
德仓创机器人 Dechuang Robot 6.羽毛球机器人定位与视觉系统设计 航迹推算法定位一一编码器 绝对值编码器用来检测旋转运动的旋转角度。码盘上有许多道光通道刻线,每道刻线依次以2线、4线、8线、16线 。。。。。。编排,在编码器的每个位置,通过读取每道刻线的通、暗,获得一组从2的零次方到2的-1次方的唯 一的2进制编码(格雷码),称为位绝对编码器。绝对值编码器是由码盘的机械位置决定的,不受停电、干扰的影 响。 编码器的安装 安装时注意允许的轴负载 保证编码器轴与用户输出轴的不同轴度< 0.20mm,与轴线的偏角<1.5 严禁敲击和摔打碰撞,以免损坏轴系和码盘 定期检查固定编码器的螺钉是否松动 接地线应尽量粗,一般应大于1.5平方 编码器的输出线彼此不要搭接,以免损坏输出 电路 9c7 编码器的信号线不要接到直流电源上或交流电 流上,以免损坏输出电路 光电耦合器扫描旋转盘上的代码图案 与编码器相连的电机等设备,应接地良好,防 每一个位置有其独一无二的代码 静电
6.羽毛球机器人定位与视觉系统设计 7 航迹推算法定位---编码器 绝对值编码器用来检测旋转运动的旋转角度。码盘上有许多道光通道刻线,每道刻线依次以2线、4线、8线、16线 。。。。。。编排,在编码器的每个位置,通过读取每道刻线的通、暗,获得一组从2的零次方到2的n-1次方的唯 一的2进制编码(格雷码),称为n位绝对编码器。绝对值编码器是由码盘的机械位置决定的,不受停电、干扰的影 响。 光电耦合器扫描旋转盘上的代码图案 每一个位置有其独一无二的代码 编码器的安装 • 安装时注意允许的轴负载 • 保证编码器轴与用户输出轴的不同轴度< 0.20mm,与轴线的偏角<1.5° • 严禁敲击和摔打碰撞,以免损坏轴系和码盘 • 定期检查固定编码器的螺钉是否松动 • 接地线应尽量粗,一般应大于1.5平方 • 编码器的输出线彼此不要搭接,以免损坏输出 电路 • 编码器的信号线不要接到直流电源上或交流电 流上,以免损坏输出电路 • 与编码器相连的电机等设备,应接地良好,防 静电
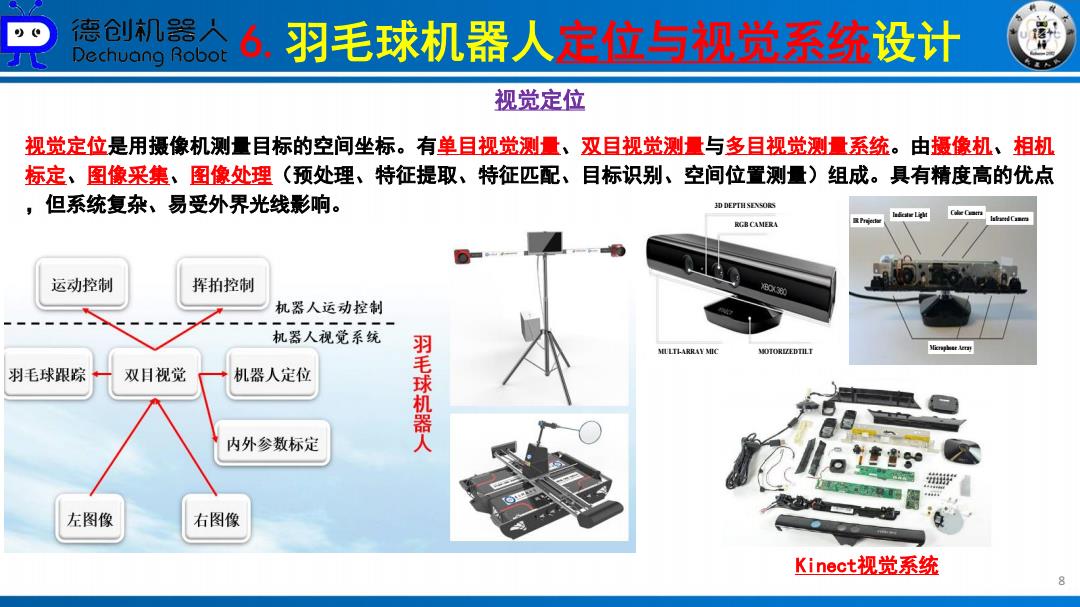
德创机器人 Dechuang Robot 6.羽毛球机器人定位与视觉系统设计 视觉定位 视觉定位是用摄像机测量目标的空间坐标。有单且视觉测量、双目视觉测量与多目视觉测量系统。由摄像机、相机 标定、图像采集、图像处理(预处理、特征提取、特征匹配、目标识别、空间位置测量)组成。具有精度高的优点 ,但系统复杂、易受外界光线影响。 3D DEPTH SENSORS lefcse Ligkt RGB CAMERA 运动控制 挥拍控制 电00 机器人运动控制 机器人视觉系统 羽毛球跟踪 双目视觉 机器人定位 羽毛球机器人 内外参数标定 左图像 右图像 Kinect视觉系统
