德仓创机器人 Dechuang Robot 6.视觉系统基础--一 硬件基础 光源 优点 ● 镜面表面被照亮 强调表面纹理 。倾斜表面发暗 相机 应用场合 镜头 ● 高反光物体表面划伤、 气泡等缺陷检测 同轴光源 Mark点定位 。二维码识别 被测物 。尺寸测量 同轴光 。字符识别 ● 五金件定位 22
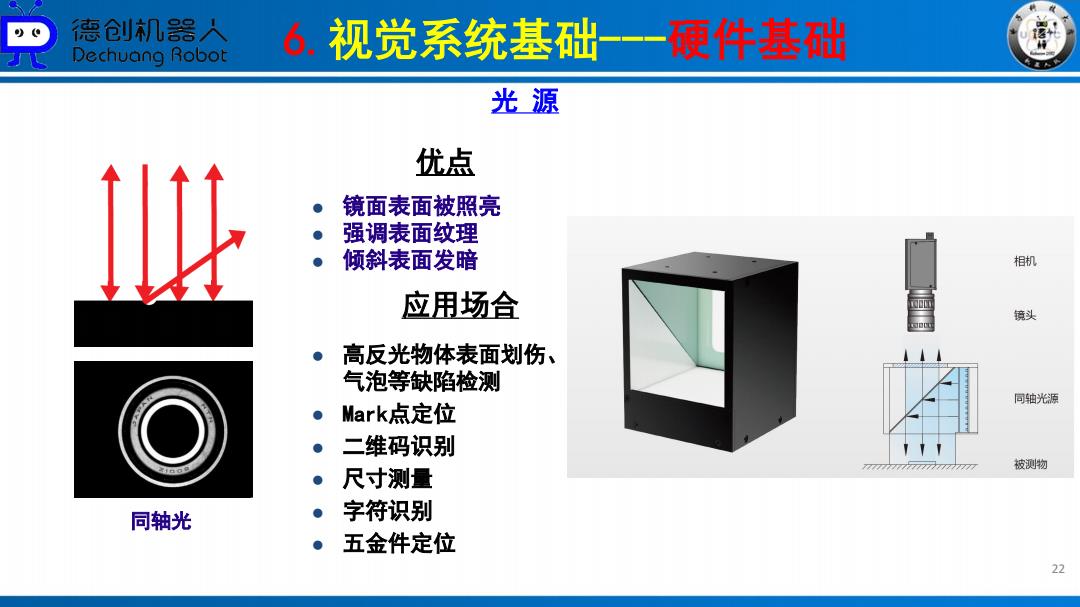
6.视觉系统基础---硬件基础 22 光 源 优点 镜面表面被照亮 强调表面纹理 倾斜表面发暗 应用场合 高反光物体表面划伤、 气泡等缺陷检测 Mark点定位 二维码识别 尺寸测量 字符识别 五金件定位 同轴光

德仓创机器人 Dechuang Robot 6.视觉系统基础-一 硬件基础 光源 光源匹配与效果 漫射无影光 高角度与低角度效果比較 ,8 OK 0 6 1- 2xbe 03 4cm 05g0 MNo6 7PORS Bruv WxYz9 6000-00 + 0 。# IM口N 23
6.视觉系统基础---硬件基础 23 光源匹配与效果 光 源
德仓创机器人 Dechuang Robot 6.视觉系统基础--一硬件基础 光源 光源匹配与效果 光源选择原则 圆环表面亮度均匀照明 O⊙O 胶图反光角度连续大范围 1.