ME369-系统模型、分析与控制 8.1控制系统设计概述 School of Mechanical Engineering ME369-lecture 8.1 Shanghai Jiao Tong University Fall 2015 “控制系统设计”? 控制系统组成元件 0)控制对象 1)执行元件 2)测量元件 3)给定元件 4)放大元件 设定性能 5)比较元件 6)控制器 7)校正元件(补偿器) School of Mechanical Engineering ME369-lecture 8.1 Shanghai Jiao Tong University Fall 2015 1
1 ME369-lecture 8.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 8.1 控制系统设计概述 ME369-系统模型、分析与控制 ME369-lecture 8.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University “控制系统设计”? 控制系统组成元件 0)控制对象 1)执行元件 2) 测量元件 3) 给定元件 4)放大元件 5) 比较元件 6) 控制器 7) 校正元件(补偿器) 设定性能
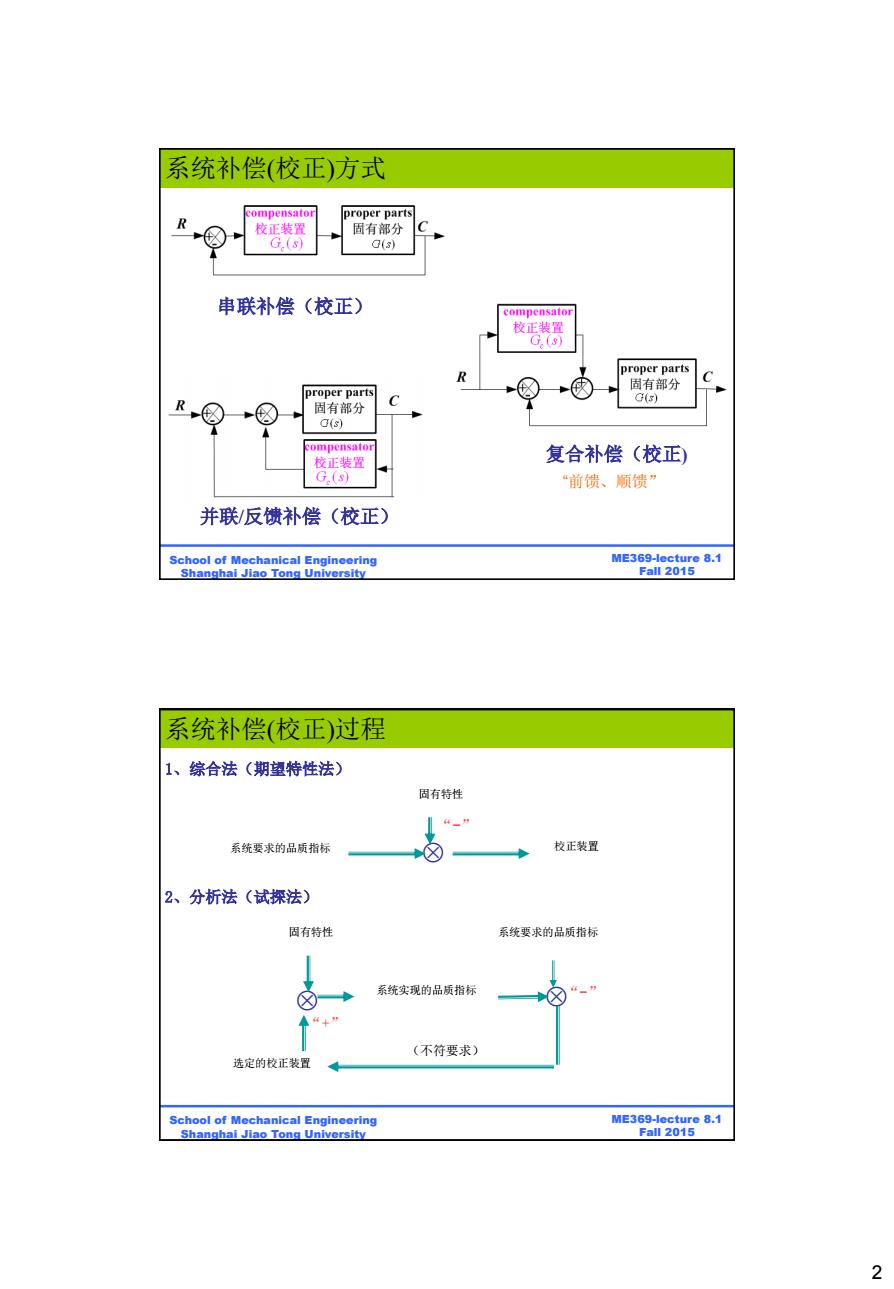
系统补偿(校正)方式 R compensator proper parts +⑧ 校正装置 固有部分 G.(s) (s) 串联补偿(校正) compensator 校正装置 G(3) proper parts +⑧ 固有部分 proper parts C G() R,☒ 固有部分 C(s) compensator 校正装置 复合补偿(校正) G.(8) “前馈、顺馈” 并联/反馈补偿(校正) School of Mechanical Engineering ME369-lecture 8.1 Shanghai Jiao Tong University Fal12015 系统补偿(校正)过程 1、综合法(期望特性法) 固有特性 系统要求的品质指标 ☒ 校正装置 2、分析法(试探法) 固有特性 系统要求的品质指标 系统实现的品质指标 4+” (不符要求) 选定的校正装置 School of Mechanical Engineering ME369-lecture 8.1 Shanghai Jiao Tong University Fall 2015 2
