ME369 Modeling,Analysis and System Control-A --Lecture 141008 Week 4# Oct.6(M) Rest Oct.8(W) Dynamic systems-electrical Ch3.3 /electro-mechanical systems Week 5# Ch2.1~ Oct.13M)) Transfer function,block diagram HW2 due 2.3 Signal Flow Graphs Oct.15(W) Ch3.9, HW3 Linearization 3.10(4)
ME369 Modeling, Analysis and System Control-A --Lecture_141008 Week 4# Oct.6(M) Rest Oct.8(W) Dynamic systems – electrical /electro-mechanical systems Ch3.3 Week 5# Oct.13(M) Transfer function, block diagram Ch2.1 ~ 2.3 HW2 due Oct.15(W) Signal Flow Graphs Linearization Ch3.9, 3.10 (4th ) HW3
DC Servo-Motor Ra G I,=constant R3=armature resistance,2电枢电阻 i=field current,A La=armature inductance,H,电枢电感 激磁电流 ia=armature current,.A,电枢电流
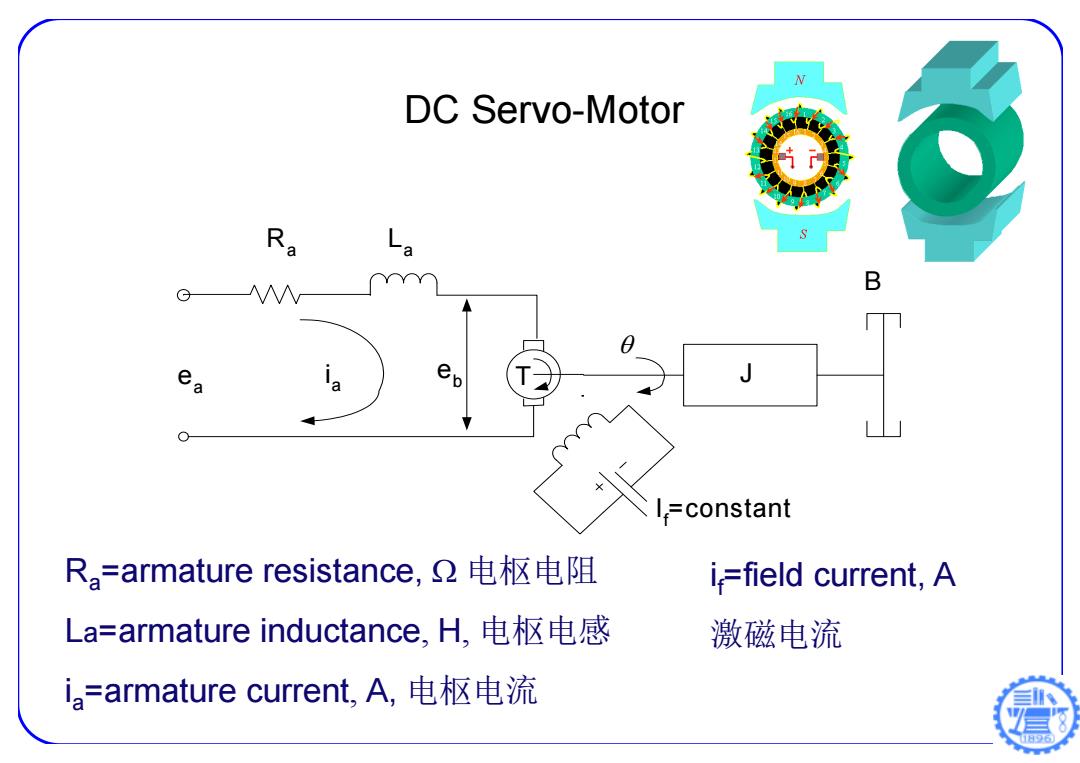
ea B La If=constant Ra eb T J ia Ra=armature resistance, 电枢电阻 La=armature inductance, H, 电枢电感 ia=armature current, A, 电枢电流 if=field current, A 激磁电流 DC Servo-Motor