相机光谱响应特性; 变化,单方向凰光图像均 匀性很差,用多角度独立 控制组合光源,可以调出 2.LED的颜色、反光角度、亮度、寿命等; 比较理想的效果,缺路也 比较明显, 3.物品形状与LED形状; 平行光原作背光 4.打光方式; 5.辅助手段(偏光镜、滤光镜、漫反射板等)。 平行光配合远心镜头可以有效去除边峰发虚的间题 发啦不一定会导致测量结果不精确,要着其稳定性 24 精确与准商的区别1
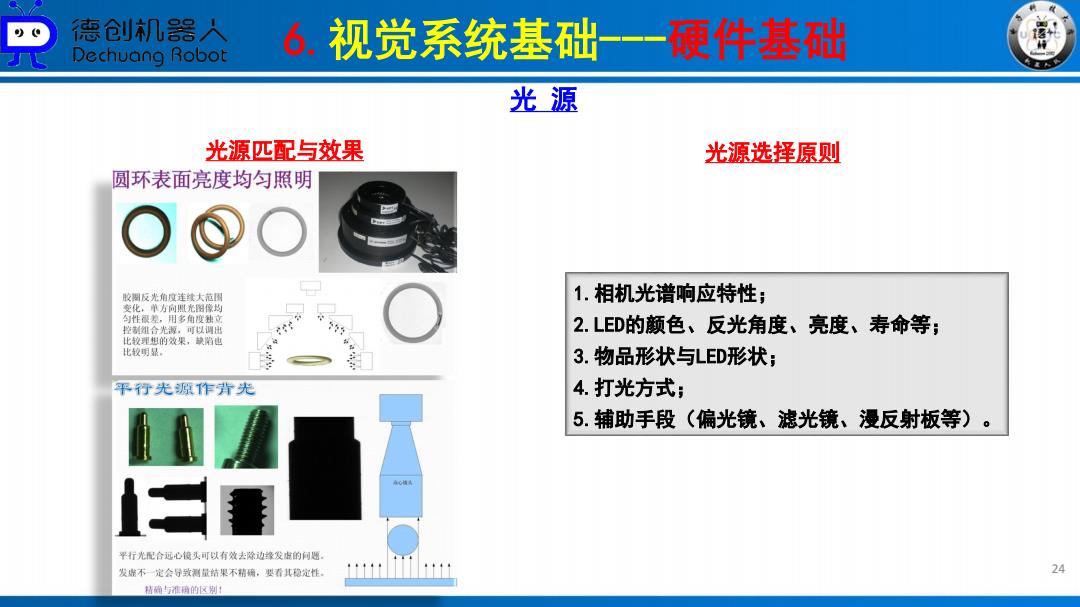
6.视觉系统基础---硬件基础 24 光源匹配与效果 光 源 1.相机光谱响应特性; 2.LED的颜色、反光角度、亮度、寿命等; 3.物品形状与LED形状; 4.打光方式; 5.辅助手段(偏光镜、滤光镜、漫反射板等)。 光源选择原则
德仓创机器人 Dechuang Robot 6.视觉系统基础 硬件基础 镜头 镜头是集聚光线,使成像单元能获得清晰影像的结构。光学镜头有监控级和工业级两种,监控级镜头主要适用于图像 质量不高、价格较低的应用场合;工业级镜头由于图像质量好、畸变小、价格高,主要应用于工业零件检测和科学研 究等应用场合。 镜头尺寸容纳相机靶面 分辨率 Wrong Sensor Size If sensor is too big 畸变 焦距 CCD Only this area will be imaged 镜头 Vignetting Smaller CCD 2海s0K (Tunnel effect) 远心 景深 or shading CCD size 芯片 Image circle of the lens 尺寸 25
