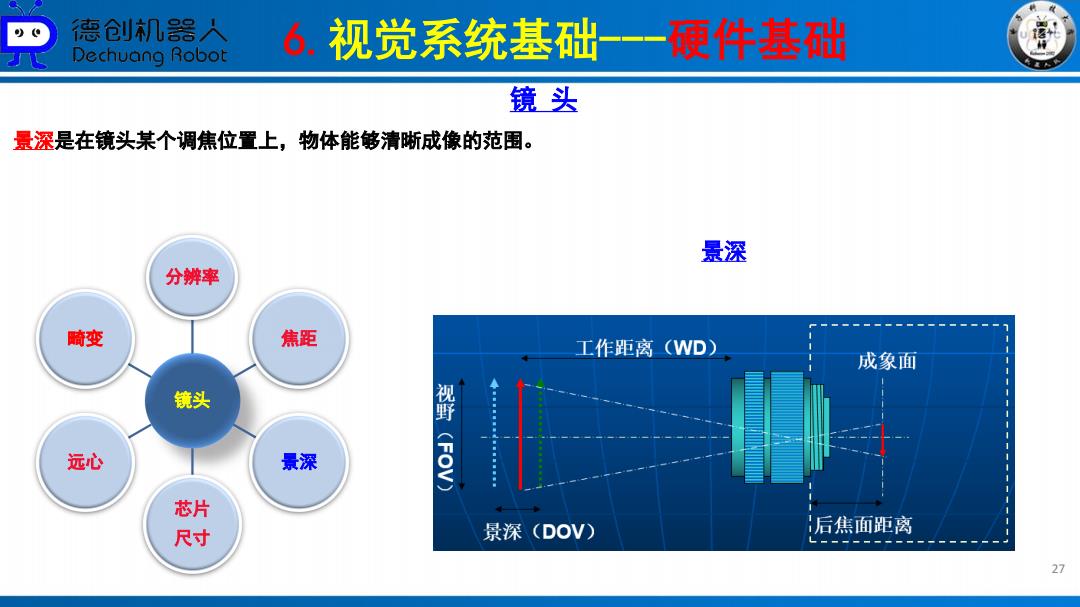
德仓创机器人 Dechuang Robot 6.视觉系统基础 -一硬件基础 镜头 景深是在镜头某个调焦位置上,物体能够清晰成像的范围。 景深 分辨率 畸变 焦距 工作距离(WD) 成象面 镜头 远心 景深 视野(FOV) 芯片 尺寸 景深(DOV) 后焦面距离 27
6.视觉系统基础---硬件基础 27 景深是在镜头某个调焦位置上,物体能够清晰成像的范围。 镜 头 镜头 分辨率 焦距 景深 芯片 尺寸 远心 畸变 景深

9g 德仓创机器人 Dechuang Robot 6.视觉系统基础 硬件基础 镜头 镜头焦距是从镜片中心到底片或CCD等成像平面的距离,其长短决定着视场角的大小,焦距越短,视场角就越大,观 察范围也越大,但远物体不清楚;焦距越长,视场角就越小,观察范围也越小,很远的物体也能看清楚,短焦距的光 学系统比长焦距的光学系统有更佳聚集光的能力。 镜头焦距 分辨率 畸变 焦距 工作距离(WD) 成象面 镜头 远心 景深 视野(FOV) 芯片 后焦面距离 尺寸 景深(DOV) 28
6.视觉系统基础---硬件基础 28 镜头焦距是从镜片中心到底片或CCD等成像平面的距离,其长短决定着视场角的大小,焦距越短,视场角就越大,观 察范围也越大,但远物体不清楚;焦距越长,视场角就越小,观察范围也越小,很远的物体也能看清楚,短焦距的光 学系统比长焦距的光学系统有更佳聚集光的能力。 镜 头 镜头 分辨率 焦距 景深 芯片 尺寸 远心 畸变 镜头焦距
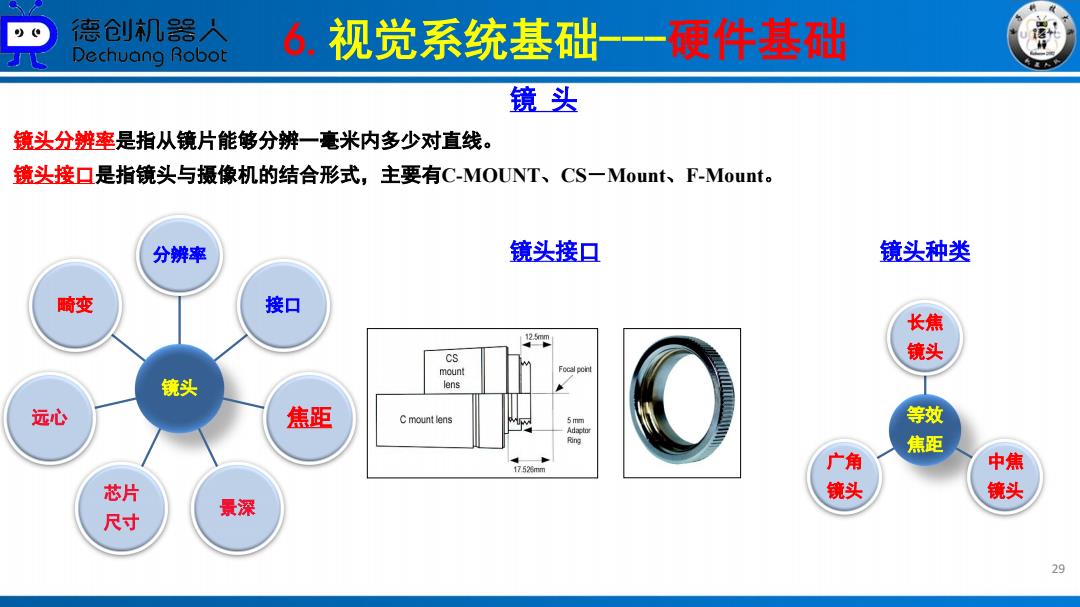
