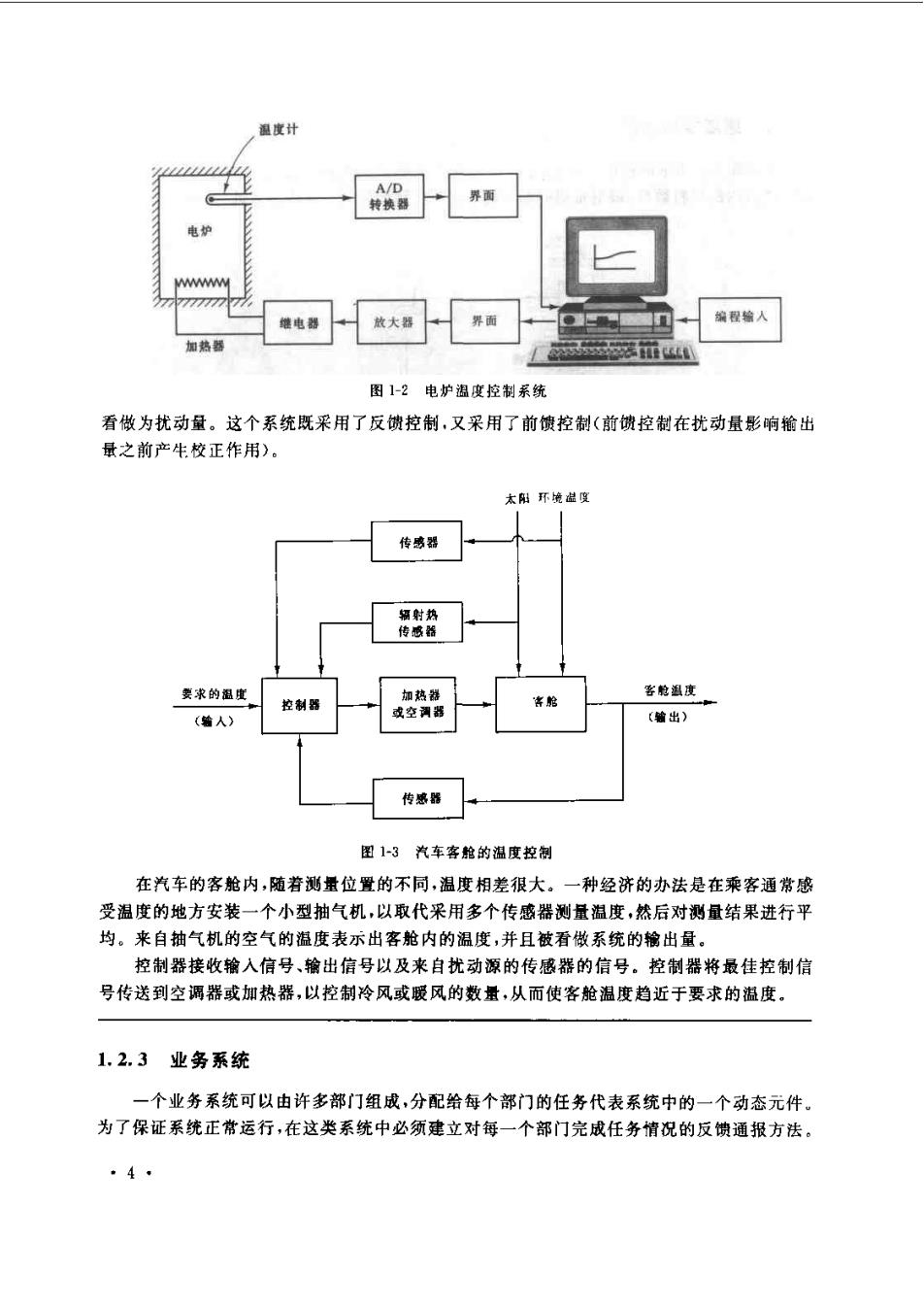
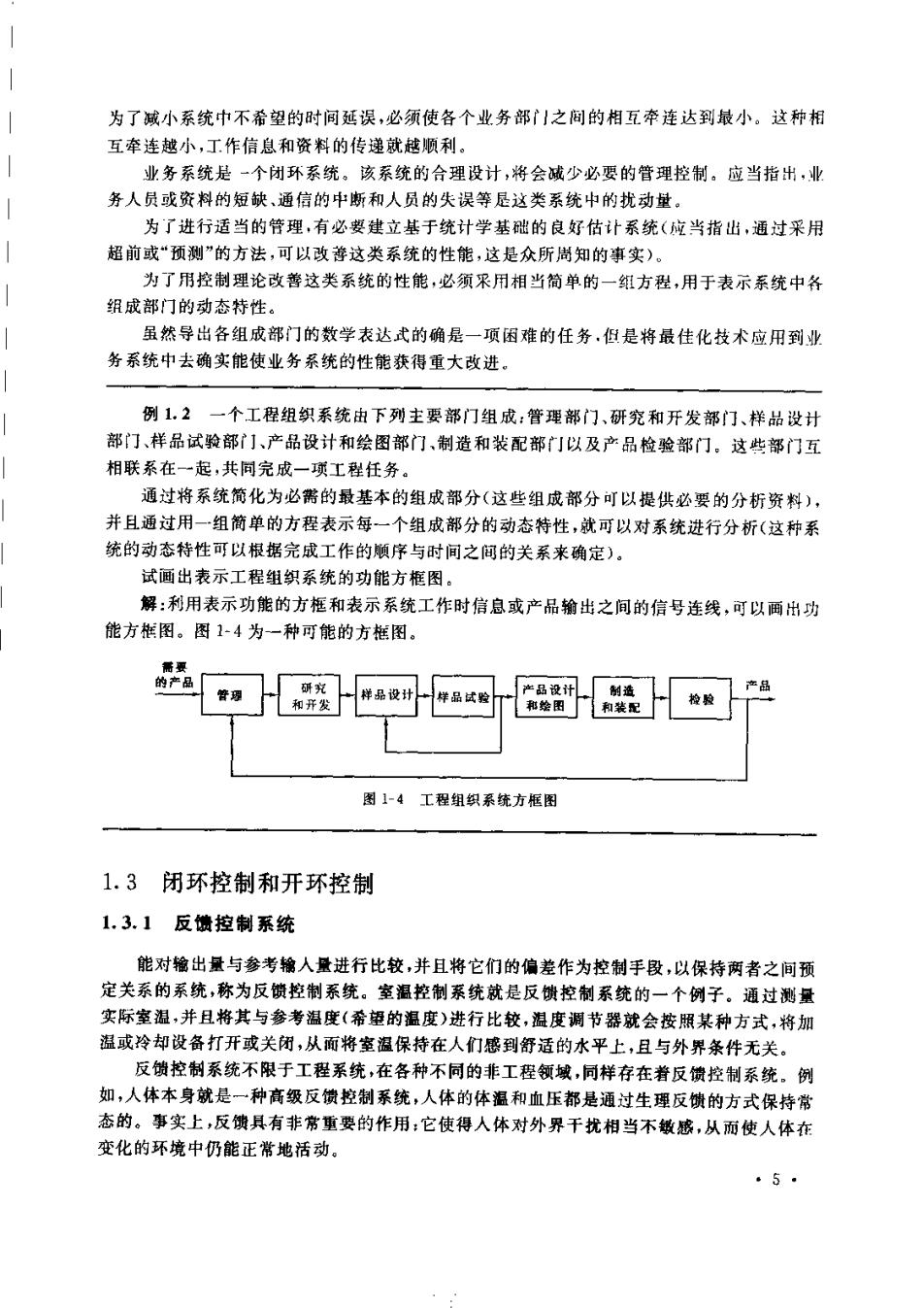
温度计 A/D 转换器 界面 电炉 M 77777 继电器 放大器 界面 编程输人 加热馨 25i 图1-2电炉温度控制系统 看做为扰动量。这个系统既采用了反馈控制,又采用了前馈控制(前馈控制在扰动量影响输出 量之前产生校正作用)。 太阳环境品度 传感器 幅射热 传感器 要求的温度 加热器 客舱温度 控制器 客舱 或空潤器 (轴人) 〔输出) 传感器 图13汽车客舱的温度控制 在汽车的客舱内,随着测量位置的不同,温度相差很大。一种经济的办法是在乘客通常感 受温度的地方安装一个小型抽气机,以取代采用多个传感器测量温度,然后对测量结果进行平 均。来自抽气机的空气的温度表示出客舱内的温度,并且被看做系统的输出量。 控制器接收输入信号、输出信号以及来自扰动源的传感器的信号。控制器将最佳控制信 号传送到空调器或加热器,以控制冷风或暖风的数量,从而使客舱温度趋近于要求的温度。 1.2.3业务系统 一个业务系统可以由许多部门组成,分配给每个部门的任务代表系统中的一个动态元件。 为了保证系统正常运行,在这类系统中必须建立对每一个部门完成任务情况的反馈通报方法。 ·4·
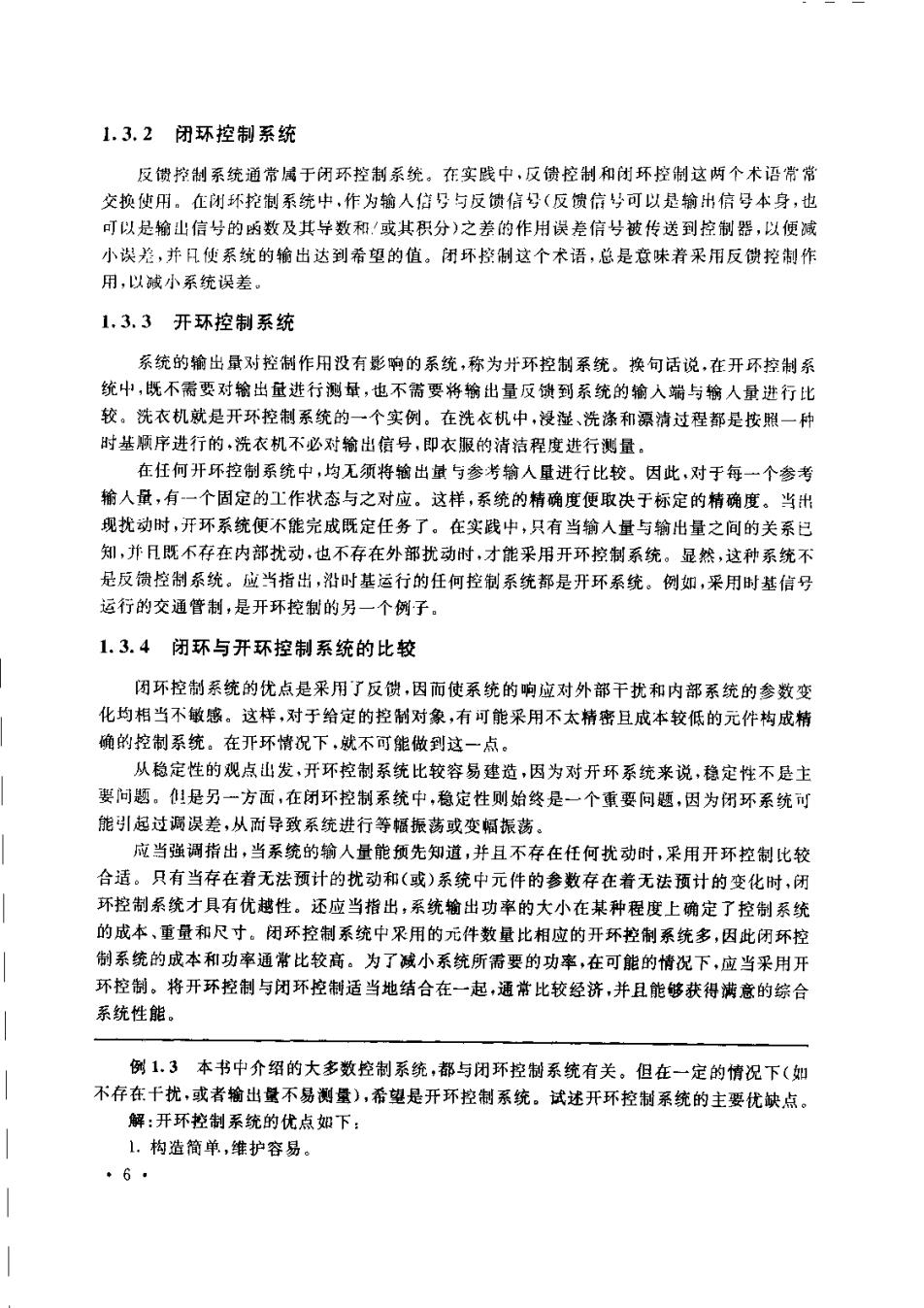
为了减小系统中不希望的时间延误,必须使各个业务部」之间的相互牵连达到最小。这种相 互牵连越小,工作信息和资料的传递就越顺利。 业务系统是一介闭环系统。该系统的合理设计,将会诚少必要的管理控制。应当指出,业 务人员或资料的短缺、通信的中断和人员的失误等是这类系统中的扰动量。 