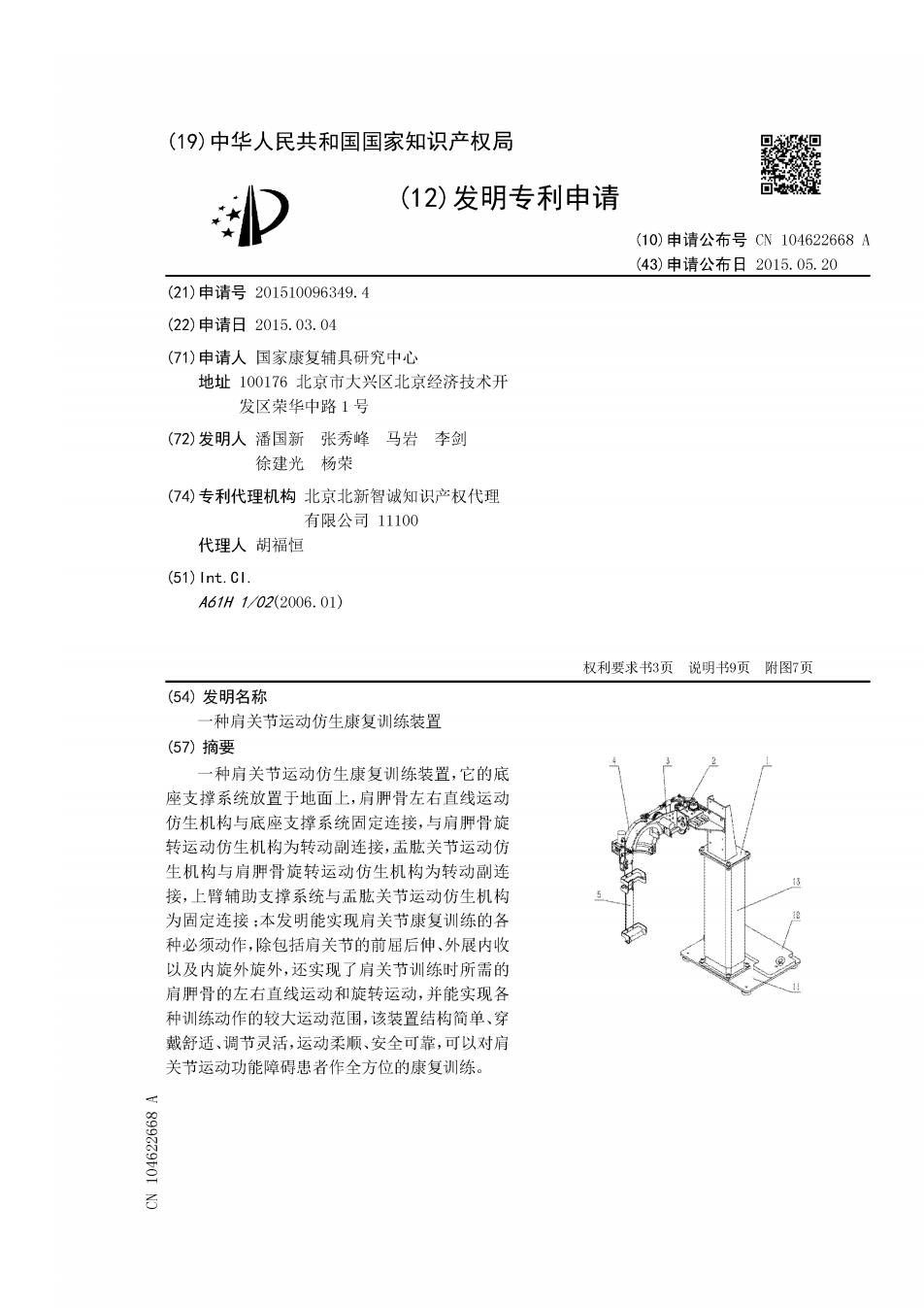
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN104622668A (43)申请公布日2015.05.20 (21)申请号201510096349.4 (22)申请日2015.03.04 (71)申请人国家康复辅具研究中心 地址100176北京市大兴区北京经济技术开 发区荣华中路1号 (72)发明人潘国新张秀峰马岩李剑 徐建光杨荣 (74)专利代理机构北京北新智诚知识产权代理 有限公司11100 代理人胡福恒 (51)Int.c1 A61H102(2006.01) 权利要求书3页说明书9页附图7页 (54)发明名称 一种肩关节运动仿生康复训练装置 (57)摘要 一种肩关节运动仿生康复训练装置,它的底 座支撑系统放置于地面上,肩胛骨左右直线运动 仿生机构与底座支撑系统固定连接,与肩胛骨旋 转运动仿生机构为转动副连接,盂肱关节运动仿 生机构与肩胛骨旋转运动仿生机构为转动副连 接,上臂辅助支撑系统与盂肱关节运动仿生机构 为固定连接:本发明能实现肩关节康复训练的各 种必须动作,除包括肩关节的前屈后伸、外展内收 以及内旋外旋外,还实现了肩关节训练时所需的 肩胛骨的左右直线运动和旋转运动,并能实现各 种训练动作的较大运动范围,该装置结构简单、穿 戴舒适、调节灵活,运动柔顺、安全可靠,可以对肩 关节运动功能障碍患者作全方位的康复训练。 89923950 石
CN104622668A 权利要求书 1/3页 1.一种肩关节运动仿生康复训练装置,其特征在于:它包括底座支撑系统(1)、肩胛骨 左右直线运动仿生机构(2)、肩胛骨旋转运动仿生机构(3)、盂肱关节运动仿生机构(4)、上 臂辅助支撑系统(5); 底座支撑系统(1)放置于地面上,肩胛骨左右直线运动仿生机构(2)与底座支撑系统 (1)固定连接,肩胛骨左右直线运动仿生机构(2)与肩胛骨旋转运动仿生机构(3)为转动副 连接,盂肱关节运动仿生机构(4)与肩胛骨旋转运动仿生机构(3)为转动副连接,上臂辅助 支撑系统(⑤)与盂肱关节运动仿生机构(4)为固定连接: 所述底座支撑系统(1)主要包括:底板(11)、配重(12)、电动升降柱(13)以及支撑立 座(15):底板(11)下部安装有四个地脚(14),用于支撑在水平地面上,电动升降柱(13)包 括定柱(131)和动柱(132),通过动柱(132)的电动升降控制来调节康复训练机构的高低, 以适应坐姿和站姿时的人体肩关节高度:支撑立座(15)上设有调节孔,用于固定联接肩胛 骨左右直线运动仿生机构(2),安装时可以变换固定孔位,以适合不同人体肩关节的高度: 所述肩胛骨左右直线运动仿生机构(2)包括直线滑动机构和齿轮齿条传动触发机构: 该直线滑动机构包括导轨支撑座(201)、直线导轨(202)、滑块(203)、丁字板座(204)、 