2 ME369-lecture 8.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 串联补偿(校正) 并联/反馈补偿(校正) 复合补偿(校正) 系统补偿(校正)方式 “前馈、顺馈” ME369-lecture 8.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 系统补偿(校正)过程 1、综合法(期望特性法) 固有特性 系统要求的品质指标 校正装置 “-” 2、分析法(试探法) (不符要求) “+” “-” 固有特性 系统要求的品质指标 选定的校正装置 系统实现的品质指标
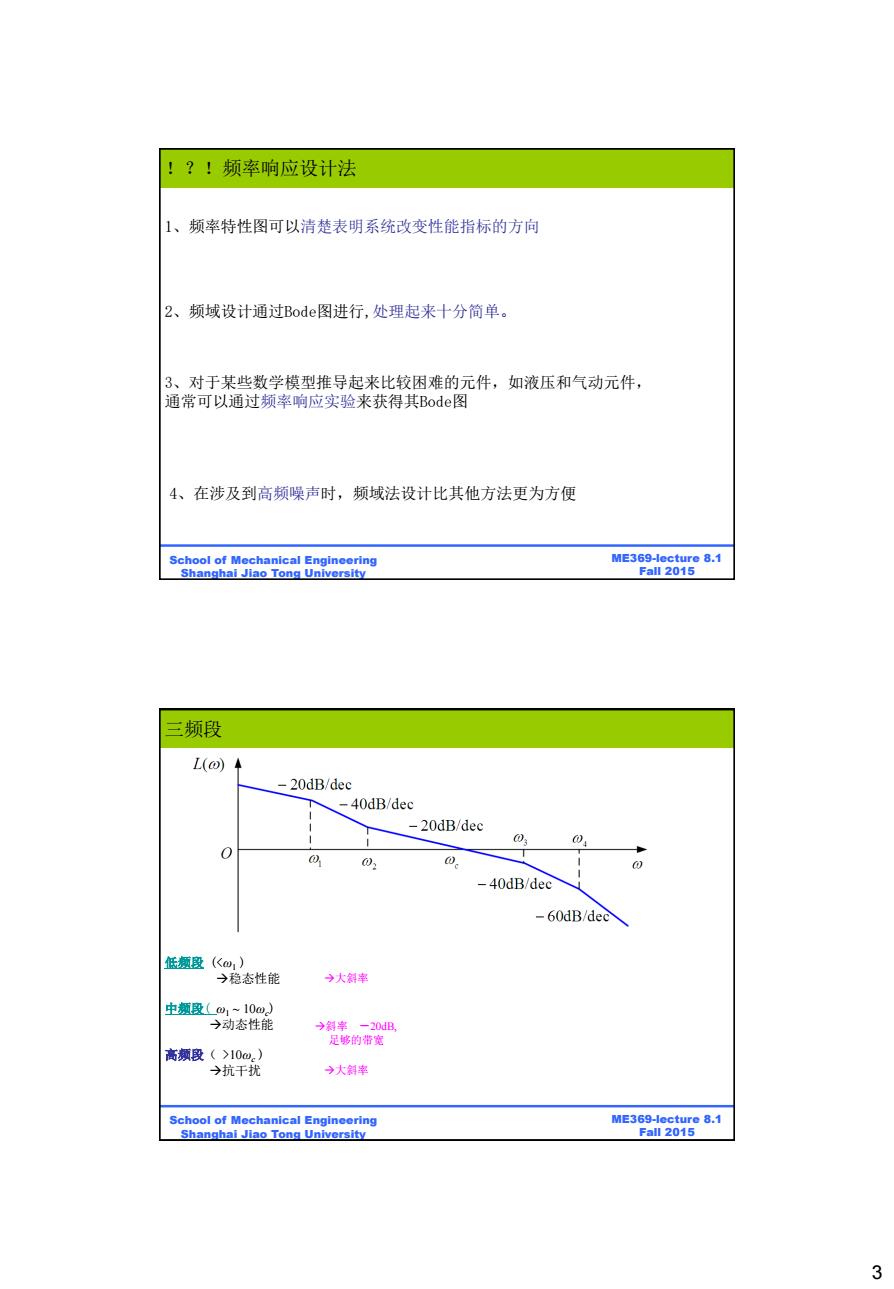
!?!频率响应设计法 1、频率特性图可以清楚表明系统改变性能指标的方向 2、频域设计通过Bode图进行,处理起来十分简单。 3、对于某些数学模型推导起来比较困难的元件,如液压和气动元件, 通常可以通过频率响应实验来获得其Bode图 4、在涉及到高频噪声时,频域法设计比其他方法更为方便 School of Mechanical Engineering ME369-lecture 8.1 Shanghai Jiao Tong University Fal12015 三频段 L(@) -20dB/dec -40dB/dec -20dB/dec 03 @ 40dB/dec -60dB/dec 低颜段(《),) →稳态性能 →大斜率 中麵段(w1~10m,) →动态性能 →斜率一20dB, 足够的带宽 高颜段(>10w.) →抗干扰 →大斜率 School of Mechanical Engineering ME369-lecture 8.1 Shanghai Jiao Tong University Fall 2015 3