为了进行适当的管理,有必要建立基于统计学基础的良好估计系统(应当指出,通过采用 超前或“预测”的方法,可以改善这类系统的性能,这是众所尚知的事实)。 为了用控制理论改善这类系统的性能,必须采用相当简单的一组方程,用于表示系统中各 组成部门的动态特性。 虽然导出各组成部门的数学表达式的确是一项困难的任务,但是将最佳化技术应用到业 务系统中去确实能使业务系统的性能获得重大改进。 例1.2一个工程组织系统由下列主要部门组成:管理部门、研究和开发部门、样品设计 部门、样品试验部门、产品设计和绘图部门、制造和装配部门以及产品检验部门。这些部门互 相联系在一起,共同完成一项工程任务。 通过将系统简化为必需的最基本的组成部分(这些组成部分可以提供必要的分析资料), 并且通过用一组简单的方程表示每一个组成部分的动态特性,就可以对系统进行分析(这种系 统的动态特性可以根据完成工作的顺序与时间之间的关系来确定)。 试画出表示工程组织系统的功能方框图。 解:利用表示功能的方框和表示系统工作时信息或产品输出之间的信号连线,可以画出功 能方框图。图1-4为一种可能的方框图。 需要 的产品 研究 产品设计 制造 产品 管理 样品设计 和开发 样品试验 和绘图 和装配 控验 图1-4工程组织系统方框图 1.3闭环控制和开环控制 1.3.1反馈控制系统 能对输出量与参考输人量进行比较,并且将它们的偏差作为控制手段,以保持两者之间预 定关系的系统,称为反愤控制系统。室温控制系统就是反馈控制系统的一个例子。通过测量 实际室温,并且将其与参考温度(希望的温度)进行比较,温度调节器就会按照某种方式,将加 温或冷却设备打开或关闭,从面将室温保持在人们感到舒适的水平上,且与外界条件无关。 反馈控制系统不限于工程系统,在各种不同的非工程领域,同样存在着反馈控制系统。