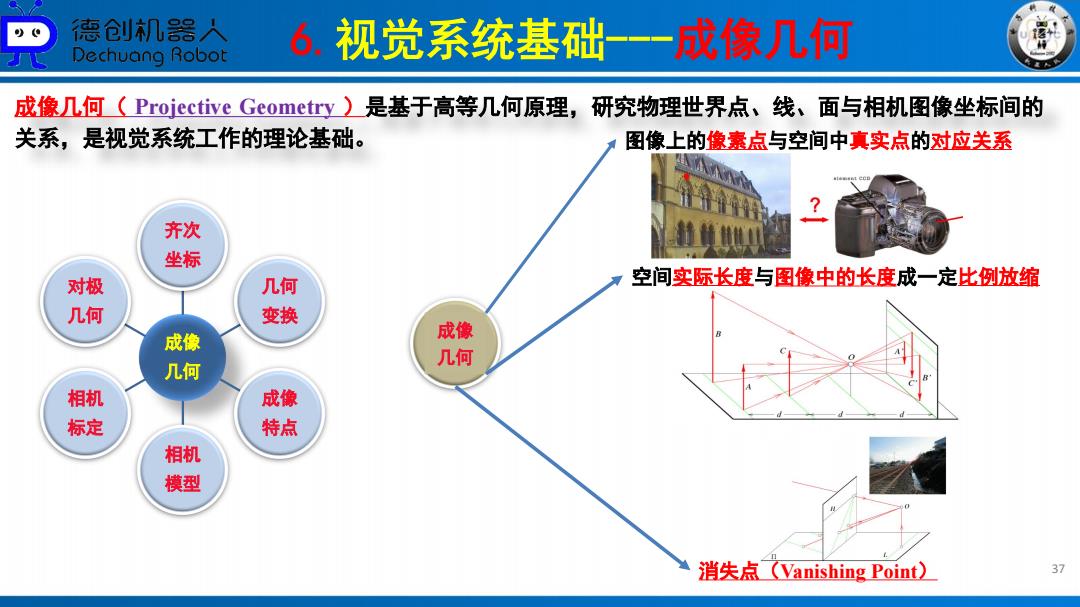
0 德仓创机器人 Dechuang Robot 6.视觉系统基础 一一成像几何 成像几何(Projective Geometry)是基于高等几何原理,研究物理世界点、线、i 面与相机图像坐标间的 关系,是视觉系统工作的理论基础。 图像上的像素点与空间中真实点的对应关系 齐次 坐标 对极 几何 空间实际长度与图像中的长度成一定比例放缩 几何 变换 成像 成像 几何 几何 相机 成像 标定 特点 相机 模型 消失点(Vanishing Point) 37
6.视觉系统基础---成像几何 37 成像 几何 齐次 坐标 几何 变换 成像 特点 相机 模型 相机 标定 对极 几何 成像几何( Projective Geometry )是基于高等几何原理,研究物理世界点、线、面与相机图像坐标间的 关系,是视觉系统工作的理论基础。 图像上的像素点与空间中真实点的对应关系 空间实际长度与图像中的长度成一定比例放缩 成像 几何 消失点(Vanishing Point)
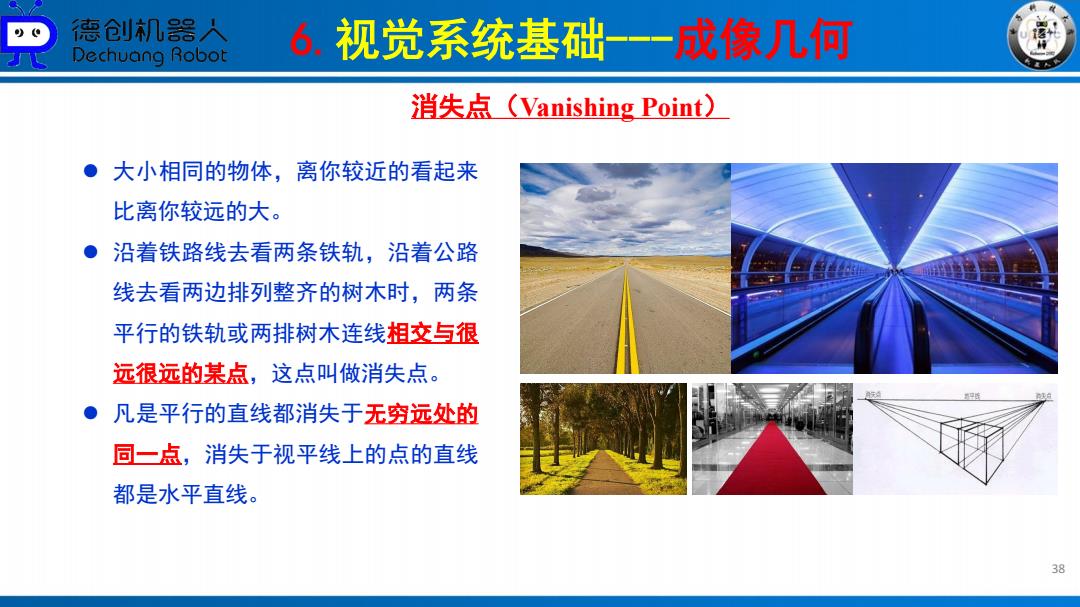