ea=applied armature voltage,V电枢控制电压 e,=back emf(electromotive force),V感应反电动势 d=angular displacement of the motor shaft,.rad电机轴上的角位移 T=torque developed by the motor.N-m电机力矩。 J=moment of inertia of the motor and load referred to the motor shaft.Kg-m2电机转子和负载的惯量。 b=viscous-friction coefficient of the motor and load referred to the motor shaft.N-m/rad/s.电机转子和负载的粘性摩擦系数。 Ra L B G =constant
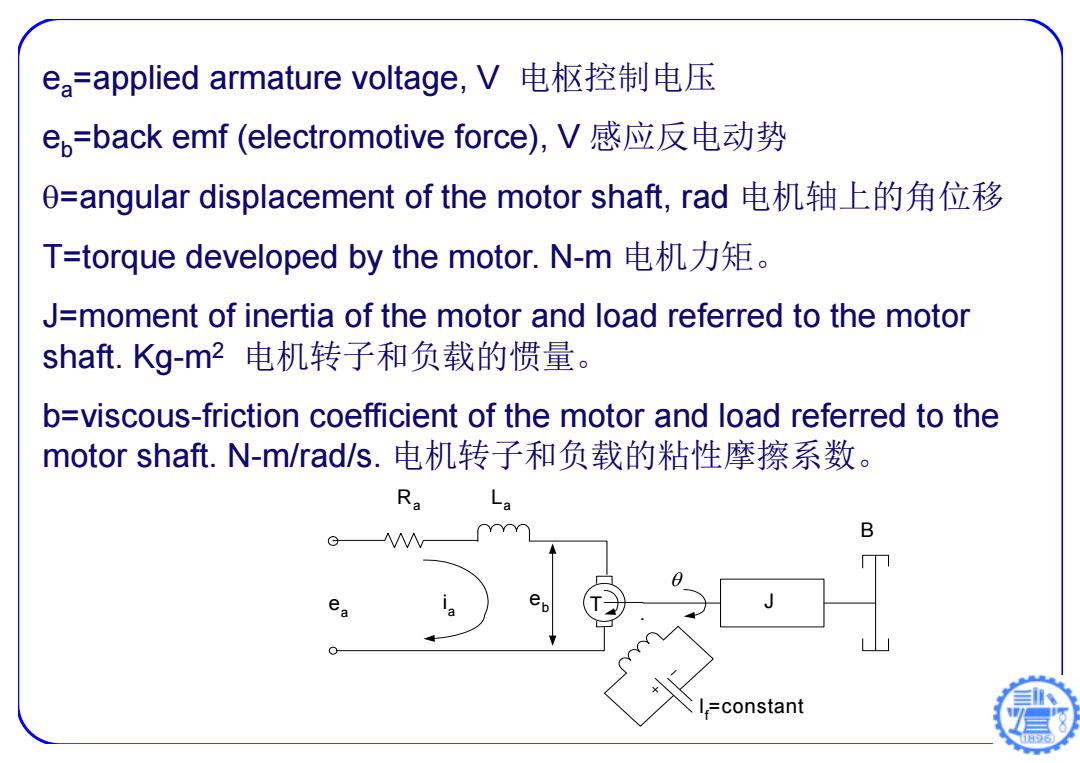
ea=applied armature voltage, V 电枢控制电压 eb=back emf (electromotive force), V 感应反电动势 =angular displacement of the motor shaft, rad 电机轴上的角位移 T=torque developed by the motor. N-m 电机力矩。 J=moment of inertia of the motor and load referred to the motor shaft. Kg-m2 电机转子和负载的惯量。 b=viscous-friction coefficient of the motor and load referred to the motor shaft. N-m/rad/s. 电机转子和负载的粘性摩擦系数。 ea B La If=constant Ra eb T J ia
Four Governing Equations for DC Servo Motor T=Kria Kr:torque constant do e6=K6 di Kp:back emf constant. La ia+Ri。+ew=ea 6 d20 =T=Kria 日6