例 如,人体本身就是一种高级反馈控制系统,人体的体温和血压都是通过生理反馈的方式保持常 态的。事实上,反馈具有非常重要的作用:它使得人体对外界干扰相当不敏感,从而使人体在 变化的环境中仍能正常地活动。 ·5▣
1.3.2闭环控制系统 反馈控制系统通常属于闭环控制系统。在实践中,反馈控制和闭环控制这两个术语常常 交换使用。在闭环挖制系统中,作为输人倍号与反馈信号(反馈信号可以是输出信号本身,也 可以是输山信号的函数及其导数和,/或其积分)之差的作用误差信号被传送到控制器,以便减 小误羌,并凡使系统的输出达到希望的值。闭环揆制这个术语,总是意味着采用反馈控制作 用,以诚小系统误差。 1.3.3开环控制系统 系统的输出量对控制作用没有影响的系统,称为开环控制系统。换句话说,在开环控制系 统中,既不需要对输出武进行测量,也不需要将输出量反馈到系统的输入端与输人量进行比 较。洗衣机就是开环控制系统的一个实例。在洗衣机中,浸湿、洗涤和漂清过程都是按照一种 时基颗序进行的,洗衣机不必对输出信号,即衣服的清洁程度进行测量。 在任何开环控制系统中,均无须将输出量与参考输人壁进行比较。因此,对于每一个参考 输人量,有一个固定的工作状态与之对应。这样,系统的精确度便取决于标定的精确度。当出 现扰动时,开环系统便不能完成既定任务了。在实践中,只有当输入量与输出量之间的关系已 知,并凡既不存在内部扰动,也不存在外部扰动时,才能采用开环控制系统。显然,这种系统不 是反馈控制系统。应当指出,沿时基运行的任何控制系统都是开环系统。例如,采用时基信号 运行的交通管制,是开环控制的另一个例子。 1.3.4闭环与开环控制系统的比较 闭环控制系统的优点是采用了反馈,因而使系统的响应对外部干扰和内部系统的参数变 化均相当不敏感。