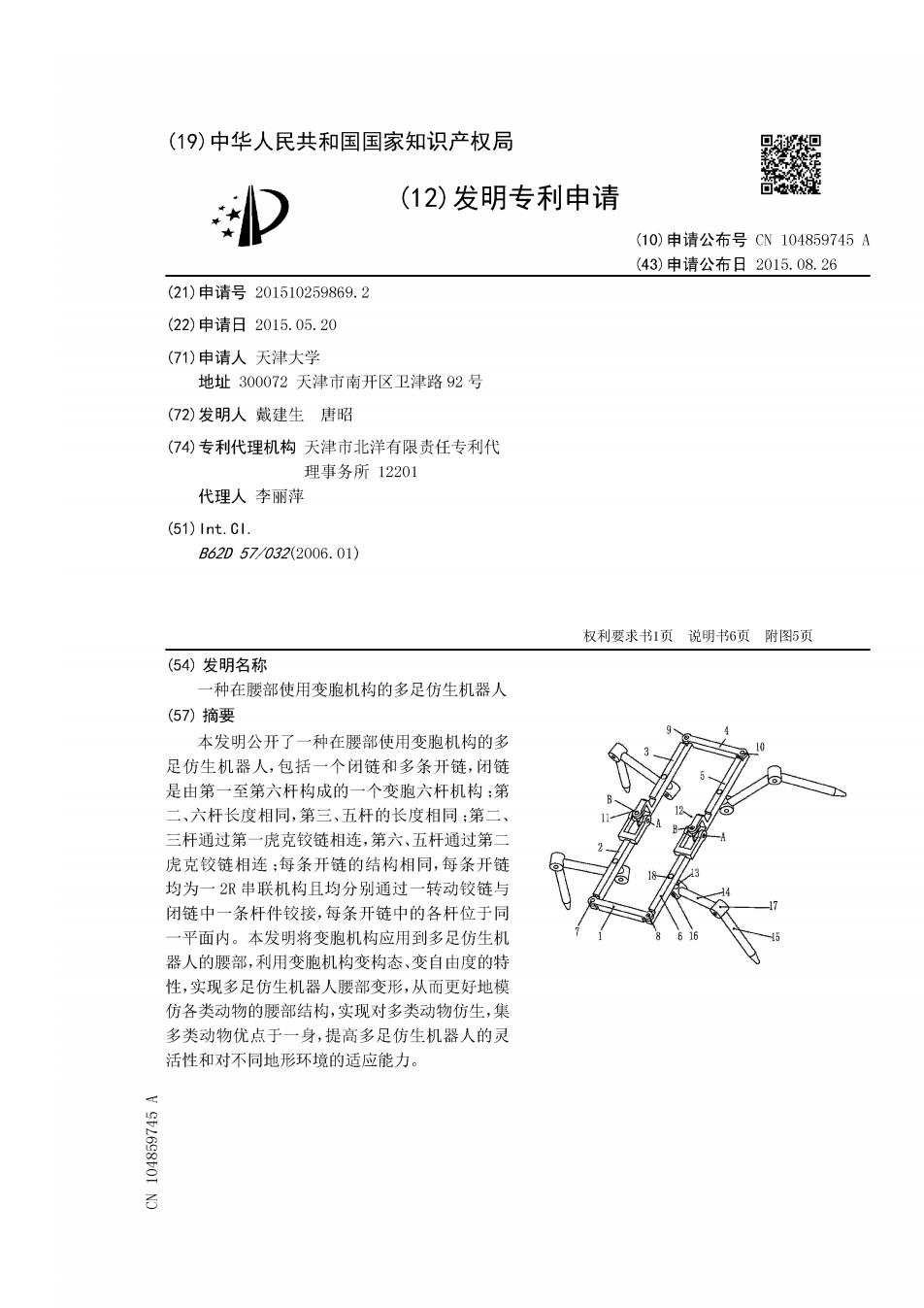
(19)中华人民共和国国家知识产权局 (12)发明专利申请 ▣5 (10)申请公布号CN104859745A (43)申请公布日2015.08.26 (21)申请号201510259869.2 (22)申请日2015.05.20 (71)申请人天津大学 地址300072天津市南开区卫津路92号 (72)发明人戴建生唐昭 (74)专利代理机构天津市北洋有限责任专利代 理事务所12201 代理人李丽萍 (51)1nt.Cl. B62D57032(2006.01) 权利要求书1页说明书6页附图5页 (54)发明名称 一种在腰部使用变胞机构的多足仿生机器人 (57)摘要 本发明公开了一种在腰部使用变胞机构的多 足仿生机器人,包括一个闭链和多条开链,闭链 是由第一至第六杆构成的一个变胞六杆机构:第 二、六杆长度相同,第三、五杆的长度相同:第二、 三杆通过第一虎克铰链相连,第六、五杆通过第二 虎克铰链相连:每条开链的结构相同,每条开链 均为一2R串联机构且均分别通过一转动铰链与 闭链中一条杆件铰接,每条开链中的各杆位于同 一平面内。本发明将变胞机构应用到多足仿生机 器人的腰部,利用变胞机构变构态、变自由度的特 性,实现多足仿生机器人腰部变形,从而更好地模 仿各类动物的腰部结构,实现对多类动物仿生,集 多类动物优点于一身,提高多足仿生机器人的灵 活性和对不同地形环境的适应能力。 G9760350

CN104859745A 权利要求书 1/1页 1.一种在腰部使用变胞机构的多足仿生机器人,包括一个闭链和多条开链,其特征在 于: 所述闭链是由第一杆(1)、第二杆(2)、第三杆(3)、第四杆(4)、第五杆(5)和第六杆 (6)构成的一个变胞六杆机构; 第一杆(1)的两端分别通过第一转动铰链(7)和第二转动铰链(8)与第二杆(2)的一 端和第六杆(6)的一端相连,第一转动铰链(7)和第二转动铰链(8)的轴线相互平行: 第四杆(4)的两端分别通过第三转动铰链(9)和第四转动铰链(10)与第三杆(3)的 一瑞和第五杆(5)的一端相连,第三转动铰链(9)和第四转动铰链(10)的轴线相互平形: 所述第二杆(2)和所述第六杆(6)长度相同,所述第三杆(3)与所述第五杆(5)的长 度相同: 第二杆(2)和第三杆(3)通过第一虎克铰链(11)相连,第一虎克较链(11)的两条轴 线中,其中一条轴线与第一转动铰链(7)的轴线垂直,另一条轴线与第三转动铰链(9)的轴 线平行; 第六杆(6)和第五杆(5)通过第二虎克铰链(12)相连,第二虎克铰链(12)的两条轴 线中,其中一条轴线与第二转动铰链(8)的轴线垂直,另一条轴线与第四转动铰链(10)的 轴线平行; 