德仓创机器人 Dechuang Robot 6.视觉系统基础--一硬件基础 镜头 镜头选择原则 镜头选择原则 镜头接口要跟相机接口匹配安装,也可通过 镜头的工作距离要适当。工作距离是指当图像在焦 转换匹配安装。 距范围内的时候,物体和镜头前端的距离。根据焦 相机接口的种类 接口类型 后截距 接口 距、工作距离、CCD尺寸,可以确定镜头的视场范围。 C Mount 17.526m 螺口 Sensor Size- m CS Mount 12.5mm 螺口 F Mount 46.5mm 卡口 接口配套的原则 Calculation of focal length(f) 相机接口 C Mount CS Mount F Mount f= WD x Cv or Ch FOV (V or H) 可配镜头接口 C/F+转接器 CS/C+节圈 F 镜头光谱特性要符合光源的要求。在机器视觉系统中,镜头不只是与相 机相互作用的,镜头还需满足光源要求,才能获取全部的图像信息。需 要考虑光源的波长、光谱范围、以及光源的种类是红外还是紫外等等。 FOV 32
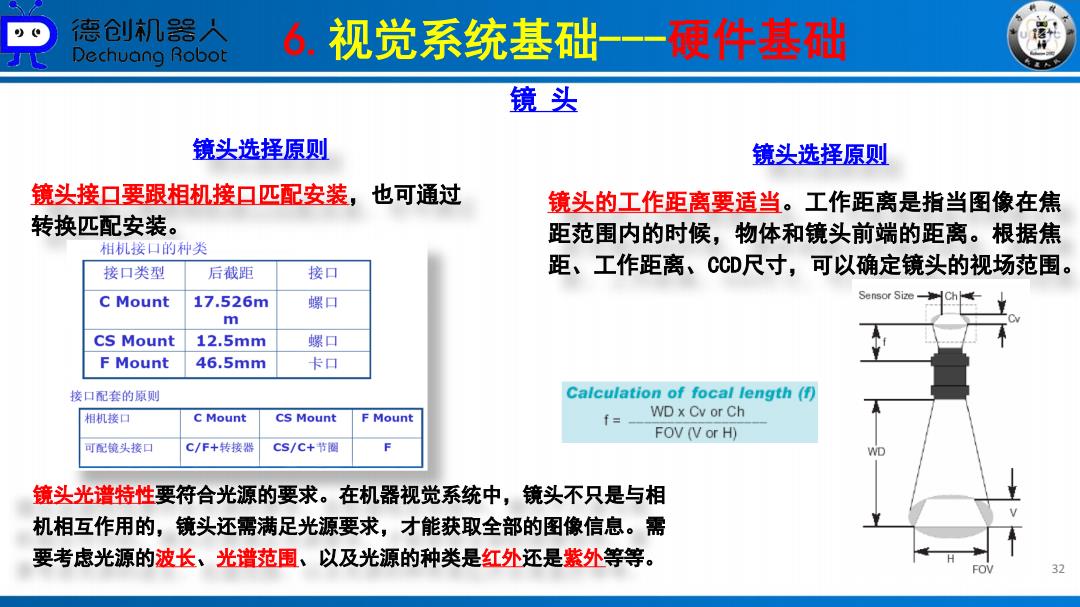
6.视觉系统基础---硬件基础 32 镜 头 镜头选择原则 镜头接口要跟相机接口匹配安装,也可通过 转换匹配安装。 镜头选择原则 镜头的工作距离要适当。工作距离是指当图像在焦 距范围内的时候,物体和镜头前端的距离。根据焦 距、工作距离、CCD尺寸,可以确定镜头的视场范围。 镜头光谱特性要符合光源的要求。在机器视觉系统中,镜头不只是与相 机相互作用的,镜头还需满足光源要求,才能获取全部的图像信息。需 要考虑光源的波长、光谱范围、以及光源的种类是红外还是紫外等等
德仓创机器人 Dechuang Robot 6.视觉系统基础 -一硬件基础 相机 相机通过镜头的光信号转换为电信号一电子图像,这是模拟信号;再通过/D转换器将模拟信号转换 成数字信号。 A/D 相机种类 CCD CCD摄像机称为电荷耦合器件,从图像半导体中出来的电子有组织地储存起来的方法: ·CM0$摄像机称为“互补金属氧化物半导体”,将晶体管放在硅块上的技术,将光敏元 件、放大器、AWD转换器、存储器、数字信号处理器和计算机接口控制电路集成在一 芯片 块硅片上,具有结构简单、处理功能多、速度快、耗电低、成本低等; ·CCD芯片采集速度快,CMOS较慢。CCD芯片的相机更加适合拍摄运动的物体,处理实时 运动对象。 CMOS 33
