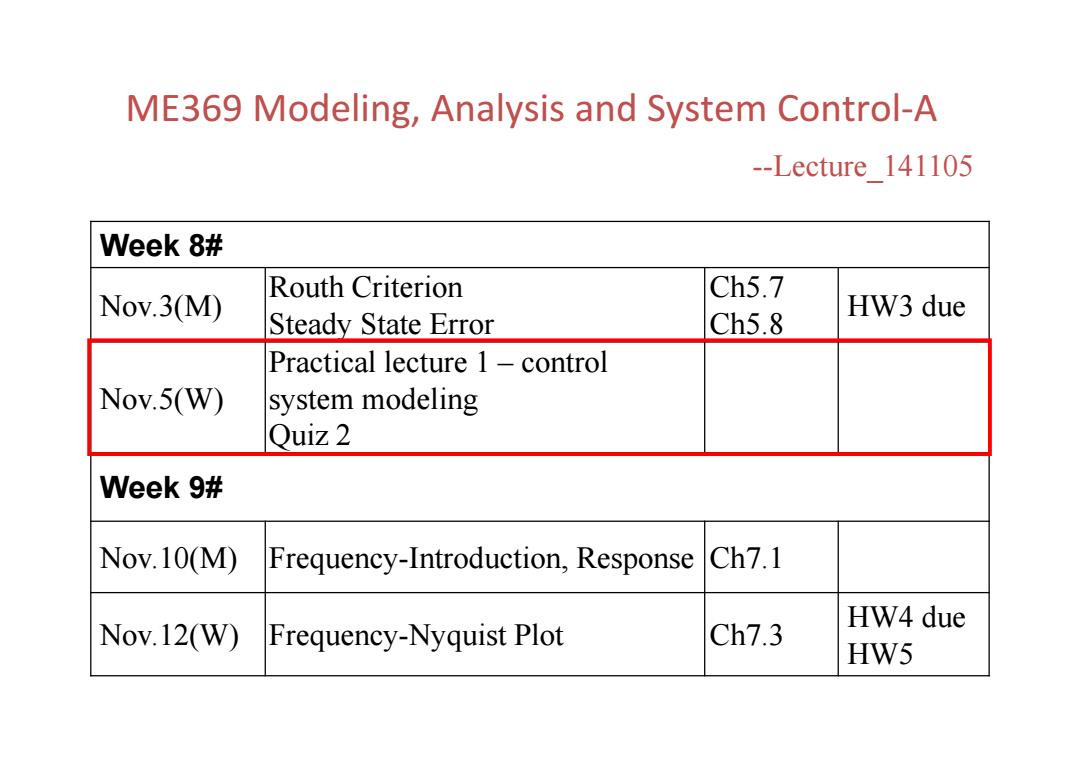
ME369 Modeling,Analysis and System Control-A --Lecture 141105 Week 8# Nov.3(M) Routh Criterion Ch5.7 HW3 due Steady State Error Ch5.8 Practical lecture 1-control Nov.5(W) system modeling Quiz 2 Week 9# Nov.10(M) Frequency-Introduction,Response Ch7.1 Ch7.3 HW4 due Nov.12(W)Frequency-Nyquist Plot HW5
ME369 Modeling, Analysis and System Control‐A --Lecture_141105 Week 8# Nov.3(M) Routh Criterion Steady State Error Ch5.7 Ch5.8 HW3 due Nov.5(W) Practical lecture 1 – control system modeling Quiz 2 Week 9# Nov.10(M) Frequency-Introduction, Response Ch7.1 Nov.12(W) Frequency-Nyquist Plot Ch7.3 HW4 due HW5
Practical lecture 1 -Control system modeling Disk Drive Read System E
Disk Drive Read System Practical lecture 1 – Control system modeling
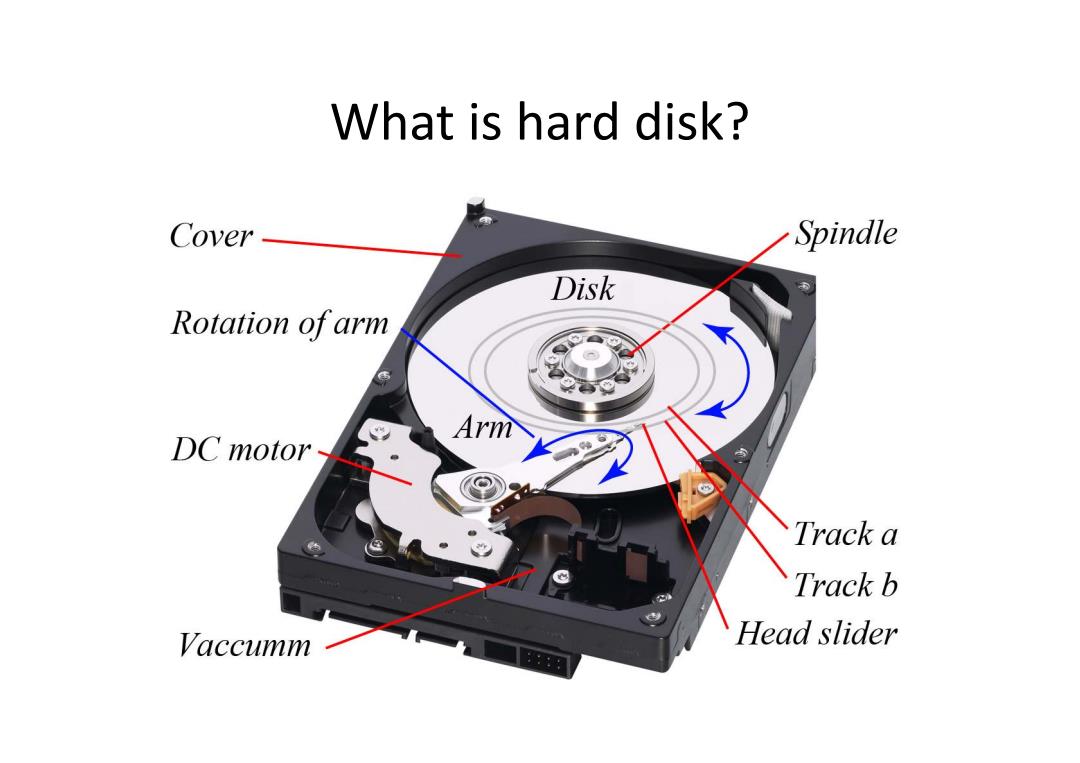