德仓创机器人 Dechuang Robot 6.视觉系统基础 一一硬件基础 镜头 镜头分辨率是指从镜片能够分辨一毫米内多少对直线。 镜头接口是指镜头与摄像机的结合形式,主要有C-MOUNT、CS一Mount、F-Mount。 分辨率 镜头接口 镜头种类 畸变 接口 长焦 CS 镜头 mount 镜头 lens 远心 焦距 C mount lens 5mm 等效 Ad年to 焦距 17.523mm 广角 中焦 芯片 镜头 镜头 景深 尺寸 29
6.视觉系统基础---硬件基础 29 镜头分辨率是指从镜片能够分辨一毫米内多少对直线。 镜 头 镜头 分辨率 接口 焦距 景深 芯片 尺寸 远心 畸变 镜头接口 镜头接口是指镜头与摄像机的结合形式,主要有C-MOUNT、CS-Mount、F-Mount。 镜头种类 等效 焦距 长焦 镜头 中焦 镜头 广角 镜头
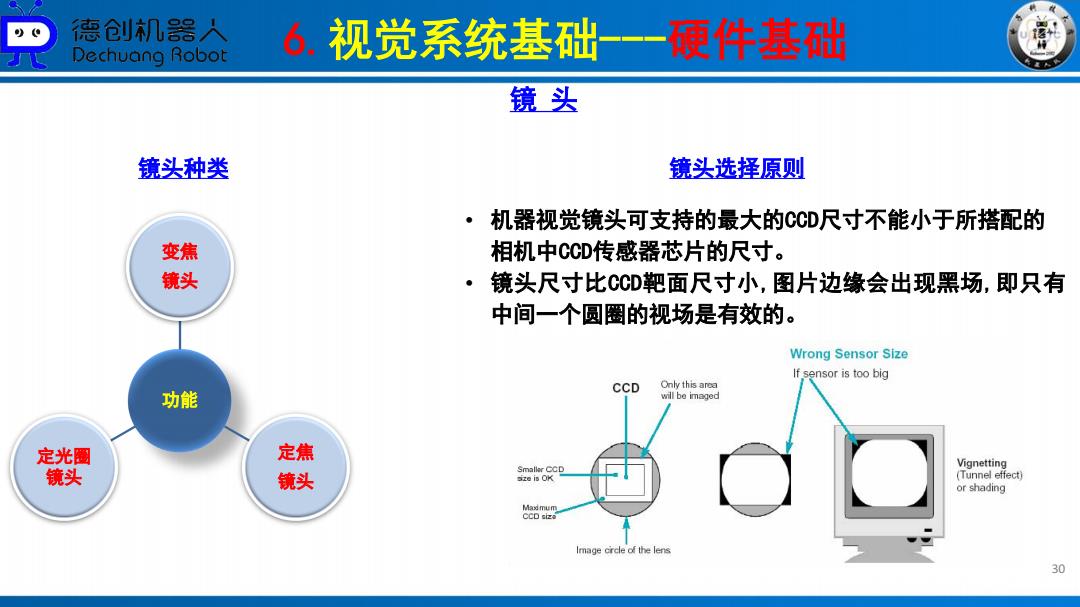
德仓创机器人 Dechuang Robot 6.视觉系统基础--一硬件基础 镜头 镜头种类 镜头选择原则 ·机器视觉镜头可支持的最大的CCD尺寸不能小于所搭配的 变焦 相机中CCD传感器芯片的尺寸。 镜头 。 镜头尺寸比CCD靶面尺寸小,图片边缘会出现黑场,即只有 中间一个圆圈的视场是有效的。 Wrong Sensor Size If sensor is too big CCD Only this area 功能 will be imaged 定光圈 定焦 Smaller CCD Vignetting 镜头 镜头 size is OK (Tunnel effect) or shading Image crcle of the lens 30