6.羽毛球机器人定位与视觉系统设计 8 视觉定位 视觉定位是用摄像机测量目标的空间坐标。有单目视觉测量、双目视觉测量与多目视觉测量系统。由摄像机、相机 标定、图像采集、图像处理(预处理、特征提取、特征匹配、目标识别、空间位置测量)组成。具有精度高的优点 ,但系统复杂、易受外界光线影响。 3D DEPTH SENSORS RGB CAMERA MULTI-ARRAY MIC MOTORIZEDTILT IR Projector Infrared Camera Microphone Array Color Camera Indicator Light Kinect视觉系统
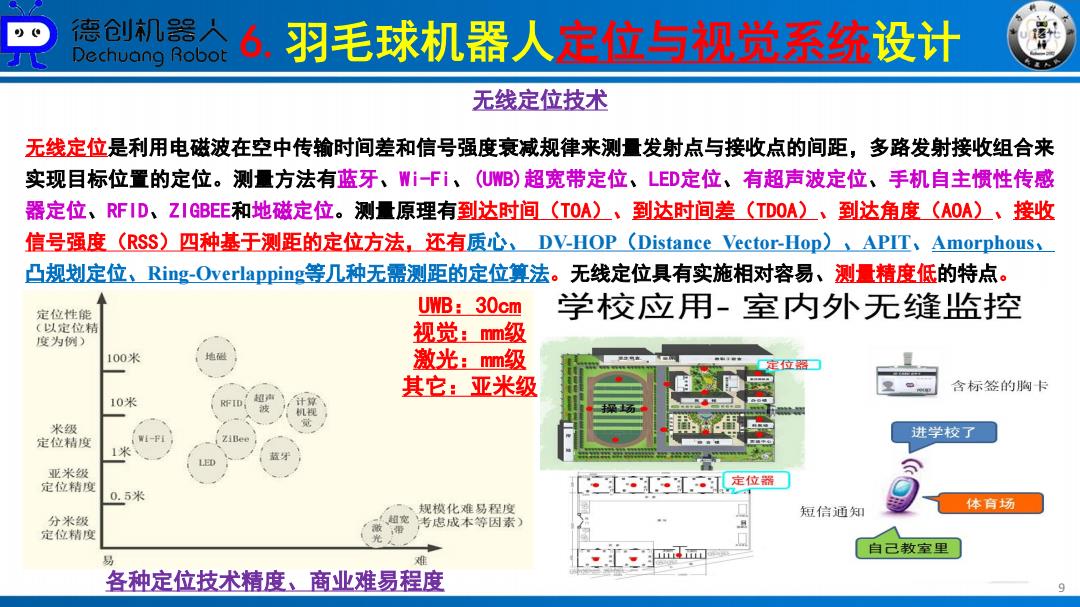
德创机器人 Dechuang Robot 6.羽毛球机器人定位与视觉系统设计 无线定位技术 无线定位是利用电磁波在空中传输时间差和信号强度衰减规律来测量发射点与接收点的间距,多路发射接收组合来 实现目标位置的定位。测量方法有蓝牙、Wi-F引、(UWB)超宽带定位、LED定位、有超声波定位、手机自主惯性传感 器定位、RFID、ZIGBEE和地磁定位。测量原理有到达时间(TOA)、到达时间差(TDOA)、到达角度(AOA)、接收 信号强度(RSS)四种基于测距的定位方法,还有质心,DV-HOP(Distance Vector-Hop),APIT、Amorphous、 凸规划定位、Ring-Overlapping等几种无需测距的定位算法。无线定位具有实施相对容易、测量精度低的特点。 定位性能 UWB:30cm 学校应用-室内外无逢监空 (以定位相 度为例) 视觉:mm级 100米 地磁 激光:m级 庄位器口 其它:亚米级 含标签的胸卡 10米 RFID: 超 计算 机视 米级 进学校了 定位精度 WI-FI 1米 LED 蓝好 亚米级 定位精度 ·。。定位器 0.5米 、规模化难易程度 短信通知 体育场 分米级 宽考虑成本等因素) 定位精度 液带 光 自己教室里 易 难 各种定位技术精度、商业难易程度 9