What is hard disk? Cover Spindle Disk Rotation ofarm Arm DC motor- Track a Track b Vaccumm Head slider
What is hard disk?
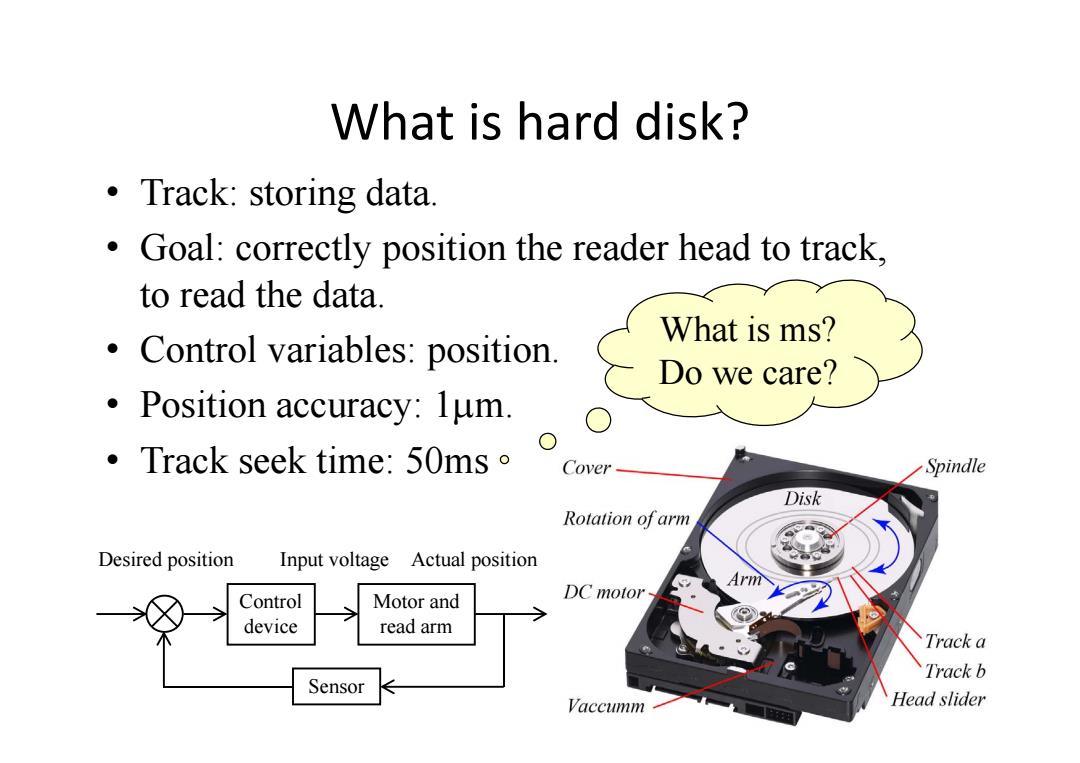
What is hard disk? ·Track:storing data. Goal:correctly position the reader head to track, to read the data. What is ms? Control variables:position. Do we care? Position accuracy:lum. Track seek time:50ms Cover Spindle Disk Rotation of arm Desired position Input voltage Actual position Arm Control Motor and DC motor device read arm Track a Track b Sensor Vaccumm Head slider
What is hard disk? • Track: storing data. • Goal: correctly position the reader head to track, to read the data. • Control variables: position. • Position accuracy: 1m. • Track seek time: 50ms Control device Motor and read arm Sensor Desired position Actual position Input voltage What is ms? Do we care?