6.视觉系统基础---硬件基础 33 相 机 相机通过镜头的光信号转换为电信号——电子图像,这是模拟信号;再通过A/D转换器将模拟信号转换 成数字信号。 相机种类 芯片 CCD CMOS • CCD摄像机称为电荷耦合器件,从图像半导体中出来的电子有组织地储存起来的方法; • CMOS摄像机称为“互补金属氧化物半导体” ,将晶体管放在硅块上的技术,将光敏元 件、放大器、A/D转换器、存储器、数字信号处理器和计算机接口控制电路集成在一 块硅片上,具有结构简单、处理功能多、速度快、耗电低、成本低等; • CCD芯片采集速度快,CMOS较慢。CCD芯片的相机更加适合拍摄运动的物体,处理实时 运动对象
德仓创机器人 Dechuang Robot 6视觉系统基础 -一硬件基础 相机 相机种类 相机种类 模拟 。 模拟摄像机有PAL(黑白为CCIR), 面阵 中国,625行,50场;NTSC(黑白 相机 为E1A),日本,525行,60场: 信号 Proximity sensor SECAM;S-VIDEO分量传输; 格式 像素 数字摄像机有USB2.0、USB3.0、 排列 DCOM3、RS-644LVDS、Channel 数字 Link、Camera Link、千兆网。 线阵 相机 Encoder Sensor Page trigger Line trigger 34
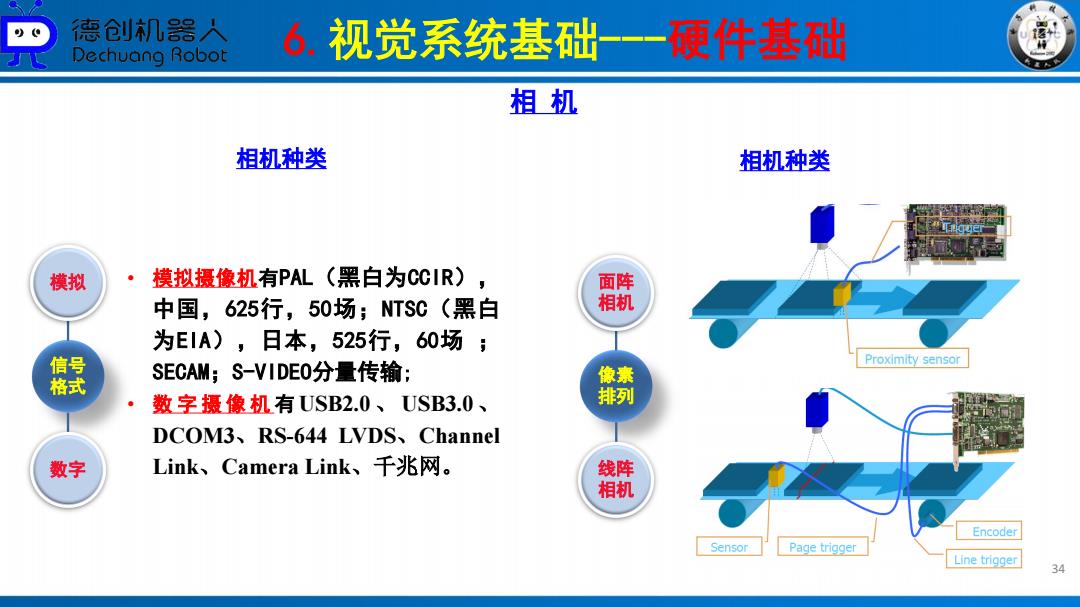
6.视觉系统基础---硬件基础 34 相 机 相机种类 信号 格式 模拟 数字 • 模拟摄像机有PAL(黑白为CCIR), 中国,625行,50场;NTSC(黑白 为EIA),日本,525行,60场 ; SECAM;S-VIDEO分量传输; • 数 字 摄 像 机 有 USB2.0 、 USB3.0 、 DCOM3、RS-644 LVDS、Channel Link、Camera Link、千兆网。 相机种类 像素 排列 面阵 相机 线阵 相机

德仓创机器人 Dechuang Robot 6.视觉系统基础--一硬件基础 产品型号 TRI500M TR1500C 传感器 逐行扫描CMOS 彩色/黑白 Mono RGB 分辨率 2592×1944 帧频 6fps 像素 像素深度 8Bit 像素大小 2.2um 白平衡 像素 深度 光学尺寸 1/2.5 曝光时间 80us-160us 相机 同步模式 连续模式/外触发 芯片 参数 分辨率 可调节参数 曝光时间、亮度、增益、白平衡 尺寸 输入输出 输入2路,带光耦隔离;输出4路,带光耦隔离 镜头接口 C▣或CS口 曝光 传输接口 IEEE 1394A 方式 帧率 传输距离 3m,最大可10m 供电要求 1394总线供电 支持协议 1394DCAM1.31 机械尺寸 52mm×52mm×48.8mm