3 ME369-lecture 8.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 1、频率特性图可以清楚表明系统改变性能指标的方向 2、频域设计通过Bode图进行,处理起来十分简单。 4、在涉及到高频噪声时,频域法设计比其他方法更为方便 !?!频率响应设计法 3、对于某些数学模型推导起来比较困难的元件,如液压和气动元件, 通常可以通过频率响应实验来获得其Bode图 ME369-lecture 8.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 低频段 (<ω1 ) 稳态性能 中频段( ω1 ~ 10ωc) 动态性能 高频段( >10ωc ) 抗干扰 斜率 -20dB, 足够的带宽 大斜率 大斜率 三频段
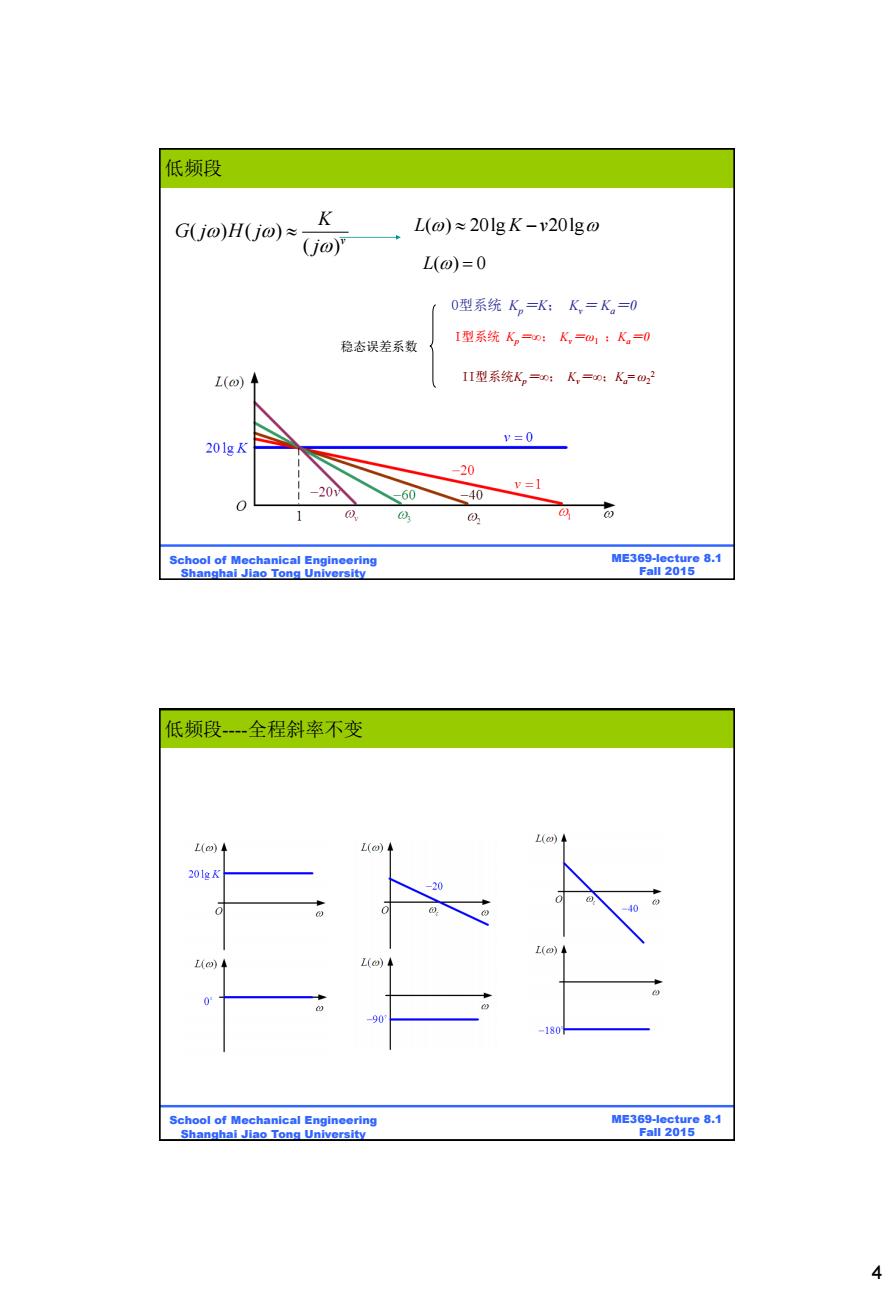
低频段 K Gjo)H(jo)≈ L(o)≈20lgK-v20lgo (jo) L(o)=0 0型系统K。=K:K,=K。=0 稳态误差系数 I型系统K,=0:K,=1:K=0 L(o)◆ I型系统K。=0:K,=0:K。=2 y=0 201gK -20 -20N v=1 60 -40 O 1 0 可 School of Mechanical Engineering ME369-lecture 8.1 Shanghai Jiao Tong University Fall 2015 低频段全程斜率不变 L(◆ L()◆ L(o) -20 40 L(a)◆ L()◆ L(o) 0. -180 School of Mechanical Engineering ME369-lecture 8.1 Shanghai Jiao Tong University Fall 2015 4
4 ME369-lecture 8.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University ( ) ( ) ( )v K G j H j j L K v ( ) 20lg 20lg L( ) 0 稳态误差系数 0型系统 Kp=K; Kv= Ka=0 I型系统 Kp=∞; Kv=ω1 ;Ka=0 II型系统Kp=∞; Kv=∞;Ka= ω2 2 低频段 ME369-lecture 8.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 低频段----全程斜率不变