6.视觉系统基础---硬件基础 30 镜 头 镜头种类 功能 变焦 镜头 定焦 镜头 定光圈 镜头 镜头选择原则 • 机器视觉镜头可支持的最大的CCD尺寸不能小于所搭配的 相机中CCD传感器芯片的尺寸。 • 镜头尺寸比CCD靶面尺寸小,图片边缘会出现黑场,即只有 中间一个圆圈的视场是有效的
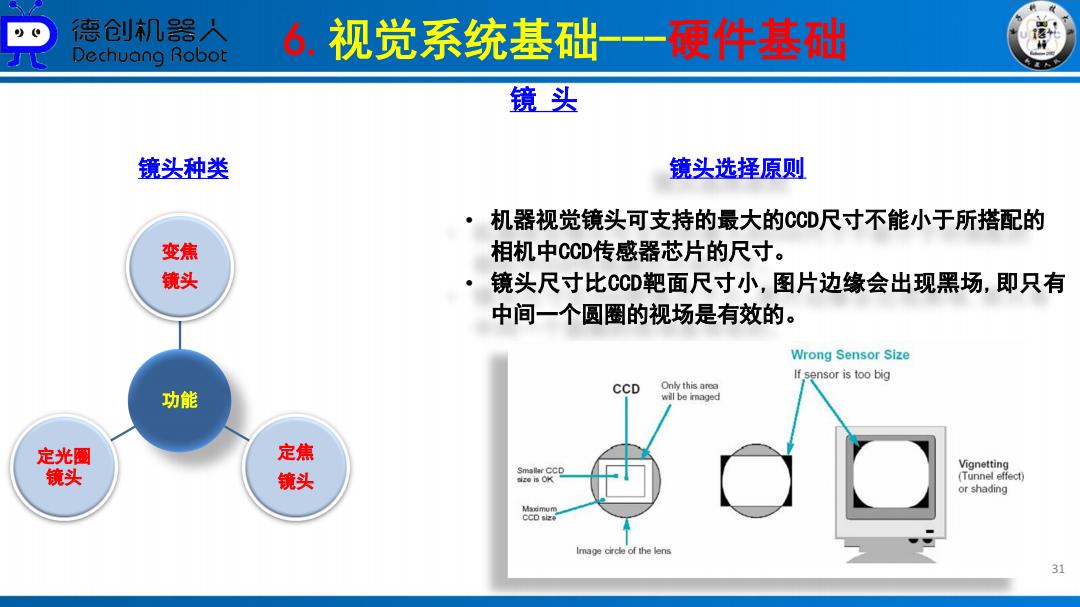
德仓创机器人 Dechuang Robot 6.视觉系统基础--一硬件基础 镜头 镜头种类 镜头选择原则 ·机器视觉镜头可支持的最大的CCD尺寸不能小于所搭配的 变焦 相机中CCD传感器芯片的尺寸。 镜头 。 镜头尺寸比CCD靶面尺寸小,图片边缘会出现黑场,即只有 中间一个圆圈的视场是有效的。 Wrong Sensor Size If sensor is too big 功能 CCD Only this area will be iraged 定光圈 定焦 Vignetting 镜头 镜头 Smallar CCD size is OK (Tunnel effect) or shading CCD size Image circle of the lens 31
6.视觉系统基础---硬件基础 31 镜 头 镜头种类 功能 变焦 镜头 定焦 镜头 定光圈 镜头 镜头选择原则 • 机器视觉镜头可支持的最大的CCD尺寸不能小于所搭配的 相机中CCD传感器芯片的尺寸。 • 镜头尺寸比CCD靶面尺寸小,图片边缘会出现黑场,即只有 中间一个圆圈的视场是有效的