Φ》=(g-)y-yR=0 a,=c+4+8,-中-8 n=(g-e)y-y,R,&,=0 v=Rv=RAv=RAv=RBv RRAv=-Av=-v. v,Av 立=A,y=B,功=RA,=Rv,功= 》=y"(G+Bs,--B,s)-(g-)yA=0 西pw》=y(G+B功,--Bs4)+(g-2)'y4 -y,R,(项-,)=0 》=[-g7-(-g-gB]=[y7gB] Dn=-y(-)片-yBs-vR, DD=v BSP +YR
( , ) 0 T rt i j P P j i i i j v R r r v ( , ) 0 T rp i j P Q j i i i j j r r v v R ( , ) 0 T rt i j T P P P P i j j j j i i i i j i ii v r B s r B s r r v ( , ) 0 T rp i j T P Q P Q i j j j j i i i i j i i i i j i j v R v r B s r B s r r v ( , ) i T rt i j T P P T P i j i i i i i q v r r v v B s ( , ) j rt i j T P i i j j q v v B s ( , ) i T rp i j T P Q T Q i j i i i i i i j v R q v r r v v B s ( , ) j rp i j T T P i i j j i j v R q v v B s j i i j j c i i i i v Rv RAv i i i i ii i ii i ii ii v RAv RBv RRAv Av v i i i v Av i i i i ii i ii ii i i v Av Bv RAv Rv v
西w》=y(店+Bsb--Bs0)-(g-))v项=0 u”=yT(9+Bs-i-B,s)+(y-2) -y,R,(9-)=0 市wD=T(店+B功--B,) +(色+B-月-Bs项-A,2+As2) -(g-)-(-)项-(g-)'功=0 ip》=,(G+B,s-i-B,s) +y(店+BS,-日-B,s可-As62+As) +(g-)+(-)+(g-e)'时4 -R,(9-,)=0
( , ) 2 2 0 rt i j T P P i j j j j i i i i T P P P P i j j j j i i i i j j j i i i T T T P P P P P P j i i i j i i i j i i i v r B s r B s v r B s r B s A s As r r v r r v r r v ( , ) 0 T rt i j T P P P P i j j j j i i i i j i ii v r B s r B s r r v ( , ) 0 T rp i j T P Q P Q i j j j j i i i i j i i i i j i j v R v r B s r B s r r v ( , ) 2 2 0 rp i j T P Q i j j j j i i i i T P Q P Q i j j j j i i i i j j j i i i T T T P Q P Q P Q j i i i j i i i j i i i i j i j v R v r B s r B s v r B s r B s A s As r r v r r v r r v

市0=T(-P)+(店+B,项,-月-B,s项-A,2+As”3 -(-)'项-(-)项-(-r)项=0 市p》=(-2)+y(+B0,--B,s项-A2+As2) +(g-)项+(-)项+(-)项 -v,R(-,)=0 时=-,项鸟=项 y》=2y(-)+y(4小2-A)+(-7)'y ym》=-2y(G-)+y(As02-As6)+(-e)y
( , ) 2 2 0 rt i j T P P T P P P P i j i i j j j j i i i i j j j i i i T T T P P P P P P j i i i j i i i j i i i v r r v r B s r B s A s As r r v r r v r r v ( , ) 2 2 0 rp i j T P Q T P Q P Q i j i i j j j j i i i i j j j i i i T T T P Q P Q P Q j i i i j i i i j i i i i j i j v R v r r v r B s r B s A s As r r v r r v r r v i ii v v i i i v v ( , ) 2 2 2 2 T rt i j T P P T P P P P i i j i i j j j i i i j i i i v r r v A s As r r v ( , ) 2 2 2 2 T rp i j T P Q T P Q P Q i i j i i j j j i i i j i i i v r r v A s As r r v
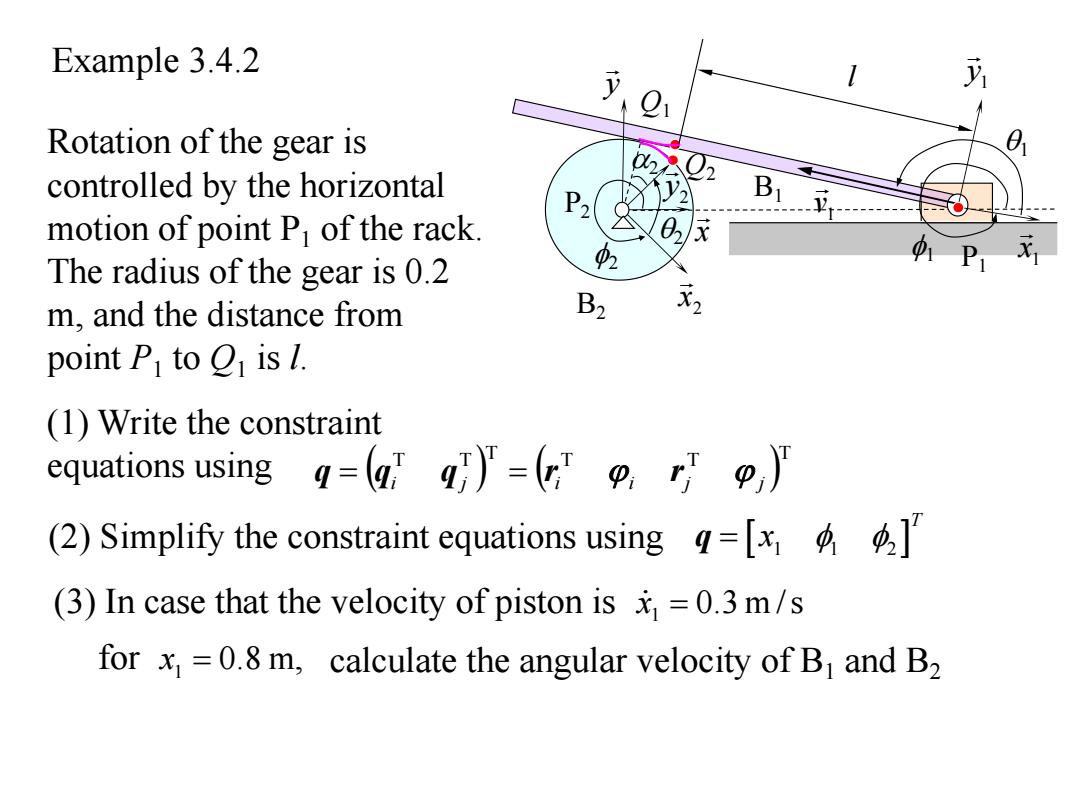
Example 3.4.2 1) Rotation of the gear is controlled by the horizontal motion of point P of the rack. The radius of the gear is 0.2 m,and the distance from B2 X2 point Pi to is l. (1)Write the constraint equations using=(qq)J'-(Tp,rp,)' (2)Simplify the constraint equations using q=[x] (3)In case that the velocity of piston is=0.3 m/s for x=0.8 m,calculate the angular velocity of Bi and B2
Example 3.4.2 Rotation of the gear is controlled by the horizontal motion of point P1 of the rack. The radius of the gear is 0.2 m, and the distance from point P1 to Q1 is l. (1) Write the constraint equations using T T T T T T i j i i j j q q q r r (2) Simplify the constraint equations using 1 1 2 T q x (3) In case that the velocity of piston is 1 x 0.3 m/s for 1 x 0.8 m, calculate the angular velocity of B1 and B2 B2 B1 2 2 x x y 2 y 2 2 1 x 1 y 1 1 v P1 P2 Q2 Q1 l 1