德仓创机器人 Dechuang Robot 6.视觉系统基础--一 硬件基础 光源 优点 0 通用用途 2002-520 设置容易 1234010868 /ALP 10250 作用 热点落在光亮的表面 可以过滤小的阴影部分 亮视场 17
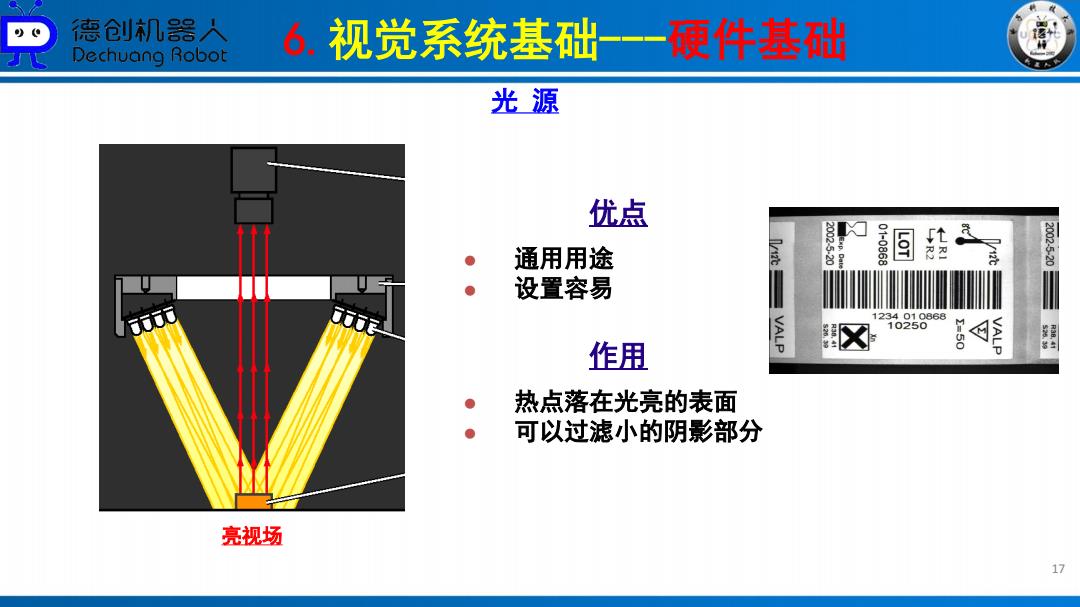
6.视觉系统基础---硬件基础 17 光 源 亮视场 优点 通用用途 设置容易 作用 热点落在光亮的表面 可以过滤小的阴影部分
德仓创机器人 Dechuang Robot 6.视觉系统基础-一 硬件基础 光源 优点 强调高速变化 ● 漫射表面被照亮 Eklind ● 镜面表面发暗 MADE IN USA 暗视场 18
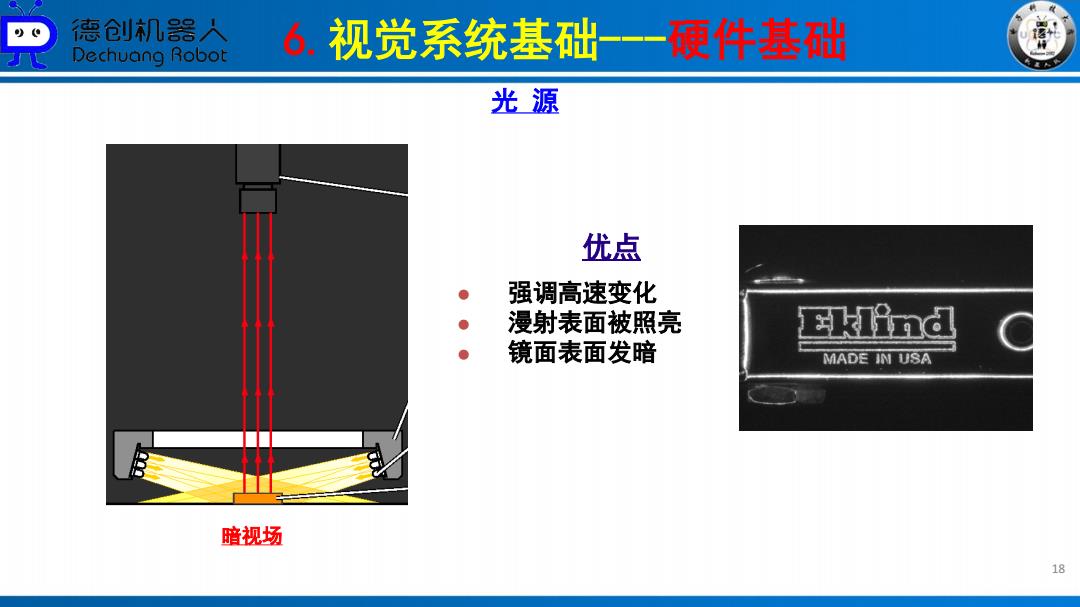
6.视觉系统基础---硬件基础 18 光 源 暗视场 优点 强调高速变化 漫射表面被照亮 镜面表面发暗
