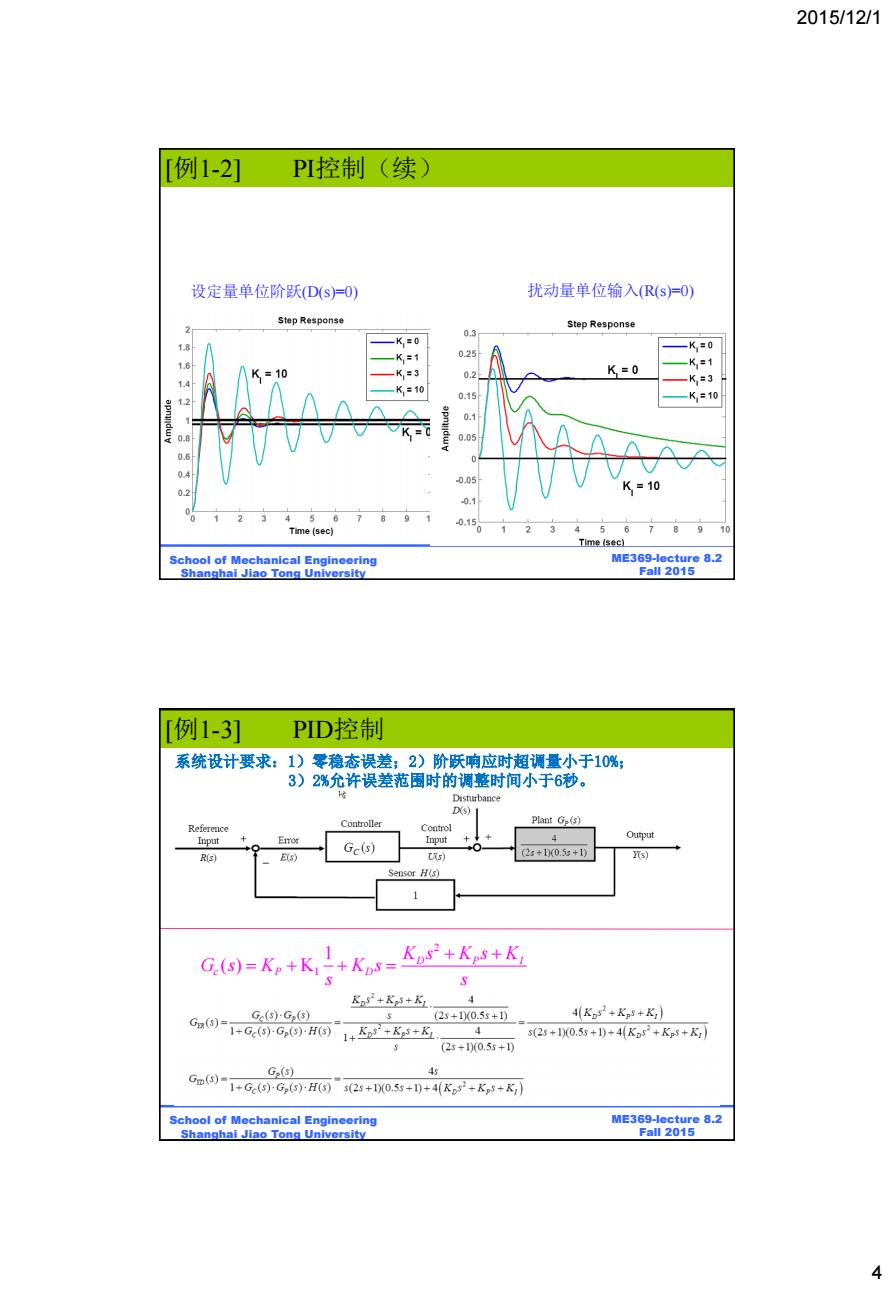
2015/12/1 T例1-21 PI控制(续) 设定量单位阶跃(D(s)=O) 扰动量单位输入(R(s)=O) Step Response Step Response 1.8 K=0 03 -K=0 K,=1 025 K=1 K=10 K=3 02 K=0 1.4 K,=3 K=10 12 K=10 0.8 0.6 0.05 0.2 K=10 0.1 015。 Time (sec) 5 6 Time (sec) School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fal12015 例1-3] PID控制 系统设计要求:1)零稳态误差;2)阶跃响应时超调量小于10%; 3)2%允许误差范围时的调整时间小于6秒。 Disturbance D(s) Reference Comt山oller Control Plant Ge(s) Input Input 4 Output E(s) Gc(s) R(s) Us) (2s+10(0.5x+1) s Sensor H(s) 1 G(s)=Kp+K-+Kps= Kos2+Kps+K Kos+Ks+K1 4 Ge(s)-G(s) (2s+1)(0.5s+1) 4K2+Kn+K) G(S)= 1+Ce(6)G,(H⑤1++K5+&. 4 s(23+100.5s+1)+4Ks2+K3+K,) (25+100.55+1) G.(s) 4 6m0)1+G.)-G,9-HOs2s+X0.5s+)+4Ko+K,5+) School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fall 2015 4
2015/12/1 4 BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 设定量单位阶跃(D(s)=0) 扰动量单位输入(R(s)=0) [例1-2] PI控制(续) BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University PID controller [例1-3] PID—控制example--PID 系统设计要求:1)零稳态误差;2)阶跃响应时超调量小于10%; 3)2%允许误差范围时的调整时间小于6秒。 2 I 1 ( ) K D P I c P D K s K s K G s K K s s s