这样,对于给定的控制对象,有可能采用不太精密且成本较低的元件构成精 确的控制系统。在开环情况下,就不可能做到这一点。 从稳定性的观点出发,开环控制系统比较容易建造,因为对开环系统来说,稳定性不是主 要问题。但是另一方面,在闭环控制系统中,稳定性则始终是一个重要问题,因为闭环系统可 能引起过调误差,从而导致系统进行等幅振荡或变幅振荡。 应当強调指出,当系统的输人量能预先知道,并且不存在任何扰动时,采用开环控制比较 合适。只有当存在着无法预计的扰动和(或)系统中元件的参数存在着无法预计的变化时,闭 环控制系统才具有优越性。还应当指出,系统输出功率的大小在某种程度上确定了控制系统 的成本、重量和尺寸。闭环控制系统中采用的元件数量比相应的开环控制系统多,因此闭环控 制系统的成本和功率通常比较高。为了减小系统所需要的功率,在可能的情况下,应当采用开 环控制。将开环控制与闭环控制适当地结合在一起,通常比较经济,并且能够获得满意的综合 系统性能。 例1.3本书中介绍的大多数控制系统,都与闭环控制系统有关。但在一定的情况下(如 不存在干扰,或者输出壁不易测量),希望是开环控制系统。试述开环控制系统的主要优缺点。 解:开环控制系统的优点如下: 1.构造简单,维护容易。 ◆6·
2.成本比相应的闭环系统低, 1 3.不存在稳定性问题。 4.当输出量难于测鼠,或者要测量输出量在经济上不允许时,采用开环系统比较合适(例 如在洗衣机系统中,耍提供-一个测量洗衣机输出品质,即衣服的清洁程度的装置,必将花费很 天)。 开环控制系统的缺点如下: 1.扰动和标定尺度的变化将引起误差,从而使系统的输山量偏离希望的数值。 2.为了保持必要的输出品质,需要对标定尺度随时修止。 