德仓创机器人 6.视觉系统基础-一一成像几何 州 Dechuang Robot 逍失点(Vanishing Point) ●大小相同的物体,离你较近的看起来 比离你较远的大。 ●沿着铁路线去看两条铁轨,沿着公路 线去看两边排列整齐的树木时,两条 平行的铁轨或两排树木连线相交与很 远很远的某点,这点叫做消失点。 ●凡是平行的直线都消失于无穷远处的 同一点,消失于视平线上的点的直线 都是水平直线。 38
6.视觉系统基础---成像几何 38 消失点(Vanishing Point) 大小相同的物体,离你较近的看起来 比离你较远的大。 沿着铁路线去看两条铁轨,沿着公路 线去看两边排列整齐的树木时,两条 平行的铁轨或两排树木连线相交与很 远很远的某点,这点叫做消失点。 凡是平行的直线都消失于无穷远处的 同一点,消失于视平线上的点的直线 都是水平直线
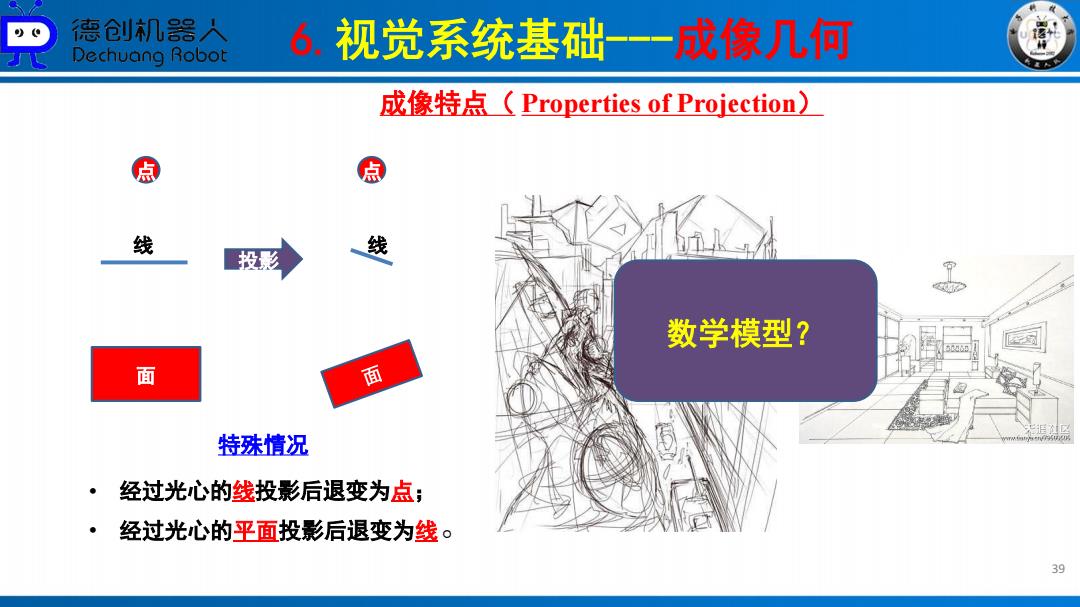
德仓创机器人 Dechuang Robot 6.视觉系统基础-一一成像几何 成像特点(Properties of Projection) 点 点 线 投影 线 数学模型? 面 面 特殊情况 经过光心的线投影后退变为点; ·经过光心的平面投影后退变为线。 39
6.视觉系统基础---成像几何 39 成像特点( Properties of Projection) 特殊情况 • 经过光心的线投影后退变为点; • 经过光心的平面投影后退变为线。 点 面 投影 点 线 线 数学模型?
