
德仓创机器人 Dechuang Robot 6.视觉系统基础 实验心理学家赤瑞特拉实验证明人类大约83%的外部世界信息是通过眼睛获取,11%的外部世界信息是通过耳朵获取。 视觉与语音成为人类理解世界和与外部世界交流的主要渠道,也成为智能机器人研究的最核心的关键技术。机器视觉 与语音技术的性能与智能化程度决定智能机器人的智能化程度。 信息量获取比例 3.50% 1.50%1% 机器视觉是通过光学的、非接触传感器自动地获取和解释处理一个真实物 体的图像,以获取所需信息或用于控制机器运动或过程,涉及数字图像处理技 11 术、模式识别、自动控制、光源和光学成像知识、模拟与数字视频技术、计算 机软硬件和人机接口等多学科理论和技术。 机器视觉主要研究利用计算机来模拟人的视觉功能,采用一个或多个摄像 机抓拍客观事物的实际图像,经过数字化等一系列处理提取需要的特征信息 ,然后加以理解并通过逻辑运算最终实现工业生产和科学研究中的检测、测 量和控制等功能。一个典型的机器视觉应用系统包括光源、光学镜头 83% 摄像机、图像采集卡、图像处理系统(或平台)、机器视觉软件模块、输入输 出和控制热行模块等部件 ■视觉■听觉·嗅觉■触觉·味觉 12
6.视觉系统基础 12 实验心理学家赤瑞特拉实验证明人类大约83%的外部世界信息是通过眼睛获取,11%的外部世界信息是通过耳朵获取。 视觉与语音成为人类理解世界和与外部世界交流的主要渠道,也成为智能机器人研究的最核心的关键技术。机器视觉 与语音技术的性能与智能化程度决定智能机器人的智能化程度。 机器视觉是通过光学的、非接触传感器自动地获取和解释处理一个真实物 体的图像,以获取所需信息或用于控制机器运动或过程,涉及数字图像处理技 术、模式识别、自动控制、光源和光学成像知识、模拟与数字视频技术、计算 机软硬件和人机接口等多学科理论和技术。 