1.4本书概貌 | 下面简单介绍本书的结构和内容。 | 第1章介绍了行关控制系统的基本知识。第2章介绍基本的拉普拉斯变换理论,这些内 容对于掌握本书介绍的控制理论是不可缺少的。第3章涉及到动态系统的数学模型,包括以 传递函数形式表示的模型和以状态空间方程形式表示的模型。本章讨论了机械系统、电气系 统和电子系统的数学模型。此外,本章还包括了信号流图和非线性数学模型的线件化。第4 章讨论了液位系统、气动系统、液压系统和热力系统的数学模型。第5章讨论了一阶、二阶和 高阶系统的瞬态响应分析,详细地讨论了用MATLAB进行的瞬态响应分析,劳斯稳定判据和 单位反馈控制系统中的稳态误差也在本章中作了介绍。 第6章分析了控制系统的根轨迹,并且提供了做根轨迹图的一殿规则。这一章还详细地 讨论了如何用MATLAB做根轨图。第7章涉及到通过根轨迹法设计控制系统的问题,特删 是详细讨论了如何用根轨迹法设计超前校正器、滞后校正器和滞后·超前校正器。第8章给出 了挖制系统的频率响应分析方法,讨论了伯德图,极坐标图、奈奎斯特稳定性判据和闭环频率 响应。第9章涉及到用频率响应法设计控制系统。在这一章中,将采用伯德图设计超前校让 器、滞后校正器和滞后超前校正器。第10章讨论了基本的和变形的PD控制,在这章中引入 」二自由度控制系统,在设计高性能控制系统时,采用二自由度结构,并广泛使用了MAT- LAB。 第11章介绍了挖制系统状态空间分析的基础知识,导出了定常状态方程的解,并月讨论 了可控性和可观测性的基本概念。第12章涉及到控制系统的状态空间设计。这一章首先讨 论极点配置问题,接着讨论状态观测器设计,带观测器的调节器系统设计和带观测器的控制系 统设计。最后讨论了二次型最佳控制。 7