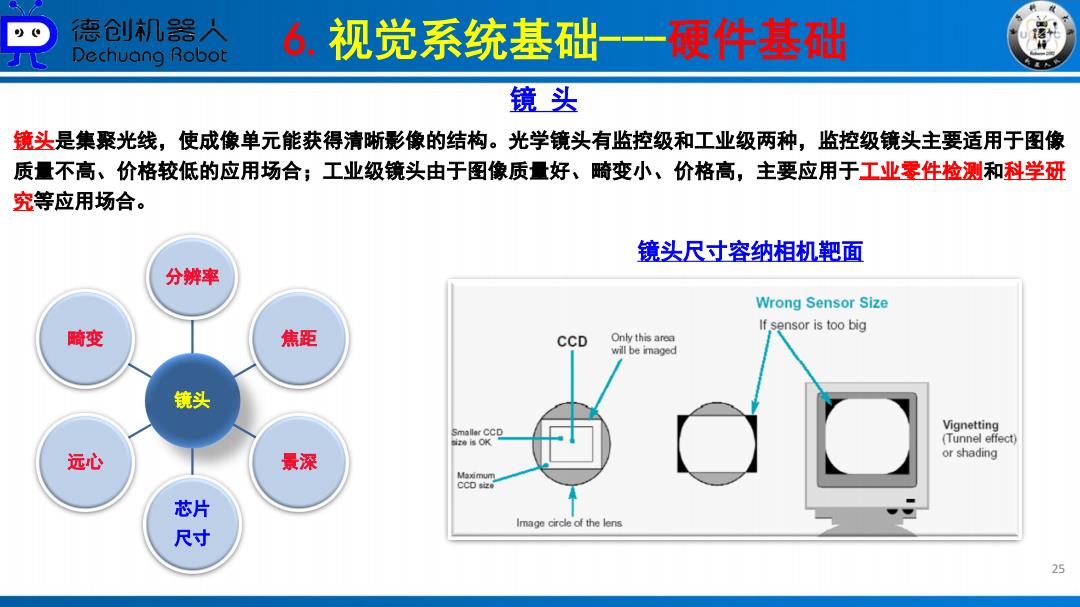
6.视觉系统基础---硬件基础 25 镜头是集聚光线,使成像单元能获得清晰影像的结构。光学镜头有监控级和工业级两种,监控级镜头主要适用于图像 质量不高、价格较低的应用场合;工业级镜头由于图像质量好、畸变小、价格高,主要应用于工业零件检测和科学研 究等应用场合。 镜 头 镜头 分辨率 焦距 景深 芯片 尺寸 远心 畸变 镜头尺寸容纳相机靶面
德仓创机器人 Dechuang Robot 6.视觉系统基础-一 硬件基础 镜头 镜头畸变是由于镜头几何误差导致的图像范围内不同位置上的放大率存在的差异,主要包括径向畸变和切向畸变,有 枕形或桶形失真。 镜头畸变 分辨率 畸变 焦距 镜头 远心 景深 桶形畸变 枕形畸变 芯片 尺寸 26
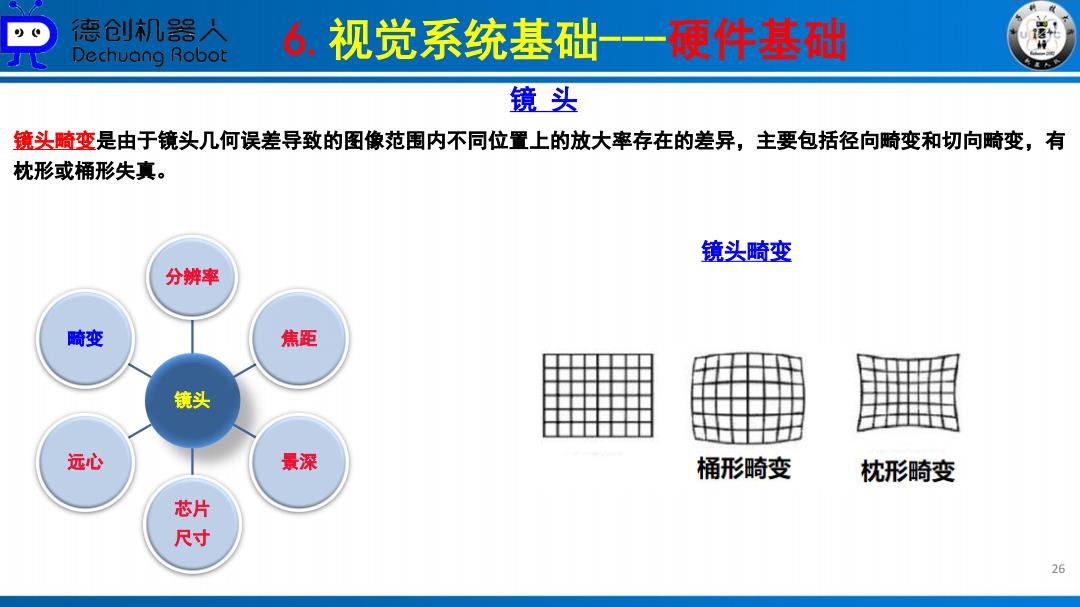
6.视觉系统基础---硬件基础 26 镜头畸变是由于镜头几何误差导致的图像范围内不同位置上的放大率存在的差异,主要包括径向畸变和切向畸变,有 枕形或桶形失真。 镜 头 镜头 分辨率 焦距 景深 芯片 尺寸 远心 畸变 镜头畸变