齿条(205)、直线移位齿轮(206),导轨支撑座(201)与支撑立座(15)通过螺栓连接固定, 直线导轨(202)与导轨支撑座(201)通过螺钉连接固定,丁字板座(204)与滑块(203)通过 螺钉连接固定,丁字板座(204)上设有直线移位齿轮(206),直线移位齿轮(206)通过齿轮 固定轴(224)、第一滚动轴承(225)、螺钉(226)、轴挡圈(227)安装在丁字板座(204)上,齿 条(205)通过螺钉连接固定在导轨支撑座(201)上,直线移位齿轮(206)始终与齿条(205) 处于啮合状态; 该齿轮齿条传动触发机构包括曲柄(207)、上连板(208)、滑座(209)、拉轴(214)、伸缩 杆(215)、托架(216)、导板(219)、丁字摇板(222),曲柄(207)与直线移位齿轮(206)上端 连接固定,上连板(208)的两端分别与曲柄(207)和滑座(209)的上部铰接,滑座(209)的 下部铰接在支撑轴(212)上,能沿其轴向进行滑动,支撑轴(212)安装在轴架(210)上,轴 架的两端装有小压板(213),限制轴的轴向移动和周向转动,轴架(210)与丁字板座(204) 连接固定,支撑轴(212)上套装有两个第一压簧(211),分别位于滑座(209)的两侧,使滑座 (209)在静止状态下自动回位到中间位置,托架(216)与主固定座(301)连接固定,伸缩杆 (215)与托架(216)为圆柱副铰接,相互之间能轴向滑动,拉轴(214)上端与伸缩杆(215) 的一端垂直固定,拉轴(214)下部插入滑座(209)的长槽(228)内配合,伸缩杆(215)的另 一端与导板(219)固定连接,丁字摇板(222)的一端与半圆支座(401)上的定位螺柱(223) 铰接,另一端通过螺柱(220)、顶套(221)与导板(219)接触连接,在肩屈伸90度时,前拉 板(408)从垂直位置向上转到水平位置,在此位置做肩关节内收外展运动时,前拉板(408) 上的两个压转套(409)通过触碰丁字摇板(222)的侧边来带动导板(219)和伸缩杆(215) 的前后移动,在托架(216)两侧的伸缩杆(215)上,对称安装有第二压簧(217)和定位套 (218),使伸缩杆在不伸缩状态下保持中间位置,伸缩杆(215)的轴向移动使拉轴(214)拉 动滑座(209)沿支撑轴(212)来回左直线移动,从而带动直线移位齿轮(206)的转动,通过 与齿条(205)的啮合运动,实现肩胛骨仿生机构的左右直线运动。 2.根据权利要求1中所述的肩关节运动仿生康复训练装置,其特征在于: 所述肩胛骨旋转运动仿生机构(3)包括齿轮单摆机构和齿轮转动触发机构: 2
