检测系统的静态特性 获取拟合直线方法: (a)端点连线法: 算法:检测系统输入输出曲线的两端点连线 特点:简单、方便,偏差大,与测量值有关 (b)最佳直线法: 算法:使得正负行程的非线性偏差相等且最小 特点:精度最高,计算法(迭代、逐次逼近) 简单实用,三点作图法(两高一低两低一高) (c)最小二乘法: 算法:计算:有n个测量数据:(G1y山(2y2,,Cy,(≥2) 残差:△=-(a+bx) 残差平方和最小:∑△2=min b=. ∑xy-∑x∑☑ ∑∑y-∑∑ n∑x2-(∑x)月 n∑x-(∑x)7 特点:精度高 6
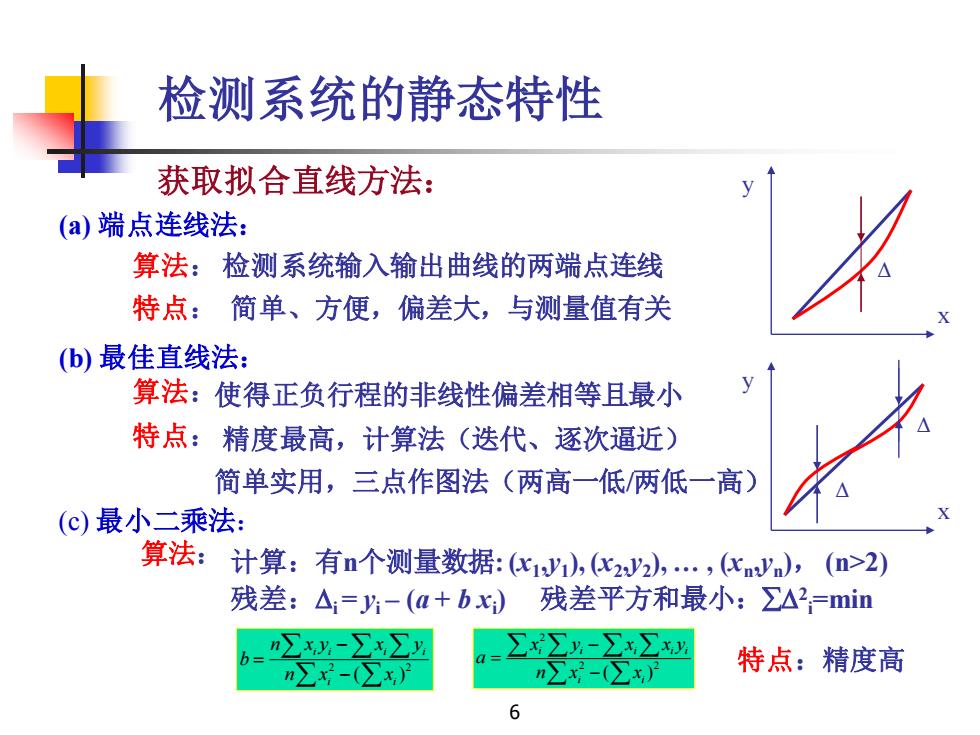
6 检测系统的静态特性 获取拟合直线方法: (c) 最小二乘法: 计算:有n个测量数据: (x1 ,y1 ), (x2 ,y2 ), … , (xn ,yn ), (n>2) 残差:i = yi – (a + b xi ) 残差平方和最小:2 i=min 2 2 ( ) − − = i i i i i i n x x n x y x y b 2 2 2 ( ) − − = i i i i i i i n x x x y x x y a 使得正负行程的非线性偏差相等且最小 (a) 端点连线法: 检测系统输入输出曲线的两端点连线 特点: x y 算法: Δ 简单、方便,偏差大,与测量值有关 (b) 最佳直线法: 精度最高,计算法(迭代、逐次逼近) 算法: 特点: 算法: 特点:精度高 x y Δ Δ 简单实用,三点作图法(两高一低/两低一高)