6.视觉系统基础---硬件基础 35 相 机 相机参数 相机 参数 像素 像素 深度 分辨率 帧率 曝光 方式 芯片 尺寸 白平衡 • 像素:图像最小的完整采样。 • 像素深度:每像素数据的位数,一般常用的是8Bit,分辨率以乘法形式表现,如1024*668, “1024”表示屏幕上水平方向显示的点数, “668”表示垂直方向的点数。 • 帧率:相机采集传输图像的速率,面阵相机一般为每秒采集的帧数(Frames/Sec.),线 阵相机为每秒采集的行数(Hz) • 曝光方式与快门速度:线阵相机都是逐行曝光,可以选择固定行频和外触发同步的采集方 式,曝光时间可以与行周期一致,也可以设定一个固定的时间。面阵相机有帧曝光、场曝 光和滚动行曝光等几种常见方式,数字相机一般都提供外触发采图的功能。 • 光谱响应特性:指像元传感器对不同光波的敏感特性,一般响应范围是350nm-1000nm。一 些相机在靶面前加了一个滤镜,滤除红外光线。 • 芯片尺寸:型号为“1/1.8”的CCD或CMOS,表示其成像面积与一根直径为1 /1.8英寸的光 导摄像管的成像靶面面积近似。光导摄像管的直径与CCD/CMOS成像靶面面积之间没有固定 的换算公式,CCD /CMOS成像靶面的对角线长度大约相当于光导摄像管直径长度的2/3。 • 白平衡:无论环境光线如何,仍然把“白”定义为“白”的一种功能。由于CCD传感器本 身没有这种功能,因此就有必要对它输出的信号进行一定的修正,这种修正就叫做工业相 机的白平衡。 产品型号 TRI500M TRI500C 传感器 逐行扫描CMOS 彩色/黑白 Mono RGB 分辨率 2592×1944 帧频 6fps 像素深度 8Bit 像素大小 2.2um 光学尺寸 1/2.5 曝光时间 80us—160us 同步模式 连续模式/外触发 可调节参数 曝光时间、亮度、增益、白平衡 输入输出 输入2路,带光耦隔离;输出4路,带光耦隔离 镜头接口 C口或CS口 传输接口 IEEE 1394A 传输距离 3m,最大可10m 供电要求 1394总线供电 支持协议 1394 DCAM 1.31 机械尺寸 52mm×52mm×48.8mm

德仓创机器人 Dechuang Robot 6.视觉系统基础 -一硬件基础 图像采集卡 图像采集卡是图像采集部分和处理部分的接口,将摄像机的图像视频信号送到计算机的内存,供计算机处理、存 储、显示和传输等使用。主要参数有A/D转换、传输通道数(Channel)、分辨率、采样频率、传输速率、图像格 式(像素格式)、输出接口等。现代中低速视觉系统一般采用USB3.0等数据总线传输图像。 IEEE1394 PCI CARD 36
6.视觉系统基础---硬件基础 36 图像采集卡 图像采集卡是图像采集部分和处理部分的接口,将摄像机的图像视频信号送到计算机的内存,供计算机处理、存 储、显示和传输等使用。主要参数有A/D转换、传输通道数(Channel)、分辨率、采样频率、传输速率、图像格 式(像素格式)、输出接口等。现代中低速视觉系统一般采用USB3.0等数据总线传输图像