CN104622668A 权 利要求书 2/3页 该齿轮单摆机构包括主固定座(301)、肩胛骨旋转固定齿轮(302)、肩胛骨旋转动齿轮 (303)、摆轴(304)、限位轴(307)、第二滚动轴承(308),肩胛骨旋转固定齿轮(302)通过转 轴(309)与丁字板座(204)为固定连接,主固定座(301)与转轴(309)之间为转动副铰接 结构:肩胛骨旋转动齿轮(303)与摆轴(304)为固定连接,摆轴(304)以转动副铰接的形 式安装在主固定座(301)上,肩胛骨旋转动齿轮(303)与肩胛骨旋转固定齿轮(302)为标 准齿轮传动啮合状态,摆轴(304)带动肩胛骨旋转动齿轮(303)旋转时,肩胛骨旋转固定齿 轮(302)静止不动,肩胛骨旋转动齿轮(303)在旋转的同时,带动摆轴(304)及主固定座 (301)向上旋转摆动,限位轴(307)与丁字板座(204)为固定连接,第二滚动轴承(308)安 装于限位轴(307)的端部,并于主固定座(301)上的弧形槽孔(310)接触配合,其作用为限 制主固定座(301)的运动范围,以使该机构与人体肩胛骨的旋转运动范围相匹配: 该齿轮转动触发机构包括主固定座(301)、摆轴(304)、联板(305)、摆臂(306)以及触 发部件压转套(409)、后拉板(410),主固定座(301)、摆轴(304)、联板(305)、摆臂(306)组 成平面四连杆机构,通过摆臂(306)的摆动,可驱动摆轴(304)及肩胛骨旋转动齿轮(303) 做旋转运动,当肩关节做外展运动训练时,后拉板(410)上端的压转套(409)向内摆动,通 过触压摆臂(306)的外侧面,使摆臂(306)摆动,从而驱动肩胛骨旋转动齿轮(303)旋转, 并绕肩胛骨旋转固定齿轮(302)的轴线作旋转摆动,从而达到肩胛骨旋转运动康复训练的 目的。 3.根据权利要求2中所述的肩关节运动仿生康复训练装置,其特征在于: 所述盂肱关节运动仿生机构(④)包括肩屈伸运动机构、肩收展运动机构和肩内外旋运 动机构; 该肩屈伸运动机构为1个自由度的转动副机构,主要由半圆支座(401)、下轴承瓦 (402)、屈伸转座(403)、肩屈伸齿轮(404)、肩屈伸驱动电机(405)、肩屈伸半齿轮(406)组 成:半圆支座(401)与主固定座(301)为固定连接,半圆支座(401)与下轴承瓦(402)通过 螺栓固定连接,它们分别相当于轴承的外圈和内圈,屈伸转座(403)与半圆支座(401)和下 轴承瓦(402)均为滚珠滑动连接的方式,半圆支座(401)的内圆周上设有双排滚珠,与屈伸 转座(403)上部圆弧表面上的凹槽相配合,凹槽也起到了轴向定位的作用,防止屈伸转座 (403)轴向脱出,下轴承瓦(402)的外圆周表面上也设有双排滚珠,与屈伸转座(403)下部 圆弧表面直接接触配合,此结构保证了屈伸转座(403)相对于半圆支座(401)的顺畅转动, 肩屈伸齿轮(404)与肩屈伸半齿轮(406)为齿轮传动机构,肩屈伸半齿轮(406)固定连接 在屈伸转座(403)上,肩屈伸半齿轮(406)和屈伸转座(403)的圆周角度均为230度,不但 能达到肩关节前屈运动的最大180度角度,而且能够最大作50度的后伸运动,与人体的肩 