
目录 第一章具有一个自由度的系统 1.1自由谐和振动 1.2旋转振动 8 1.3能量法 14 1.4瑞利法 19 1.5具有多个质量的梁和轴 26 1.6强迫振动:稳态 30 1.7强迫振动:瞬态 36 1.8具有粘滞阻尼的自由振动 40 1.9具有粘滞阻尼的强迫振动 46 1.10等效粘滞阻尼 51 1.11一般周期干扰力 55 1.12任意干扰力 62 1.13任意支承运动 70 1.14 反应谱 76 1.15 反应的数值解 82 第二章具有非线性特征的系统 94 2.1非线性系统的例子 94 2.2速度和周期的直接积分 103 2.3自由振动的近似方法 109 2.4强迫非线性振动 115 2.5分段线性系统… 121 2.6非线性系统的数值解 133 第三章具有两个自由度的系统 145 3.1两个自由度系统的例子 145 3.2作用力方程:刚度系数 149 3.3位移方程:柔度系数 152 3.4惯性的与重力的耦合 158 3.5无阻尼自由振动… 163 3.6无阻尼强迫振动 171 3.7具有粘滞阻尼的自由振动 177 3.8具有粘滞阻尼的强迫振动 180 第四章具有多个自由度的系统 186 4.1引言………… 186 4.2无阻尼系统的频率和振型形状 186
4.3主坐标与正规坐标 197 4.4对初始条件的正规型反应 202 4.5对施加作用力的正规型反应 207 4.6对支承运动的正规型反应 213 4.7频率和振型形状的选代法 220 4.8多个自由度系统中的阻尼 230 4.9对周期性激发的阻尼反应 233 4.10阻尼系统的瞬变反应 236 4.11瞬变反应的数值解 239 第五章弹性体的振动 245 5.1引言……………… 245 5.2棱柱形杆的自由纵向振动 245 5.3棱柱形杆的强迫纵向反应 251 5.4棱柱形杆的正规型法 256 5.5端点带有一个质量或一个弹簧的棱柱形杆 262 5.6承受纵向支承运动的杆 267 5.7圆轴的扭转振动…… 271 5.8张拉着的钢丝的横向振动 277 5.9棱柱形梁的横向振动 281 5.10简单的横向振动 285 5.11具有其它端点条件的梁的振动 287 5.12旋转惯量的效应和剪切变形的效应 293 5.13简单的强迫反应… 295 5.14具有其它端点条件的梁的强迫反应 299 5.15承受支承运动的梁 301 5.16运动荷载通过的梁 304 5.17轴向力对梁的振动的效应 308 5.18弹性支承上的梁或弹性地基上的梁 309 5.19计算频率的里兹法 312 5.20非棱柱形梁的振动… 315 5.21梁的弯曲和扭转的联合振动 320 5.22圆环的振动… 323 5.23薄膜的横向振动 327 5.24板的横向振动 334 附录计算机程序………… 341 A.1引言…… 341 A:2线性系统的数值解 341 A.3非线性系统的数值解 341 A.4本征值和本征向量的迭代法 342 A.5多个自由度系统的数值解 42