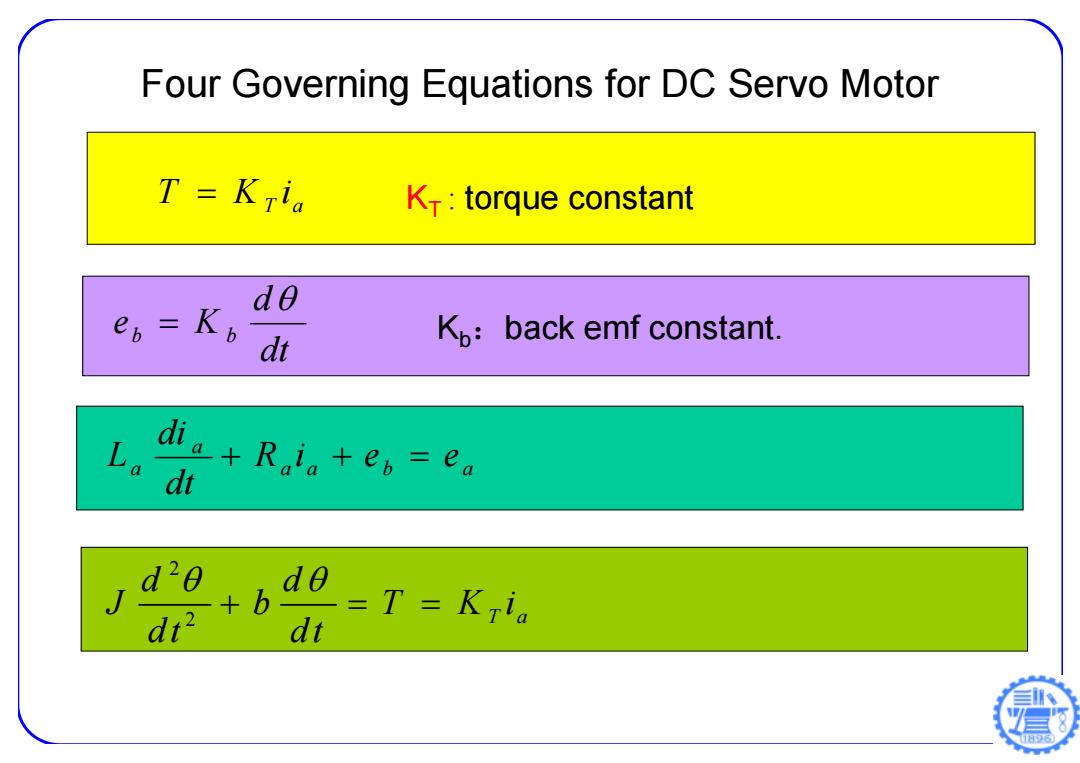
KT T Ki T a : torque constant dt d eb K b Kb:back emf constant. Four Governing Equations for DC Servo Motor a a b a a a R i e e dt di L 2 2 T a d d J b T Ki dt dt
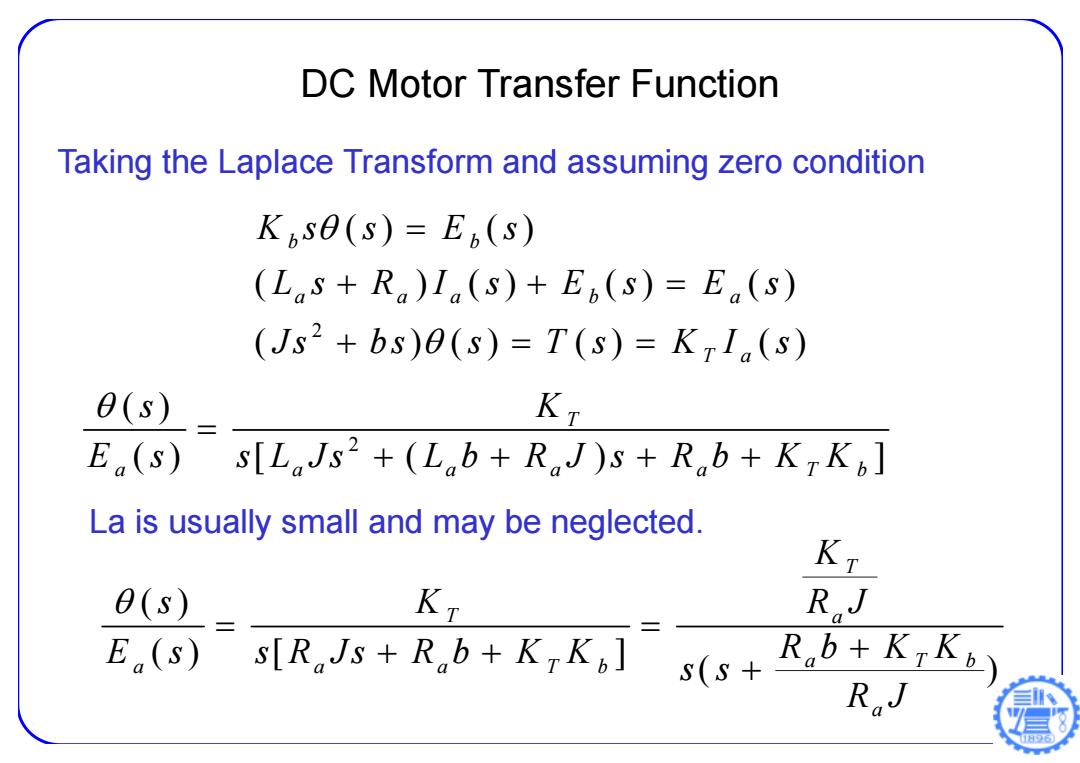
DC Motor Transfer Function Taking the Laplace Transform and assuming zero condition Kise(s)=E(s) (Las+R)Ia(s)+En(s)=E(s) (Js2+bs)e(s)=T(s)=K71(s) 0(s) KT E(s) s[LJs2+(Lob+RJ)s+Rob+KTK] La is usually small and may be neglected. θ(s) KT RJ E(s) sTRJs+Rb+k,k s(s4RbtKk RaJ
Taking the Laplace Transform and assuming zero condition 2 () () ( ) () () () ( ) () () () b b a aa b a T a Ks s E s L s RIs Es Es Js bs s T s K I s DC Motor Transfer Function 2 ( ) () [ ( ) ] T a a a a a Tb s K E s s L Js L b R J s R b K K La is usually small and may be neglected. ( ) () [ ] ( ) T T a a Tb a a a Tb a K s K R J E s s R Js R b K K Rb K K s s R J