前屈后伸活动度范围相符,肩关节屈伸运动被动训练时,由肩屈伸驱动电机(405)来驱动 肩屈伸齿轮(404)转动,并带动屈伸转座(403)旋转,实现了肩屈伸运动; 该肩收展运动机构为1个自由度的转动副机构,连接座柱(407)与后拉板(410)及前 拉板(408)为较链连接,此机构运动时,由肩收展驱动电机(411)直接驱动后拉板(410)及 前拉板(408),一同绕连接座柱(407)的外凸轴的轴线转动,实现肩收展运动训练: 该肩内外旋运动机构包括肩内外旋驱动电机(412)、U型座(413)、外圈座(414)、肩旋 转半齿圈(416)、肩旋转小齿轮(417)、齿圈固定座(418),两个外圈座(414)由螺钉分别安 装在U型座(413)的上下支撑面上,并保证两外圈座(414)的圆弧中心上下同心,两外圈座 3

CN104622668A 权利要求书 3/3页 的侧面上下通过加强块(415)由螺钉固定连接,起到了支撑加强作用,并且前拉板(408)及 后拉板(410)也连接在加强块(415)上,肩旋转半齿圈(416)安装在齿圈固定座(418)的 凹槽上,并通过螺钉紧固连接,通过滚珠保持架(419)将滚动滚珠固定在齿圈固定座(418) 的上下平面上,最终通过滚珠与外圈座(414)的凹槽接触配合,肩旋转小齿轮(417)通过齿 轮轴安装固定在U型座(413)上,肩旋转小齿轮(417)与齿轮轴为固定连接,并与肩旋转半 齿圈(416)啮合,肩内外旋被动运动训练时,肩内外旋驱动电机(412)直接驱动齿轮轴及肩 旋转小齿轮(417)转动,并带动齿圈固定座(418)转动。 4.根据权利要求3中所述的肩关节运动仿生康复训练装置,其特征在于: 所述上臂辅助支撑系统(5),包括连接座(51)、调节上臂(52)、肘关节上支架(53)、肘 关节下支架(54)、调节前臂(55)、前臂板(56)、手支架(57)、手固定器(58)、肘关节转轴 (59):连接座(51)通过螺钉安装在齿圈固定座(418)的内部弧形面上,调节上臂(52)的 上部设有长槽孔,通过螺栓与连接座(⑤1)连接固定,连接长度可根据人体上臂的长度来调 节,调节上臂(52)的下端与肘关节上支架(53)通过螺栓固定连接,肘关节上支架(53)和 肘关节下支架(54)由肘关节转轴(59)连接为铰链结构,其相对转动角度能达到人体肘关 节活动度范围:肘关节下支架(54)通过螺栓与调节前臂(55)的上端连接固定,调节前臂 (55)的下部长槽孔端与前臂板(56)的上端由螺栓固定连接,连接长度可根据人体前臂的 长度来调节,前臂板(56)的下端与手支架(57)通过螺栓固定连接,手固定器(58)的两端 通过螺钉与手支架(57)连接。 4