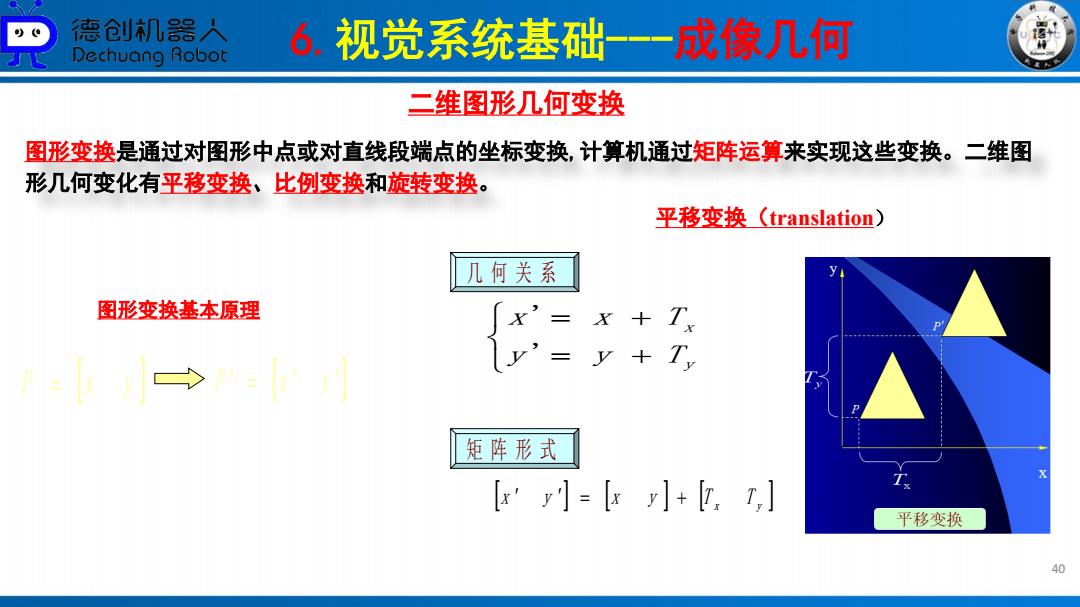
90 德仓创机器人 Dechuang Robot 6.视觉系统基础 一一成像几何 二维图形几何变换 图形变换是通过对图形中点或对直线段端点的坐标变换,计算机通过矩阵运算来实现这些变换。二维图 形几何变化有平移变换、比例变换和旋转变换。 平移变换(translation) 何关系 y 图形变换基本原理 → +T, 矩阵形式 ['y小=[xy]+T,] 平移变换 40
6.视觉系统基础---成像几何 40 二维图形几何变换 图形变换是通过对图形中点或对直线段端点的坐标变换,计算机通过矩阵运算来实现这些变换。二维图 形几何变化有平移变换、比例变换和旋转变换。 P x y P x y 图形变换基本原理 平移变换(translation) y x y y T x x T ' ' 几何关系 x y x y x y T T 矩阵形式
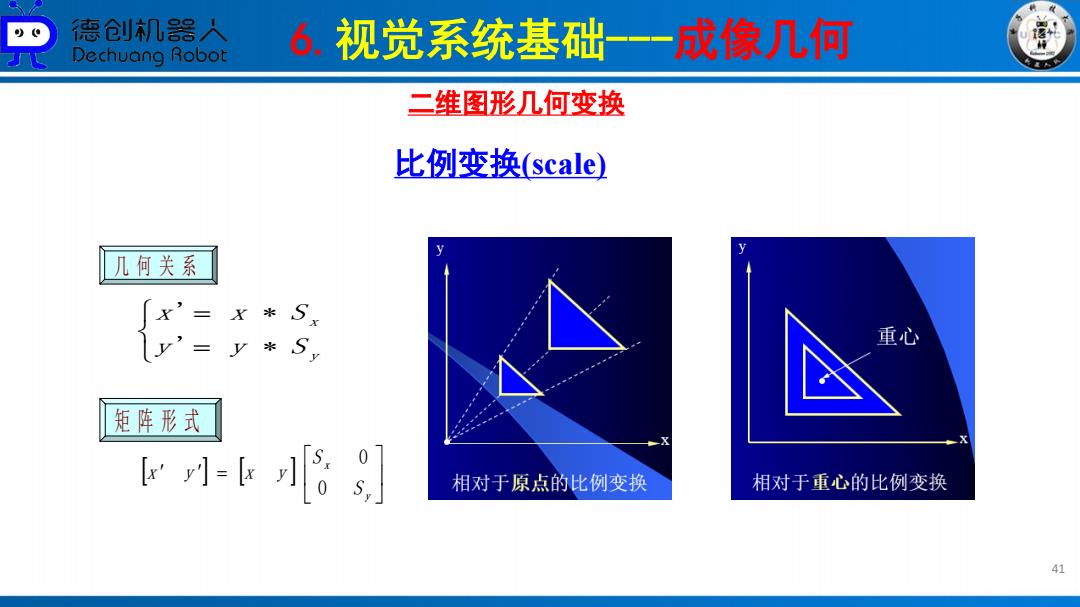
德仓创机器人 Dechuang Robot 6.视觉系统基础 一一成像几何 二维图形几何变换 比例变换scale) 几何关系 x’= X *S, 重心 矩阵形式 k8 相对于原点的比例变换 相对于重心的比例变换 41
6.视觉系统基础---成像几何 41 二维图形几何变换 比例变换(scale) y x y y S x x S ' ' 几何关系 y x S S x y x y 0 0 矩阵形式