每条开链的结构相同均分别包括第七杆(13)、第八杆(14)和第九杆(15),所述第七杆 (13)、第八杆(14)和第九杆(15)位于同一平面内,所述第八杆(14)的两端分别通过第五 转动铰链(16)和第六转动铰链(17)与第七杆(13)和第九杆(15)相连,所述第五转动铰 链(16)和第六转动铰链(17)的轴线相互平行: 当开链数目为四条时,每条开链中的第七杆(13)均分别通过第七转动铰链(18)与第 二杆(2)、第三杆(3)、第五杆(⑤)和第六杆(6)转动铰接,四条开链与第二杆(2)、第三杆 (3)、第五杆(5)和第六杆(6)之间的四个第七转动铰链(18)的轴线与第一转动铰链(7) 的轴线平行、且落在第七杆(13)、第八杆(14)和第九杆(15)所在平面内: 当开链数目为六条时,每条开链中的第七杆(13)均分别通过第七转动铰链(18)与第 一杆(1)、第二杆(2)、第三杆(3)、第四杆(4)、第五杆(5)和第六杆(6)转动铰接,六条开链 与第一杆(1)、第二杆(2)、第三杆(3)、第四杆(4)、第五杆(5)和第六杆(6)之间的六个第 七转动铰链(18)的轴线与第一转动铰链(7)的轴线平行,且落在第七杆(13)、第八杆(14) 和第九杆(15)所在平面内。 2.根据权利要求1所述在腰部使用变胞机构的多足仿生机器人,其特征在于,每条开 链均为一2R串联机构。 3.根据权利要求1所述在腰部使用变胞机构的多足仿生机器人,其特征在于,第一虎 克铰链(11)中与第一转动铰链(7)轴线垂直的转动铰链为转动铰链A,另一个转动铰链为 转动铰链B:第二虎克铰链(12)中与第二转动铰链(8)轴线垂直的转动铰链为转动铰链A, 另一个转动铰链为转动铰链B。 2
CN104859745A 说明书 1/6页 一种在腰部使用变胞机构的多足仿生机器人 技术领域 [0001] 本发明属于仿生机器人技术领域,涉及一种在腰部使用变胞机构的多足仿生机器 人。 背景技术 [0002]多足仿生机器人机构简单且灵活,承载能力强、稳定性好,不仅能在复杂的非结构 路面上行走,轻易地跨过较大的障碍(如壕沟、岩石等),而且能以动态步态实现快速移动。 多足仿生机器人可以代替人完成许多危险作业,在军事、矿山开采、核能工业、星球探测、消 防营救、建筑业、农林采伐、示教娱乐等领域有着广阔的应用前景。 [0003]然而,传统多足仿生机器人在模仿动物时,关注点大多集中在腿部结构,而对于腰 部结构常常没有给予太多关注。传统多足仿生机器人腰部普遍采用刚性结构。其缺点在于: 1)腰部不可动,仅起支撑和载物平台的作用,对机器人的运动和姿势不起任何作用。2)多 足仿生机器人刚性结构的腰部,无法改变其形状,机器人各条腿的相对位置保持不变,机器 人只能通过改变腿部姿态来实现行走、奔跑、避障和转弯等动作,腰部对仿生机器人的运动 和适应性调节不起任何作用,而且刚性的腰部结构极大地限制了机器人整体工作空间和灵 活度。