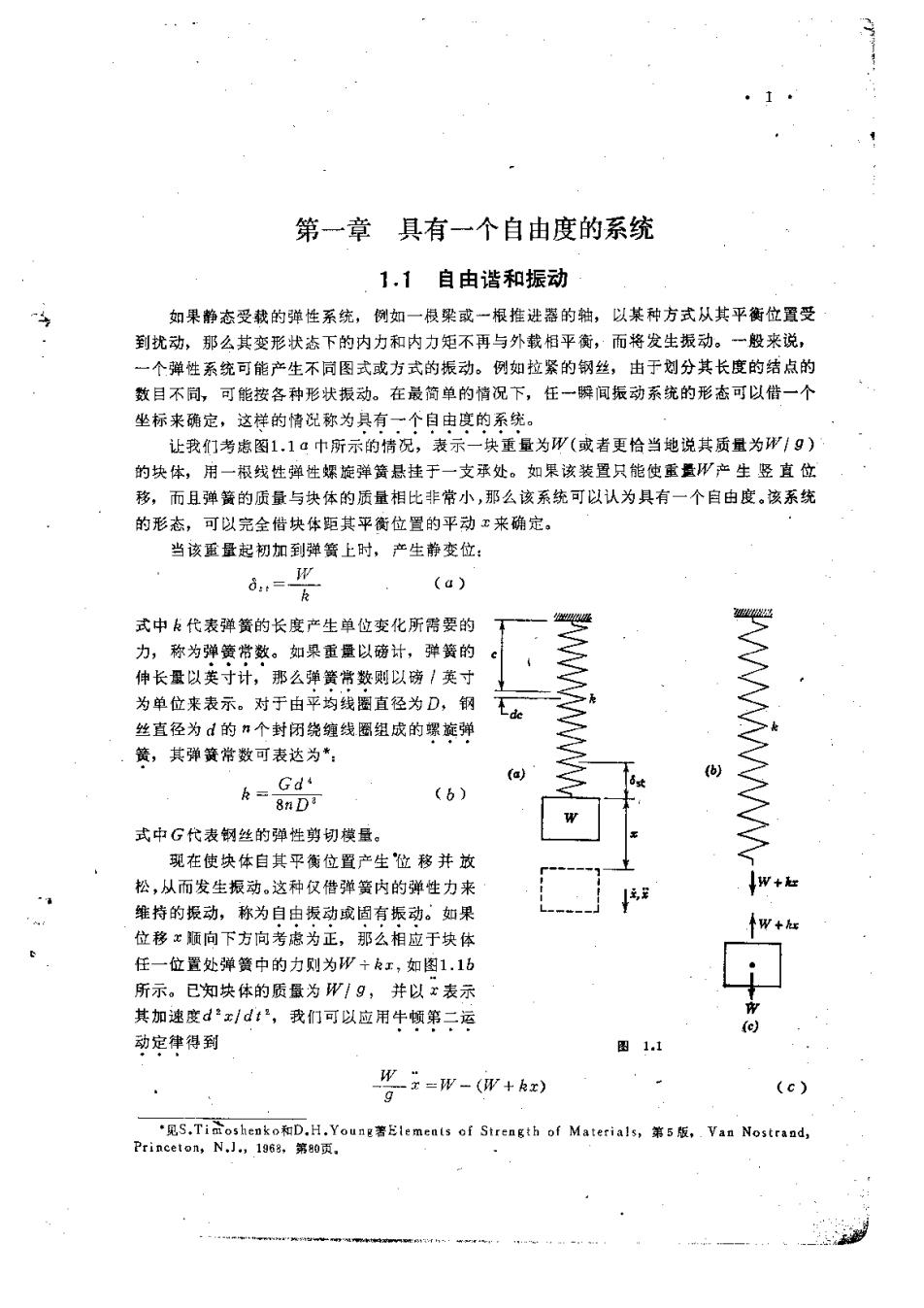
第一章具有一个自由度的系统 1,1自由谐和振动 如果静态受载的弹性系统,例如一根梁或一根推进器的轴,以某种方式从其平衡位置受 到扰动,那么其变形状态下的内力和内力矩不再与外载相平衡,而将发生振动。一般来说, 一个弹性系统可能产生不同图式或方式的振动。例如拉紧的钢丝,由于刘分其长度的结点的 数目不同,可能按各种形状振动。在最简单的情况下,任一瓣间振动系统的形态可以借一个 坐标来确定,这祥的情况称为具有一个自由度的系统。 让我们考虑图1.1a巾所示的情况,表示一块重量为W(或者更恰当地说其质量为W/9) 的块体,用一根线性弹性螺旋弹簧悬挂于一支承处。如果该装置只能使重登W产生竖直位 移,而且弹簧的质量与块体的质量相比非常小,那么该系统可以认为具有一个自由度。该系统 的形态,可以完全借块体距其平衡位置的平动x来确定。 当该重量起初加到弹簧上时,产生静变位: ds形 (a) 式中k代表弹簧的长度产生单位变化所需要的 力,称为弹簧常数。如果重量以磅计,弹簧的 伸长量以芙寸计,那么弹簧常数则以磅/英寸 为单位来表示。对于由平均线圈直径为D,钢 丝直径为d的n个封闭绕缠线圈组成的螺旋弹 簧,其弹簧常数可表达为*: kgor (a) (b) 式中G代表钢丝的弹性剪切模量。 www 6 现在使块体自其平衡位置产生位移并放 松,从而发生振动。这种仪借弹簧内的弹性力来 维持的振动,称为自由振动或固有振动。如果 个W+ 位移x顺向下方向考虑为正,那么相应于块体 任一位置处弹簧中的力则为W+x,如图1.16 所示。已知块体的质量为形/9,并以x表示 其加速度dx/dt2,我们可以应用牛顿第二运 (c) 动定律得到 图1.1 g-x=W-(W+kz) (c) ·晃S.Timoshenko和D,H.Young著Elements of Strength of Materials,第5版,.Van Nostrand, Princeton,N.J,1968,第80页
▣2 作用于块体上的诸不平衡力示于图1、1c中。方程(c)'的右边,重量W消去了,说明该系 统自由振动的运动微分方程与重力场无关。重要的是要记住在上面讨论中位移x是从静平衡 位置度量的并考虑顺向下方向为正。 引进下列符号 p2=9 9 (d) 我们可以用下列形式表示方程(c): 2+p2=0 (1.1) 如果我们取x=C:cospt或x=C2sipt,这里C,和C2为任意常数,那么此方程将得到满 足。将这些解加起来,我们得到方程(1.1)的通解为: x=Cicosp+Casinpf (1.2) 可以看到,重量W的竖直运动具有振动的性质,因为cosP和siPt均为周期函数,这些函 数在时间间隔π之后它们自身重复,因而 D(t+t)一Pt=2π (e) 这种时闻间隔称为振动的周期。