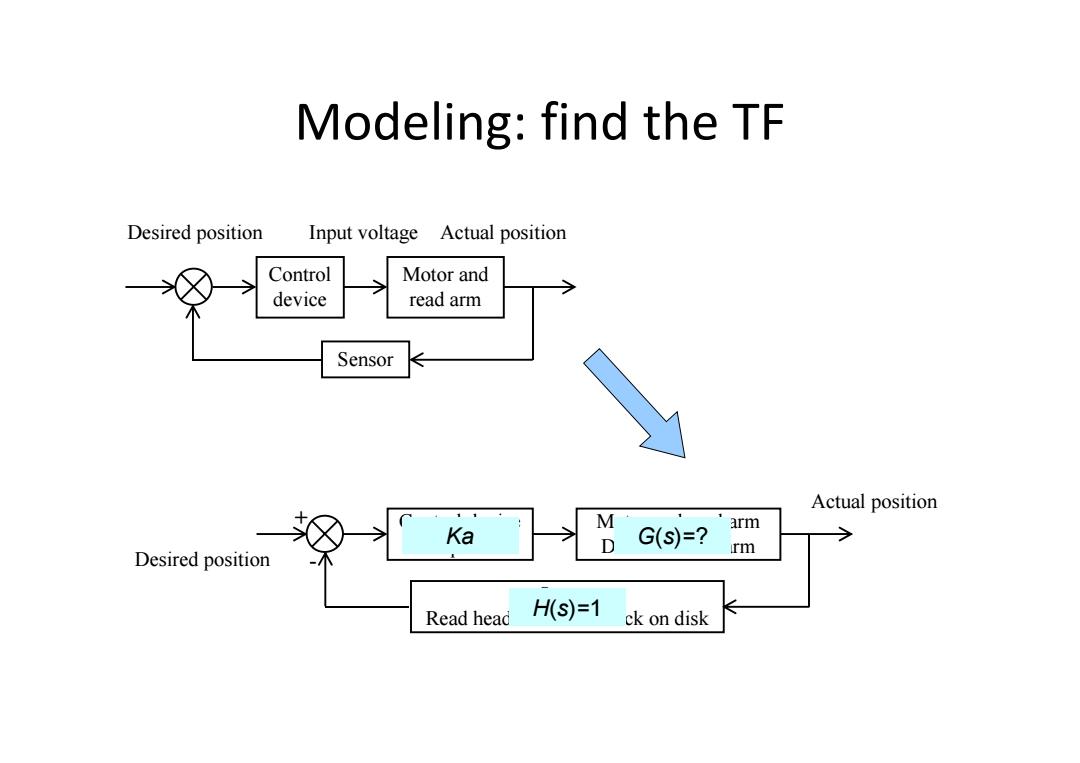
Modeling:find the TF Desired position Input voltage Actual position Control Motor and device read arm Sensor Actual position arm Ka D G(s)=? rm Desired position Read head H(S)=1 ck on disk
Modeling: find the TF Control device Motor and read arm Sensor Desired position Actual position Input voltage Control device Amplifier Motor and read arm DC motor and arm Sensor Read head and index track on disk Desired position Actual position + - Ka H(s)=1 G(s)=?