3)多足仿生机器人刚性腰部极大限制了机器人对自身重心的调节性能,使得机器人 行走的稳定裕度很小,步态中存在临界稳定状态,行走过程不稳定。4)步态规划方面,刚性 腰的仿生机器人步态有限,无法实现类似于动物的上下弓腰、仰腰、扭腰的动作。5)刚性腰 部无法起到缓冲减震的作用,同时也限制了行走速度。6)传统仿生机器人只能模仿特定的 一种动物,不能同时模仿多种动物的形态。 发明内容 [0004]针对传统多足爬行机器人的局限性,创造一种可变形,灵活,自适应能力更强的多 足变胞仿生机器人,本发明提供一种在腰部使用变胞机构的多足仿生机器人。 [0005]为了解决上述技术问题,本发明提出的一种在腰部使用变胞机构的多足仿生机器 人,包括一个闭链和多条开链,所述闭链是由第一杆、第二杆、第三杆、第四杆、第五杆和第 六杆构成的一个变胞六杆机构:第一杆的两端分别通过第一转动铰链和第二转动较链与第 二杆的一端和第六杆的一端相连,第一转动铰链和第二转动铰链的轴线相互平行:第四杆 的两端分别通过第三转动铰链和第四转动铰链与第三杆的一端和第五杆的一端相连,第三 转动铰链和第四转动铰链的轴线相互平形:所述第二杆和所述第六杆长度相同,所述第三 杆与所述第五杆的长度相同。第二杆和第三杆通过第一虎克铰链相连,第一虎克较链的两 条轴线中,其中一条轴线与第一转动铰链的轴线垂直,另一条轴线与第三转动铰链的轴线 平行:第六杆和第五杆通过第二虎克铰链相连,第二虎克铰链的两条轴线中,其中一条轴线 与第二转动铰链的轴线垂直,另一条轴线与第四转动铰链的轴线平行:每条开链的结构相 同,均分别包括第七杆、第八杆和第九杆,所述第七杆、第八杆和第九杆位于同一平面内:当 开链数目为四条时,每条开链中的第七杆均分别通过第七转动铰链与第二杆、第三杆、第五 3
CN104859745A 说明书 2/6页 杆和第六杆转动铰接,四条开链与第二杆、第三杆、第五杆和第六杆之间的四个第七转动铰 链的轴线与第一转动铰链的轴线平行、且落在第七杆、第八杆和第九杆所在平面内:开链数 目为六条时,每条开链中的第七杆均分别通过第七转动铰链与第一杆、第二杆、第三杆、第 四杆、第五杆和第六杆转动铰接,六条开链与第一杆、第二杆、第三杆、第四杆、第五杆和第 六杆之间的六个第七转动铰链的轴线与第一转动铰链的轴线平行,且落在第七杆、第八杆 和第九杆所在平面内。 [0006]进一步讲,每条开链均为一2R串联机构。 [0007] 第一虎克铰链中与第一转动铰链轴线垂直的转动铰链为转动铰链A,另一个转动 铰链为转动铰链B:第二虎克铰链中与第二转动铰链轴线垂直的转动铰链为转动铰链A,另 一个转动铰链为转动铰链B。 [0008]与现有技术相比,本发明的有益效果是: [0009]本发明中将变胞机构应用到多足仿生机器人的腰部,通过变胞机构在运动过程中 改变机构构态,自由度,实现了腰部构型的改变。