0 德仓创机器人 Dechuang Robot 6.视觉系统基础--一 硬件基础 光源 优点 清晰的边缘过渡 通常用于高对比度图像 ● 表面光亮度、颜色以及无高度差 ● 用于测量应用 背光 19
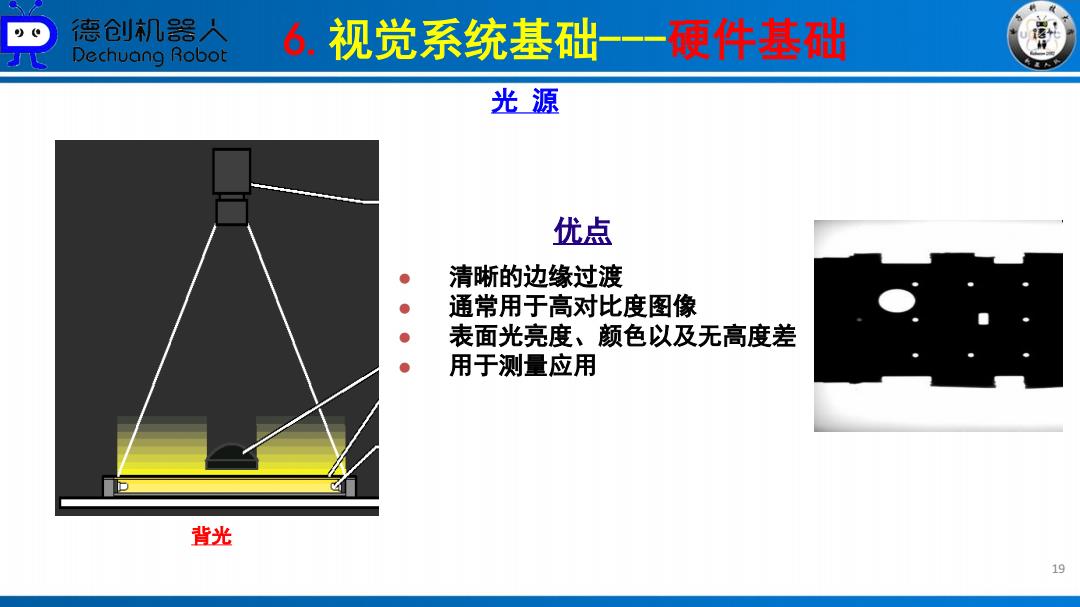
6.视觉系统基础---硬件基础 19 光 源 背光 优点 清晰的边缘过渡 通常用于高对比度图像 表面光亮度、颜色以及无高度差 用于测量应用
德仓创机器人 Dechuang Robot 6.视觉系统基础-一 硬件基础 光源 褶皱铝箔 优点 : 忽略表面纹理特征 EXP JUL95 用于不平坦表面 环光 碗状光源 碗状光源 20
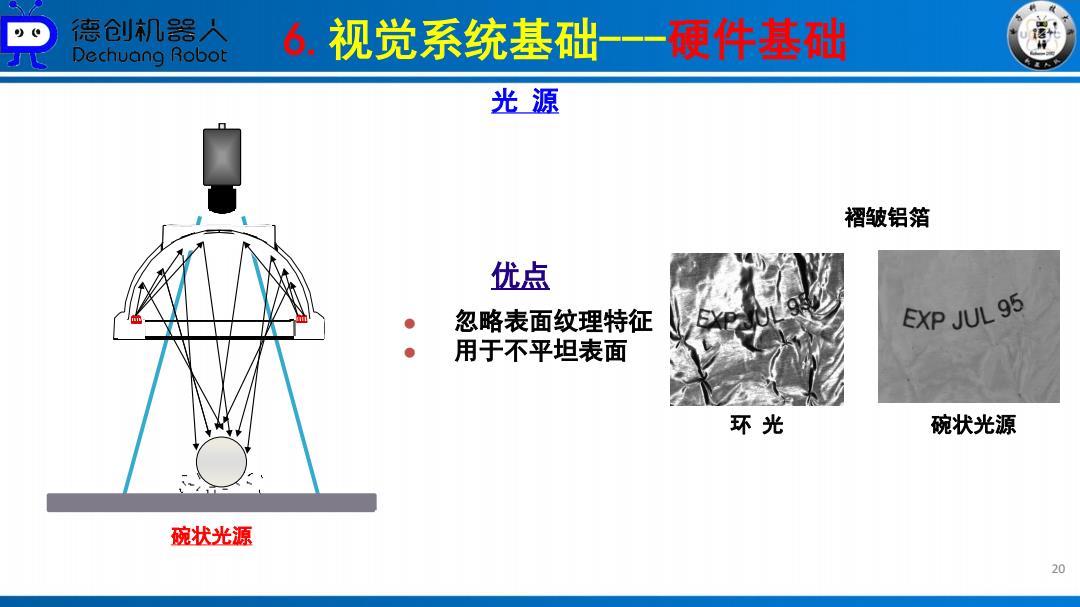
6.视觉系统基础---硬件基础 20 光 源 碗状光源 优点 忽略表面纹理特征 用于不平坦表面 环 光 碗状光源 褶皱铝箔
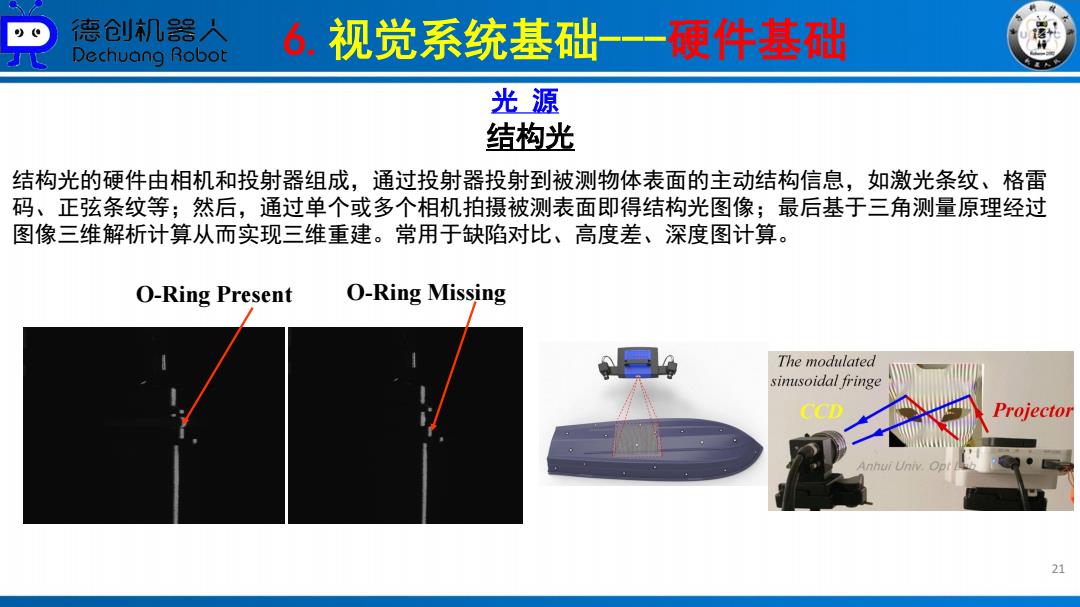
德仓创机器人 Dechuang Robot 6.视觉系统基础--一 硬件基础 光源 结构光 结构光的硬件由相机和投射器组成,通过投射器投射到被测物体表面的主动结构信息,如激光条纹、格雷 码、正弦条纹等;然后,通过单个或多个相机拍摄被测表面即得结构光图像;最后基于三角测量原理经过 图像三维解析计算从而实现三维重建。常用于缺陷对比、高度差、深度图计算。 O-Ring Present O-Ring Missing The modulated sinusoidal fringe CCD Projector Anhui Univ.Op 21
6.视觉系统基础---硬件基础 21 光 源 O-Ring Present O-Ring Missing 结构光 结构光的硬件由相机和投射器组成,通过投射器投射到被测物体表面的主动结构信息,如激光条纹、格雷 码、正弦条纹等;然后,通过单个或多个相机拍摄被测表面即得结构光图像;最后基于三角测量原理经过 图像三维解析计算从而实现三维重建。常用于缺陷对比、高度差、深度图计算