机器视觉主要研究利用计算机来模拟人的视觉功能,采用一个或多个摄像 机抓拍客观事物的实际图像,经过数字化等一系列处理提取需要的特征信息 ,然后加以理解并通过逻辑运算最终实现工业生产和科学研究中的检测、测 量和控制等功能。一个典型的机器视觉应用系统包括光源、光学镜头、 摄像机、图像采集卡、图像处理系统(或平台)、机器视觉软件模块、输入输 出和控制执行模块等部件
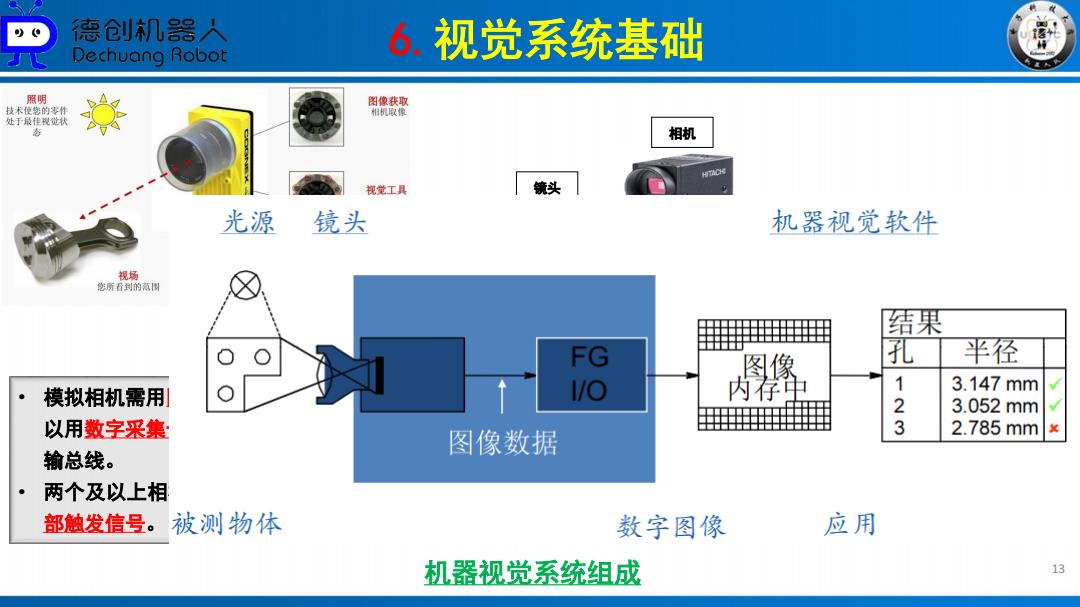
德仓创机器人 Dechuang Robot 6.视觉系统基础 照明 图像获取 技术使您的零 相枫取像 处于最桂视觉状 态 相机 视觉工具 镜头 光源镜头 机器视觉软件 视场 您所看到的意围 果 FG 图像 孔 半径 1 模拟相机需用 1/ 内荐单 3.147mm 2 3.052mm 以用数字采集 图像数据 2.785mm 输总线。 两个及以上相 部触发信号。被测物体 数字图像 应用 机器视觉系统组成 13
6.视觉系统基础 13 电 脑 系 统 图像采集卡 相机 镜头 光源 被测物 I/O控制 其他机械部分 供电及传输模拟图片信号 光源触发信号 其他动作信号 数字图像信号 与软件通讯 相机触发信号 USB供电及图像传输 • 模拟相机需用图像采集卡,数字相机可 以用数字采集卡、USB3.0等高速数字传 输总线。 • 两个及以上相机要严格同步工作需要外 部触发信号。 机器视觉系统组成
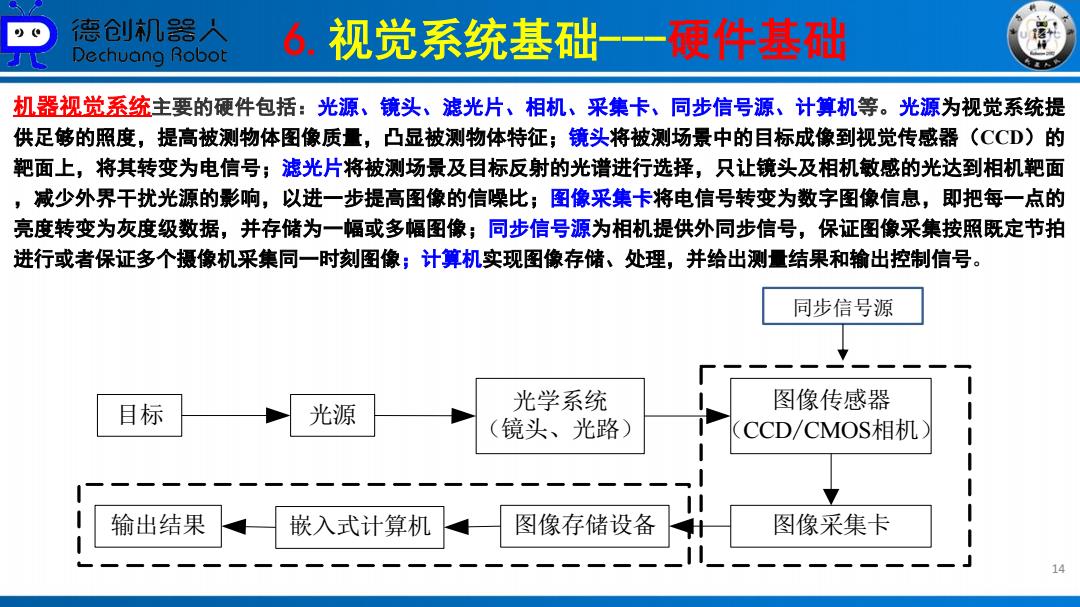