从而更好地模仿各类动物的腰部结构,实 现对多类动物仿生,集多类动物优点于一身,包括哺乳类动物的速度、爬行类动物的灵活性 以及昆虫类动物的稳定性,进而提高多足仿生机器人的灵活性和对不同地形环境的适应能 力,实现更多的应用。 附图说明 [0010] 图1是本发明变胞多足仿生机器人的结构示意图: [0011] 图2是图1中闭链结构示意图: [0012] 图3是图1中一个开链的结构示意图: [0013] 图4是本发明变胞多足仿生机器人模仿哺乳类动物的结构示意图: [0014] 图5是本发明变胞多足仿生机器人模仿节肢类动物的结构示意图; [0015] 图6是本发明变胞多足仿生机器人模仿昆虫类动物的结构示意图; [0016] 图7是本发明变胞多足仿生机器人具有六条开链的结构示意图: [0017] 图8是本发明变胞多足仿生机器人模仿蜈蚣的示意图。 具体实施方式 [0018] 下面结合附图和具体实施例对本发明技术方案作进一步详细描述,其描述仅是对 本发明的解释性说明,并不用以限制本发明。 [0019]实施例一、在腰部使用变胞机构的多足仿生机器人,且具有四条开链结构。 [0020]如图1所示,本发明提出一种在腰部使用变胞机构的多足仿生机器人,包括一个 闭链和四条开链,所述闭链是由第一杆1、第二杆2、第三杆3、第四杆4、第五杆5和第六杆 6构成的一个变胞六杆机构。 [0021]如图2所示,第一杆1的两端分别通过第一转动较链7和第二转动铰链8与第二 杆2的一端和第六杆6的一端相连,第一转动铰链7和第二转动铰链8的轴线相互平行:第 四杆4的两端分别通过第三转动铰链9和第四转动铰链10与第三杆3的一端和第五杆5 的一端相连,第三转动铰链9和第四转动铰链10的轴线相互平形;所述第二杆2和所述第 六杆6长度相同,所述第三杆3与所述第五杆5的长度相同。第二杆2和第三杆3通过第 4
CN104859745A 说明 书 3/6页 一虎克铰链11相连,第一虎克较链11的两条轴线中,其中一条轴线与第一转动铰链7的轴 线垂直,另一条轴线与第三转动铰链9的轴线平行:第六杆6和第五杆5通过第二虎克铰链 12相连,第二虎克铰链12的两条轴线中,其中一条轴线与第二转动铰链8的轴线垂直,另一 条轴线与第四转动铰链10的轴线平行。 [0022]四条开链的结构相同,每条开链均为一2R串联机构。如图3所示,每条开链均分 别包括第七杆13、第八杆14和第九杆15,所述第七杆13、第八杆14和第九杆15位于同一 平面内,所述第八杆14的两端分别通过第五转动铰链16和第六转动铰链17与第七杆13 和第九杆15相连,所述第五转动铰链16和第六转动铰链17的轴线相互平行。 [0023]如图1所示,四条开链中的第七杆13均分别通过第七转动铰链18与第二杆2、第 三杆3、第五杆5和第六杆6转动铰接,四条开链与第二杆2、第三杆3、第五杆5和第六杆6 之间的四个第七转动铰链18的轴线与第一转动铰链7的轴线平行、且落在第七杆13、第八 杆14和第九杆15所在平面内。 [0024]本发明中,在闭链结构中如果将两个虎克铰铰链分解为两个轴线相互垂直的转动 铰链,如:第一虎克铰链11中与第一转动铰链7轴线垂直的转动铰链为转动铰链A,另一个 转动铰链为转动铰链B:第二虎克铰链12中与第二转动铰链8轴线垂直的转动铰链为转动 铰链A,另一个转动铰链为转动铰链B:则该闭链结构共包含八个转动铰链,如图2所示,在 这八个转动铰链中的第一转动铰链7、第一虎克铰链11中的转动铰链B、第三转动铰链9、第 四转动铰链10、第二虎克铰链12中的转动铰链B、第二转动铰链8中的任意三个作为驱动 再加上第一虎克铰链11中的转动铰链A和第二虎克铰链12中的转动铰链A的任意一个即 可驱动该闭链结构,同时,驱动每条开链中的所述第五转动铰链16、第六转动铰链17和连 接闭链和开链的第七转动铰链18,从而使本发明多足仿生机器人模仿多足不同形态。 [0025]本发明中可以具有多种不同的驱动形式,实际应用中可以择优选用,其择优的原 则是:保证在各种构态下都能实现完全驱动,以及驱动过程中压力角较小,另外尽可能对称 分布,以保证整个闭链结构质量分布均匀。 [0026] 下面通过选取闭链中的第一转动铰链7、第三转动铰链9、第四转动铰链10以及第 二虎克铰链12中的转动铰链A为驱动关节进行说明 [0027]因为本发明变胞多足仿生机器人中闭链结构为一个变胞机构,因此可以通过改变 闭链构态以及相应调整四条开链的形态模仿多种动物形态。例如驱动第一转动铰链7、第三 转动铰链9、第四转动铰链10使得第一杆1与第二杆2垂直,第三杆3和第四杆4垂直,第 四杆4和第五杆5垂直,这时闭链构态为如图1种所示的矩形,很容易从图1看出,此时第 一虎克铰链11中的转动铰链A轴线与第二虎克铰链12中的转动铰链A轴线共线,因此这 时驱动第二虎克铰链12中的转动铰链A可以使得第三杆3、第四杆4和第五杆5绕着这条 共线的轴线旋转,这时通过驱动各条开链中第五转动铰链16、第六转动铰链17以及连接闭 链与各个开链的第七转动铰链18,使得第八杆14近似水平,第九杆15近似竖直,每条开链 所在平面与闭链中连接该条开链的对应杆近似垂直。这时变胞多足仿生机器人模仿的是爬 行类动物(例如蜥蜴)的形态,如图1。 [0028] 在图1基础上保持第一转动铰链7、第三转动铰链9、第四转动铰链10角度不变, 驱动第二虎克铰链12中的转动铰链A使得第三杆3、第四杆4、第五杆5所在平面与第一杆 1、第二杆2、第六杆6所在平面形成一个近似30度的夹角,同时驱动每条开链中的第五转动 5