检测系统的静态特性 (2) 回程误差 定义:检测系统在正行程和反行程的输入输出曲线不重合的程度 亦称空程误差、滞后 (hysteresis) 算法: 相对误差 H Hs×100% yF.s. △Hmar:正反行程输出值的最大偏差 7
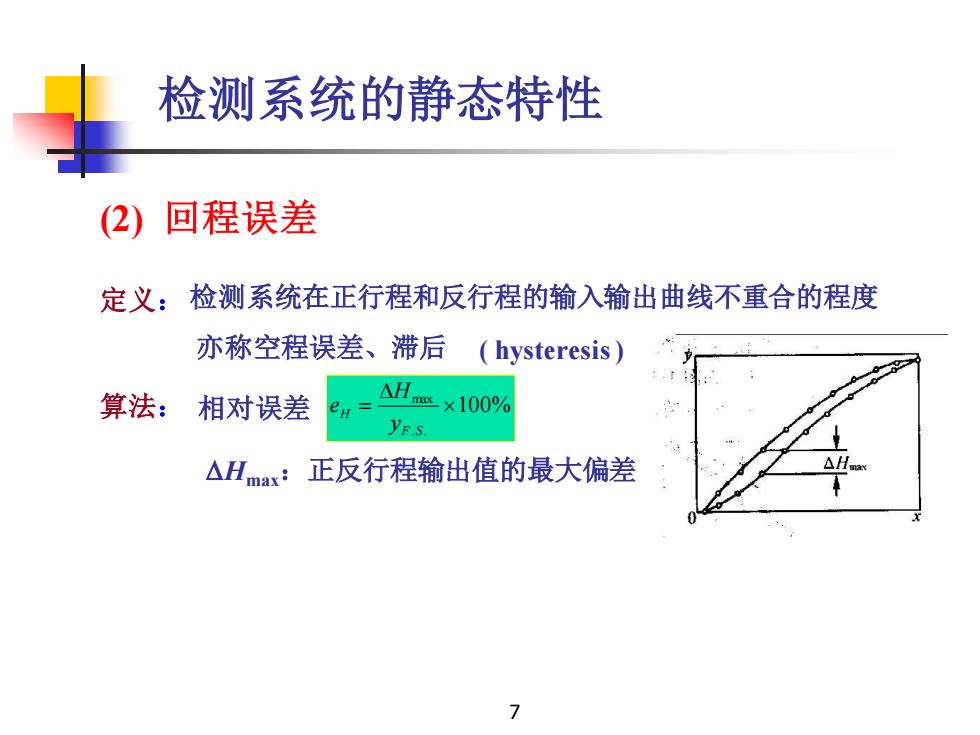
7 检测系统的静态特性 (2) 回程误差 检测系统在正行程和反行程的输入输出曲线不重合的程度 相对误差 100% . . max = F S H y H e Hmax:正反行程输出值的最大偏差 定义: 亦称空程误差、滞后 ( hysteresis ) 算法:

检测系统的静态特性 (3)分辨力: 定义:能够检测出的被测量的最小变化量 表征测量系统的分辨能力(resolution) 说明:1、分辨力--是绝对数值,如0.01mm,0.1g,10ms,… 2、分辨率--是相对数值: 能检测的最小被测量的变 换量相对于满量程的百分 数,如:0.1%,0.02% 3、阀值--在系统输入零点附近的分辨力 8
8 检测系统的静态特性 (3) 分辨力: 能够检测出的被测量的最小变化量 2、分辨率 --- 是相对数值: 定义: 说明: 1、分辨力--- 是绝对数值,如0.01mm,0.1g,10ms,…… 表征测量系统的分辨能力 ( resolution ) 能检测的最小被测量的变 换量相对于满量程的百分 数,如:0.1%, 0.02% 3、阀值--- 在系统输入零点附近的分辨力