德仓创机器人 Dechuang Robot 6.视觉系统基础-一硬件基础 机器视觉系统主要的硬件包括:光源、镜头、滤光片、相机、采集卡、同步信号源、计算机等。光源为视觉系统提 供足够的照度,提高被测物体图像质量,凸显被测物体特征;镜头将被测场景中的目标成像到视觉传感器(CCD)的 靶面上,将其转变为电信号;滤光片将被测场景及目标反射的光谱进行选择,只让镜头及相机敏感的光达到相机靶面 ,减少外界干扰光源的影响,以进一步提高图像的信噪比;图像采集卡将电信号转变为数字图像信息,即把每一点的 亮度转变为灰度级数据,并存储为一幅或多幅图像;同步信号源为相机提供外同步信号,保证图像采集按照既定节拍 进行或者保证多个摄像机采集同一时刻图像;计算机实现图像存储、处理,并给出测量结果和输出控制信号。 同步信号源 目标 光源 光学系统 图像传感器 镜头、光路) CCD/CMOS相机, 输出结果 嵌入式计算机 图像存储设备 图像采集卡 14
6.视觉系统基础---硬件基础 14 机器视觉系统主要的硬件包括:光源、镜头、滤光片、相机、采集卡、同步信号源、计算机等。光源为视觉系统提 供足够的照度,提高被测物体图像质量,凸显被测物体特征;镜头将被测场景中的目标成像到视觉传感器(CCD)的 靶面上,将其转变为电信号;滤光片将被测场景及目标反射的光谱进行选择,只让镜头及相机敏感的光达到相机靶面 ,减少外界干扰光源的影响,以进一步提高图像的信噪比;图像采集卡将电信号转变为数字图像信息,即把每一点的 亮度转变为灰度级数据,并存储为一幅或多幅图像;同步信号源为相机提供外同步信号,保证图像采集按照既定节拍 进行或者保证多个摄像机采集同一时刻图像;计算机实现图像存储、处理,并给出测量结果和输出控制信号。 光学系统 (镜头、光路) 目标 光源 图像传感器 (CCD/CMOS相机) 输出结果 嵌入式计算机 图像存储设备 图像采集卡 同步信号源