6.羽毛球机器人定位与视觉系统设计 9 无线定位技术 无线定位是利用电磁波在空中传输时间差和信号强度衰减规律来测量发射点与接收点的间距,多路发射接收组合来 实现目标位置的定位。测量方法有蓝牙、Wi-Fi、(UWB)超宽带定位、LED定位、有超声波定位、手机自主惯性传感 器定位、RFID、ZIGBEE和地磁定位。测量原理有到达时间(TOA)、到达时间差(TDOA)、到达角度(AOA)、接收 信号强度(RSS)四种基于测距的定位方法,还有质心、 DV-HOP(Distance Vector-Hop)、APIT、Amorphous、 凸规划定位、Ring-Overlapping等几种无需测距的定位算法。无线定位具有实施相对容易、测量精度低的特点。 各种定位技术精度、商业难易程度 UWB:30cm 视觉:mm级 激光:mm级 其它:亚米级

德仓创机器人 Dechuang Robot 6.羽毛球机器人定位与视觉系统设计 羽毛球机器人实时定位系统 羽毛球运动要求机器人运动具有速度快、位置准确、运动时间长等特点。综合考虑现有各种定位技术,选定航迹推 算法和视觉定位相结合的定位方案。机器人接球过程中,由航迹推算法实时给出机器人位置坐标,在机器人回到起 始位后由视觉定位系统给出机器人当前准确的位置坐标,并予以校正,以消除航迹推算法的累积定位误差。实质是 一种局部定位(航迹推算法)与全局定位(视觉定位)的结合。 全场定位 模块 CAN总线 主控 视觉系统 10
6.羽毛球机器人定位与视觉系统设计 10 羽毛球机器人实时定位系统 羽毛球运动要求机器人运动具有速度快、位置准确、运动时间长等特点。综合考虑现有各种定位技术,选定航迹推 算法和视觉定位相结合的定位方案。机器人接球过程中,由航迹推算法实时给出机器人位置坐标,在机器人回到起 始位后由视觉定位系统给出机器人当前准确的位置坐标,并予以校正,以消除航迹推算法的累积定位误差。实质是 一种局部定位(航迹推算法)与全局定位(视觉定位)的结合。 主控 全场定位 模块 CAN总线 无线数传 视觉系统
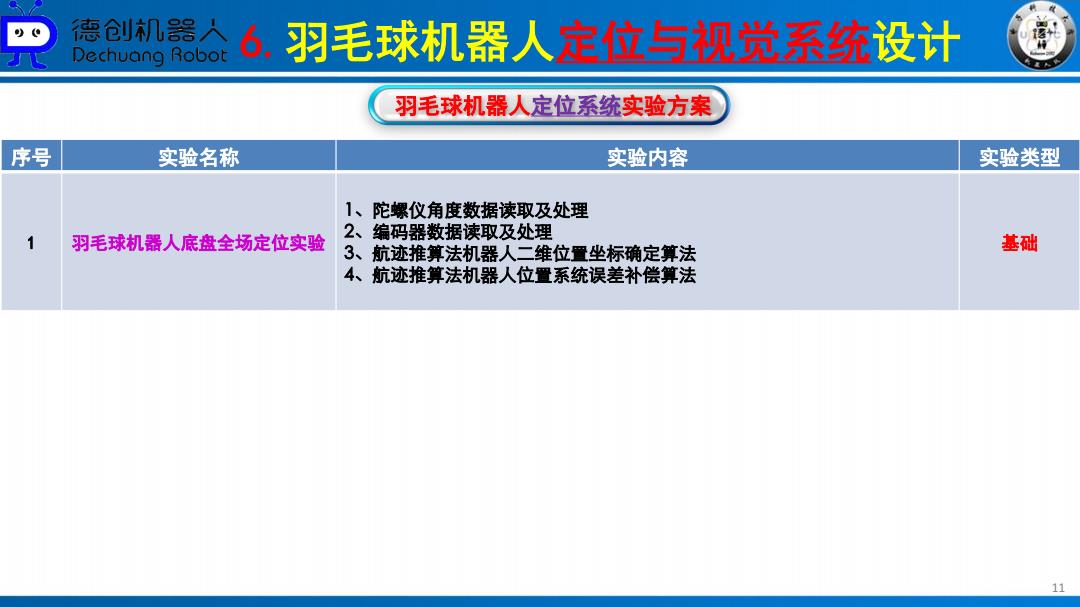
90 德仓创机器人 Dechuang Robot 6.羽毛球机器人定位与视觉系统设计 羽毛球机器人定位系统实验方案 序号 实验名称 实验内容 实验类型 1、陀螺仪角度数据读取及处理 羽毛球机器人底盘全场定位实验 2、编码器数据读取及处理 3、航迹推算法机器人二维位置坐标确定算法 基础 4、航迹推算法机器人位置系统误差补偿算法 11
6.羽毛球机器人定位与视觉系统设计 11 羽毛球机器人定位系统实验方案 序号 实验名称 实验内容 实验类型 1 羽毛球机器人底盘全场定位实验 1、陀螺仪角度数据读取及处理 2、编码器数据读取及处理 3、航迹推算法机器人二维位置坐标确定算法 4、航迹推算法机器人位置系统误差补偿算法 基础