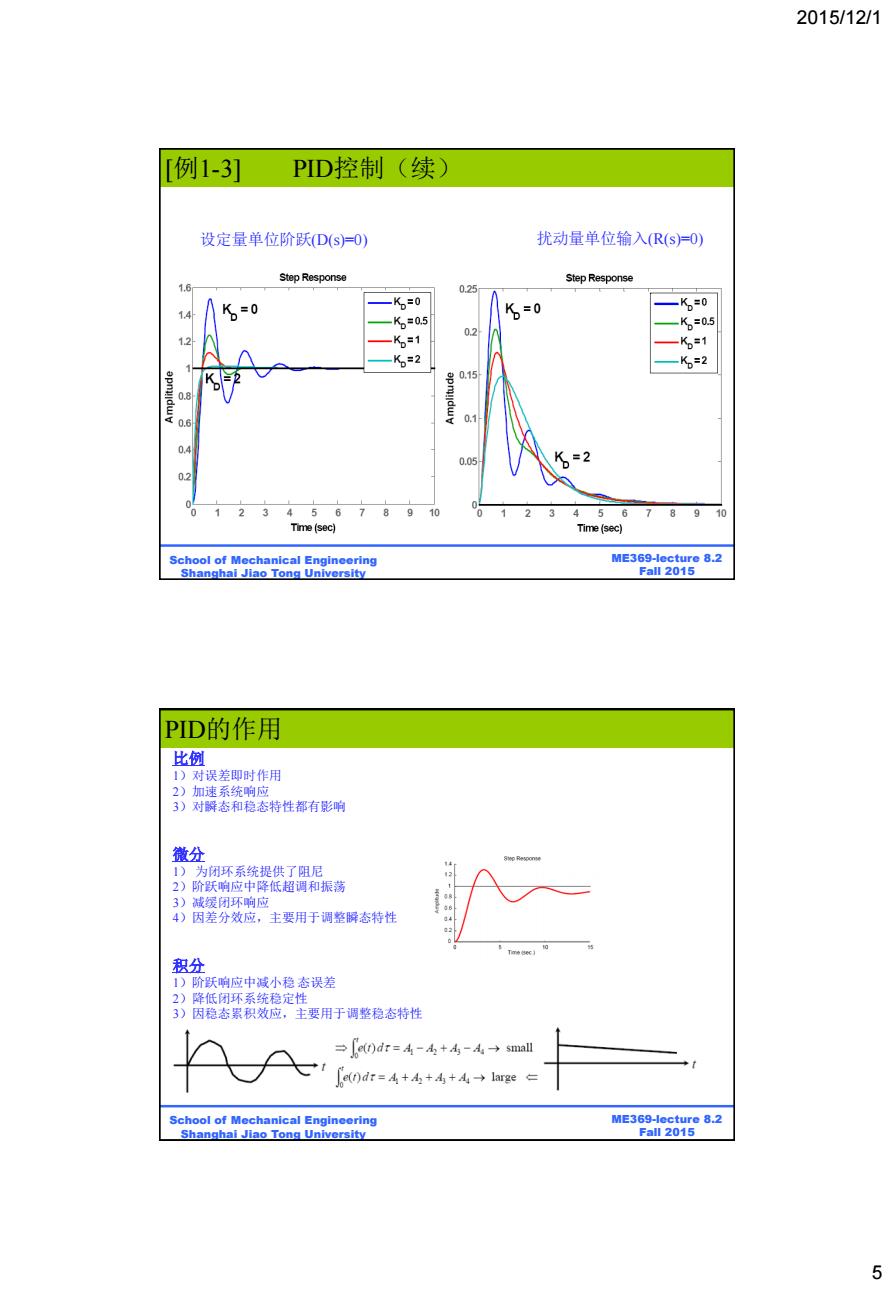
2015/12/1 T例1-3] PID控制(续) 设定量单位阶跃(D(s)=O) 扰动量单位输入(R(s)=O) Step Response Step Response 1.6 0.25 K=0 =0 0 K=0 K=0.5 K=0.5 0.2 12 X=1 K=2 K=2 0.15 0.6 0.4 0.05 K=2 0.2 0 123456 7 4 6 1 8 910 Time(sec) Time (sec) School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fal12015 PID的作用 比例 」)对误差即时作用 2)加速系统响应 3)对瞬态和稳态特性都有影响 徽分 1)为闭环系统提供了阻尼 2)阶跃响应中降低超调和振荡 3)减缓闭环响应 4)因差分效应,主要用于调整瞬态特性 积分 1)阶跃响应中减小稳态误差 2)降低闭环系统稳定性 3)因稳态累积效应,主要用于调整稳态特性 台e0dr=4-4+4-A→smal e0dr=4+4+4+4→large School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fall 2015 5
2015/12/1 5 BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University [例1-3] PID控制(续) 设定量单位阶跃(D(s)=0) 扰动量单位输入(R(s)=0) BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University PID的作用 比例 1)对误差即时作用 2)加速系统响应 3)对瞬态和稳态特性都有影响 微分 1) 为闭环系统提供了阻尼 2)阶跃响应中降低超调和振荡 3)减缓闭环响应 4)因差分效应,主要用于调整瞬态特性 积分 1)阶跃响应中减小稳 态误差 2)降低闭环系统稳定性 3)因稳态累积效应,主要用于调整稳态特性