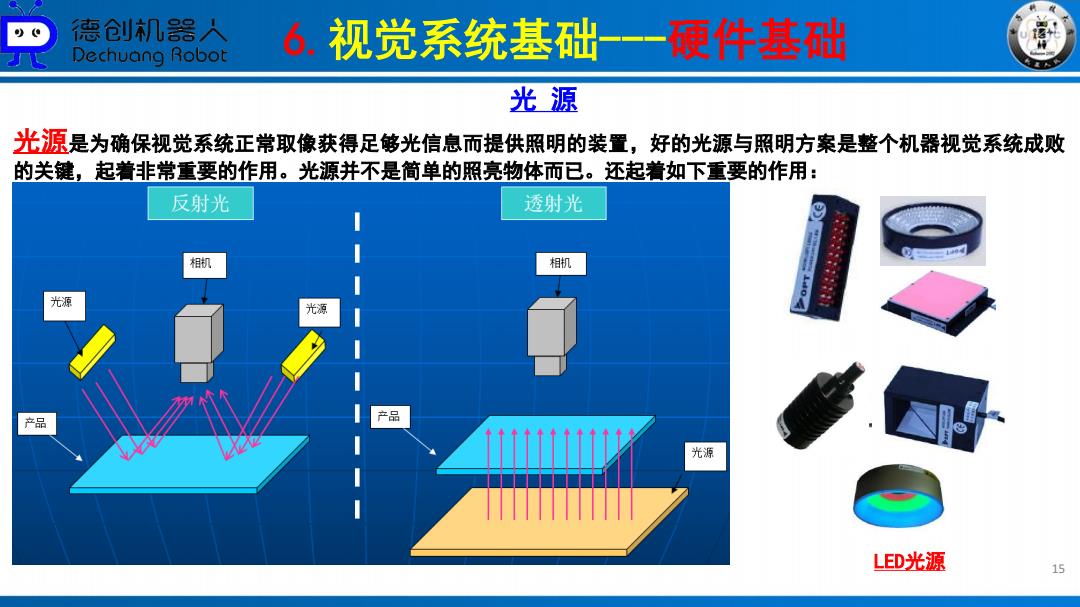
德仓创机器人 Dechuang Robot 6.视觉系统基础 -一硬件基础 光源 光源是为确保视觉系统正常取像获得足够光信息而提供照明的装置,好的光源与照明方案是整个机器视觉系统成败 的关键,起着非常重要的作用。光源并不是简单的照亮物体而已。还起着如下重要的作用: 反射光 透射光 巴 相机 相机 光源 光源 产品 品 光源 LED光源 15
6.视觉系统基础---硬件基础 15 光源是为确保视觉系统正常取像获得足够光信息而提供照明的装置,好的光源与照明方案是整个机器视觉系统成败 的关键,起着非常重要的作用。光源并不是简单的照亮物体而已。还起着如下重要的作用: • 光源与照明方案的配合应尽可能地突出物体特征量; • 将待测区域与背景明显区分开,增加对比度,消隐不感兴趣的部分; • 增强待测目标边缘清晰度; • 保持足够的整体亮度; • 物体位置的变化不应该影响成像的质量; • 适合的灯源可以提高系统检测精度、运行速度及工作效率; • 一般使用反射光与透射光; • 光源有萤光灯、卤素灯+光纤导管、LED光源、激光、红外、紫外等 其中LED红外、紫外、白光是现代机器视觉系统最常用的光源; • LED光源有:环形光、条形光、面板光、同轴光、点光源、线光源等。 光 源 LED光源
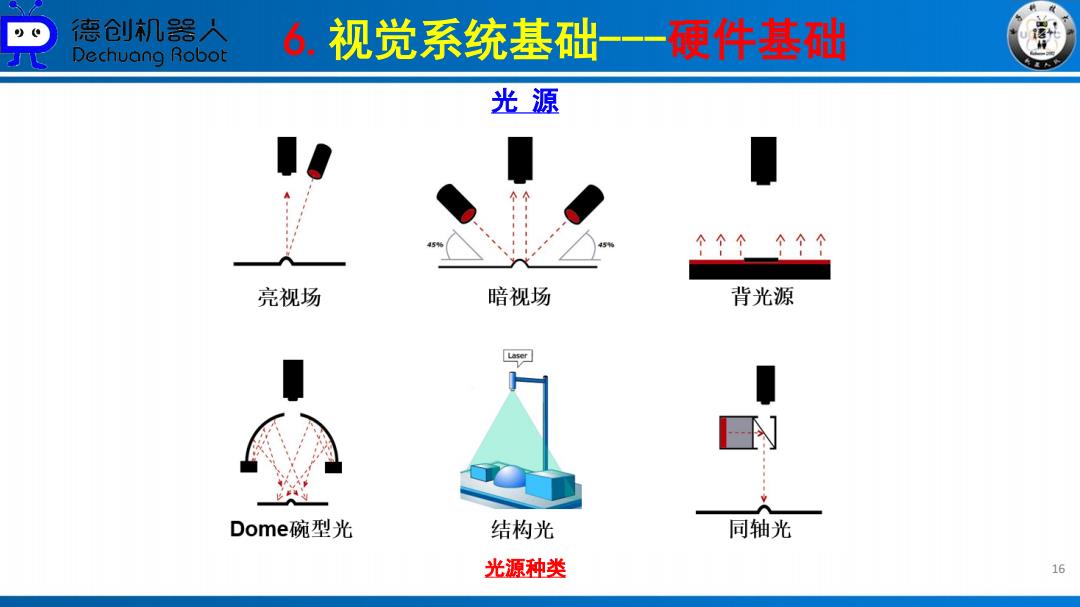
德仓创机器人 Dechuang Robot 6.视觉系统基础 -一硬件基础 光源 个个个 亮视场 暗视场 背光源 Lase Dome碗型光 结构光 同轴光 光源种类 16
6.视觉系统基础---硬件基础 16 光 源 光源种类