
分析离散时间信号(变量),20世纪60年代,发现 了快速傅里叶变换(F℉T)算法,运算时间比常规 傅里叶变换运算所需的时间减少了几个数量级
分析离散时间信号(变量),20世纪60年代,发现 了快速傅里叶变换(FFT)算法,运算时间比常规 傅里叶变换运算所需的时间减少了几个数量级
3.2LTI系统对复指数信号的响应 在LTI系统中,将信号表示成基本信号的线性组 合,这些基本信号应具有以下两个性质: 1.由这些基本信号能够构成应用相当广泛的一类信号 2.LTI系统对每一个基本信号的响应应该十分简单, 以使得系统对任意输入信号得响应有一个很方便的 表示式。 6对于连续时间复指数信号t和离散时间复指数信号 z”,其中S和z都是复数,都具备上面两个性质。 6本节讨论集中在第二个性质上,并以此说明在LTI 系统中为什么要应用傅里叶级数和傅里叶变换
3.2 LTI系统对复指数信号的响应 在LTI系统中,将信号表示成基本信号的线性组 合,这些基本信号应具有以下两个性质: 1. 由这些基本信号能够构成应用相当广泛的一类信号 2. LTI系统对每一个基本信号的响应应该十分简单, 以使得系统对任意输入信号得响应有一个很方便的 表示式。 对于连续时间复指数信号est和离散时间复指数信号 zn,其中s和z都是复数,都具备上面两个性质。 本节讨论集中在第二个性质上,并以此说明在LTI 系统中为什么要应用傅里叶级数和傅里叶变换
在研究LTI系统时,复指数信号的重要性在于:一 个LTI系统对复指数信号的响应也是同样一个复指 数信号,不同的只是在幅度上的变化。 连续时间:e→H(s)e 离散时间:z”→H(z)z” 这里H(s)和H(z)是一个复振幅因子,一般说来是复 变量s和z的函数。 一个信号,若系统对该信号的输出响应仅是一个常 数(可能是复数)乘以输入,则称该信号为系统的 特征函数,而幅度因子称为系统的特征值
在研究LTI系统时,复指数信号的重要性在于:一 个LTI系统对复指数信号的响应也是同样一个复指 数信号,不同的只是在幅度上的变化。 这里H(s)和H(z)是一个复振幅因子,一般说来是复 变量 s和z的函数。 一个信号,若系统对该信号的输出响应仅是一个常 数(可能是复数)乘以输入,则称该信号为系统的 特征函数,而幅度因子称为系统的特征值。 ( ) ( ) st st n n e H se z Hzz → → 连续时间: 离散时间:
3.2LTI系统对复指数信号的响应 (1)连续时间LTI系统 x(t)=est h() y(t)=H(s)est 重要概念!! y(t)=x(t)*h(t)=x(t-t)h()dt y(t)x(t)H (s) [eu-"h(r)dr e"["h(r)e-sdr =eH(s) (特征函数) H(s)=h(t)e-sdt H(s)(特征值) 若一个LTI系统的输出响应仅是其输入信号乘以一个常数(可能是复 常数),则称该输入信号为系统的特征函数,而幅度因子H(S)称为特征 值。 第3章周期信号的傅里叶级数表示 19
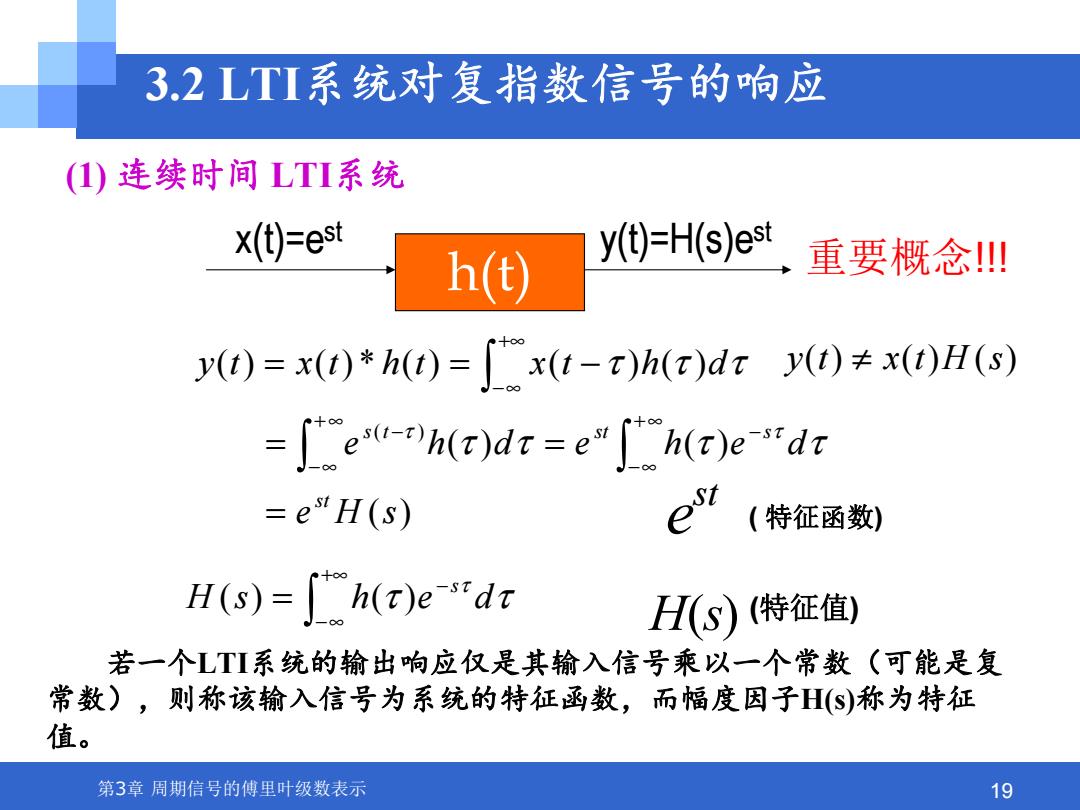
第3章 周期信号的傅里叶级数表示 19 3.2 LTI系统对复指数信号的响应 (1) 连续时间 LTI系统 h(t) x(t)=est y(t)=H(s)est )( )( )( )()()(*)()( )( sHe dehedhe dhtxthtxty st ts st s = = = = −= ∞+ ∞− − ∞+ ∞− − +∞ ∞− ττ ττ τττ τ τ +∞∞− − = ττ τ dehsH s )()( 若一个LTI系统的输出响应仅是其输入信号乘以一个常数(可能是复 常数),则称该输入信号为系统的特征函数,而幅度因子H(s)称为特征 值。 st e (特征值) sH )( 重要概念!!! ≠ sHtxty )()()( ( 特征函数)
(2)离散时间LTI系统 x[n]=zn hn间 y[n]=H(Z)z" 重要概念山 十o∞ yn]=xIn]*hn]=>xIn-k]hk] y[n]≠x[n]H(z) k=-∞ =∑zm-hK]=z”∑z*hk] k=-00 z"H(z) Z”7(特征函数到 H(a)=∑Mk& H(a (特征值) 第3章周期信号的傅里叶级数表示 20
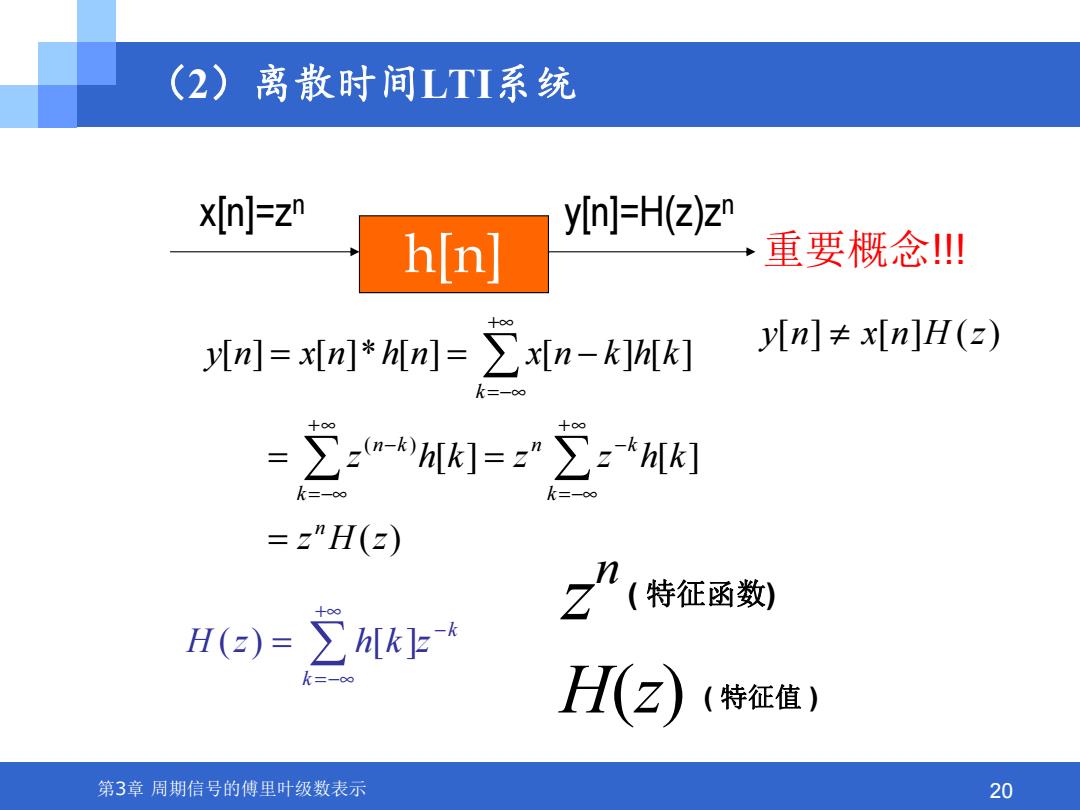
第3章 周期信号的傅里叶级数表示 20 h[n] x[n]=zn y[n]=H(z)zn )( ][ ][ ][][][*][][ )( zHz khzzkhz khknxnhnxny n k n k k kn k = = = = −= ∞+ =−∞ − ∞+ =−∞ − +∞ =−∞ k k zkhzH − +∞ =−∞ = ][)( ( 特征函数) n z zH )( 重要概念!!! ≠ zHnxny )(][][ (2)离散时间LTI系统 ( 特征值 )