低频段--中频段保持-20db/dec L() L(o)◆ K G()H(@)=- 2)f)= 0 1+@ jo -20 0 y=180°-g9 y=90° Lo) ◆ GU)H(j) L(ao)◆ 迎+2+(巴1 K1+巴 60 40 G(io)H(io)= 1 (op (Uj)2 -20 -20 物 9 0 y=g1 y=-90°+g1 1-(@2 School of Mechanical Engineering ME369-lecture 8.1 Shanghai Jiao Tong University Fal12015 高频段 L(co)◆ G(i@)H(jo)= K R jo L(am)◆ G(j)H(j) j0+2+巴 -20 03 -20 7=90° -60 K 25 L(o)◆ G(j)H(jo)=- jo1+@ y=90°-g 1-@ -20 -40 y=90°-g10=g@ @3 School of Mechanical Engineering ME369-lecture 8.1 Shanghal Jiao Tong University Fall 2015 5
5 ME369-lecture 8.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 1 1 ( ) ( ) j K G j H j 1 1 180 c tg γ=90° ( ) ( ) K G j H j j 2 1 ( ) (1 ) ( ) ( ) j j K G j H j 1 1 c tg 2 1 1 3 ( ) ( ) [1 ( ) ] ( ) G j H j j j K j 1 1 2 1 2 90 1 ( ) c c tg 低频段----中频段保持-20db/dec ME369-lecture 8.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University (1 ) ( ) ( ) 2 j j K G j H j 1 1 2 2 90 c c tg tg [1 ( ) ] ( ) ( ) 2 2 2 j j j K G j H j 1 2 2 2 2 90 1 ( ) c c tg γ=90° ( ) ( ) K G j H j j 高频段