第2章拉普拉斯变换' 2.1引言 拉普拉斯变换法是一种解线性微分方程的简使运算方法。通过运用拉普拉斯变换,我们 可以将许多普通函数,如止弦函数、阻尼正弦函数和指数函数,转变为复变量5的代数函数。 诸如微分和积分这样-一些运算,可以用复数平面内的代数运算来取代。因此,线性微分力程可 以转变成复变量s的代数方程。如果针对应变量对:的代数方程求解,则微分方程的解(应变 量的拉普拉斯反变换)可以用拉普拉斯变换表,或者用2.5节和2.6节中介绍的部分分式展开 法求得。 拉普拉斯变换法的优点是可以用图解法预测系统的性能,而无须实际求解系统的微分方 程。拉普拉斯变换法的另一个优点是当解微分方程时,可以同时获得解的瞬态分量和稳态分 量。 木章2.1节是对本章内容的初步评论。2.2节简要地复习复变量和复变函数。2.3节导 出了控制工程中经常应用的时间函数的拉普拉斯变换。2.4节介绍有用的拉普拉斯变换定 理,2.5节则讨论用B(s)/A(s)部分分式展开的拉普拉斯反变换,其中A(s)和B(s)是s的多项 式。2.6节介绍用MATLAB求B(s)/A(s)的部分分式展开法以及求B(s)/A(s)的零点和极 点的计算方法。2.?节讨论用拉普拉斯变换法求解线性定常徽分方程。 2.2复变量和复变函数 在介绍拉普拉斯变换之前,首先复习复变量和复变函数。我们还将复习尤拉定理,该定理 表示了正弦函数与指数函数之间的关系。 2.2.1复变量 复数有实部和虚部两部分,两部分都是常数。如果实部和(或)虚部是变量,则称其为复变 量。在拉普拉斯变换中,用符号s表示复变量,即 s=0十jw 式中,0为实部,w为虚部。 2.2.2复变函数 复变函数G(s)是3的函数,它具有实部和虚部,即 G(s)=Gx十jG, ·如果读者已经熟悉拉普拉斯变换,可以跳过本章。 8·