CN104622668A 说明书 1/9页 一种肩关节运动仿生康复训练装置 技术领域 [0001]本发明涉及辅助医疗康复训练设备技术领域,属于一种人体运动功能康复训练装 置,具体为一种辅助人体肩关节进行康复训练的装置,适用于中风、肩周炎以及由于工伤、 体育运动损伤、交通事故等原因造成的肩关节运动障碍患者的康复训练。 背景技术 [0002]脑血管疾病、肌骨损伤等很容易导致人体的肢体运动功能障碍,经过临床治疗后, 康复治疗一般要早期介入,由于人体上肢比下肢动作精细,其功能恢复的难度较大。85%的 脑卒中患者在发病一开始就表现有上肢功能的损害,到了病后3~6个月,仍然有55% 75%的患者存在有上肢的问题,影响了患者的日常生活能力。对于偏瘫患者、尤其是急性 期偏瘫患者来说,为了维持关节活动度,临床上通常都需要进行尽可能大范围的单关节运 动。上肢运动功能主要涉及三个关节:肩关节、肘关节和腕关节,肩关节的运动是人体上臂 完成各种动作的基础,肩关节本身稳定性较差,是人体中最易损伤的关节。根据有关运动创 伤流行病学调查结果,上肢部分的运动创伤占22.18%,其中肩部创伤为主,占8.47%。在 机械化程度提高的背景下,一些手工劳动工作还是必不可少的,会引起一些职业性的肌肉 骨骼损伤流行病,其中肩部损伤约占10%。另外,肩周炎疾病在我国的发病率也很高,约为 15.9%,人体肌骨机能有所下降以及其它慢性病导致的牵涉肩痛,都会引发肩周炎。同时临 床上通常强调由近端关节到远端关节的逐步康复,因此肩的康复是患者上臂运动功能康复 的前提:因此研制针对肩关节康复训练的设备是非常必要的。 [0003]对于肩关节或上肢多关节的运动康复,传统的康复训练方式主要由治疗师根据经 验手动辅助患者进行训练,训练效果受到治疗师水平的影响,治疗师的工作强度也非常大。 近年20多年来,国内外的一些研究机构开展了上肢康复训练技术的研究,研制出多种功能 各异的上肢康复机器人和康复训练设备但真正能在临床推广应用的并不多。存在的主要问 题主要表现在: [0004](1)目前大多数康复机器人或训练设备仅仅限于单关节的某些简单活动或平面复 合运动,而康复的最基本要求是使患者恢复简单的日常生活的能力。这些运动虽从一定意 义上达到了活动关节防止肌肉萎缩的功效,却与日常功能性动作相差甚远,不能刺激患者 保持正确运动的感觉,对恢复日常生活能力帮助也不大。 [0005](2)康复机器人一般以完成某种功能而设计,设计时受机器人的限制不能完成较 大范围的活动,不能满足关节活动度训练的要求,尤其对肩关节这种活动范围较大的关节, 因而也就不能充分提供中枢神经康复所需的运动刺激。 [0006](3)实际的肩关节并不只是一个球窝关节,而是一个肩部多关节复合体,一般的上 肢运动学模型中只考虑了肱骨、尺骨和桡骨三根骨骼的运动,而没有考虑肩胛骨、锁骨和胸 骨之间的关节运动,忽略了它们在肩关节运动过程中起到的作用。 [0007](4)无论是并联式还是串联式运动康复训练装置,其结构一般较为复杂,输入驱动 太多,不符合辅助医疗康复训练设备结构简易、重量轻、舒适性好等要求。 5