它的大小,从方程(),为: r=_27 p (f) 或应用式(d) (1.3) 可以看到,振动的周期仅取决于重量W的大小和弹簧常数,而与位移量无关。我们也可以 说悬挂着的重是W的振动周期与长度等于静变位8,:的单摆的报动周期相同。如果此变位由 理论确定了或由实验确定了,那么周期π可从方程(1,3)来求算出。 每一单位时间内往返的次数(例如每秒的周数)称为振动的频率。以∫表示频率,我们 得到 (1.4) 方程(1,2)所表达的振动称为简谐运动。为了确定积分常数C:和Cz,我们必须考虑 ,初始条件。假设在初始瞬间(t=0)重量W距其平衡位置的位移为x,并假设其初始速度 为x。将t=0代入方程(1.2),我们得到: C1=T0 (9) 将方程(1.2)对时间取导数,并代入f=0,我们得到: C2= p (h) 将(9)和(:)中的常数值代入方程(1,2),得到重量W的振动表达式: x=zocosp!+C。sinpt p (1.5) 可以看到,在此情况下,振动由两部分组成:一部分与c0sPt成比例,且取决于初始位移 xo,另一部分与sinpt成比例,取决于初始速度工a。这每一部分可以如图1.2a和1.26用位

3 移对时间绘成曲线以图解表示。振动着的重量形,在任一时刻·处的总位移工,可以从该时 刻两曲线的纵坐标加到一起来得到,如图1.2c的曲线所示。 、 表示振动的另一种方法是借 助于转动向量。想像大小为x。的 向量0F(见图1.3),以等角 速度P绕固定点O转动。此速度 xo cos pe 称为振动的角频率或圆周频率。 如果在初始瞬间(t=0)时,向 量OP与x轴相物合,那么在任 一其它时问t时,它与该轴所成 的角等于Pt。此向量在x轴 上的投影等于zocosp.t,代表 (a (1.5)式的第一项。取另一大 小为x/p且垂直于向量OP的 向量OQ,我们看到它在x轴上 的投影给出(1.5)式的第二项。 振动重量的总位移x,借将两个 0 互相垂直以角速度p转动的向量 OP和OQ在x轴上的投影加起 来得到。 如果我们考虑等于向壁OP b 和OQ的向量之和的向量OR代 替这两个向童,并取合成向量在 x轴上的投影,则得到相同的结 果。此向量的大小为A,从图 1.3得到: 4-Y +(停 () 与轴形成的角为Pt一a,其中 (e) a=tan1r。 图1.2 Px。 (j) 从面讨论,显然方程(1.5)可以用下面等效形式来表达: x=Acos (p!-a) (1.6) 式冲用表达式()和《j)代表的A和a为取决于运动初始条件的新常数。可以看到,一 个有cospt成比例,,另一个与sinpt成比例的两个简谐运动相加,又为一个与cos(Pt-a) 成比例的简谐运动,如图1.2c中的图解所表示。此曲线的最大纵坐标A等于图1.3中向量OR 的大小,代表振动着的物体距其平衡位置的最大位移,称为振幅。 由于两个转动向量0P和OR之间的角为a,所以图1,2c中曲线的最大纵坐标对图 1:2a中曲线的最大纵坐标移动a/p值。在这种情况下,可以说,借图1.2c中曲线所代表的