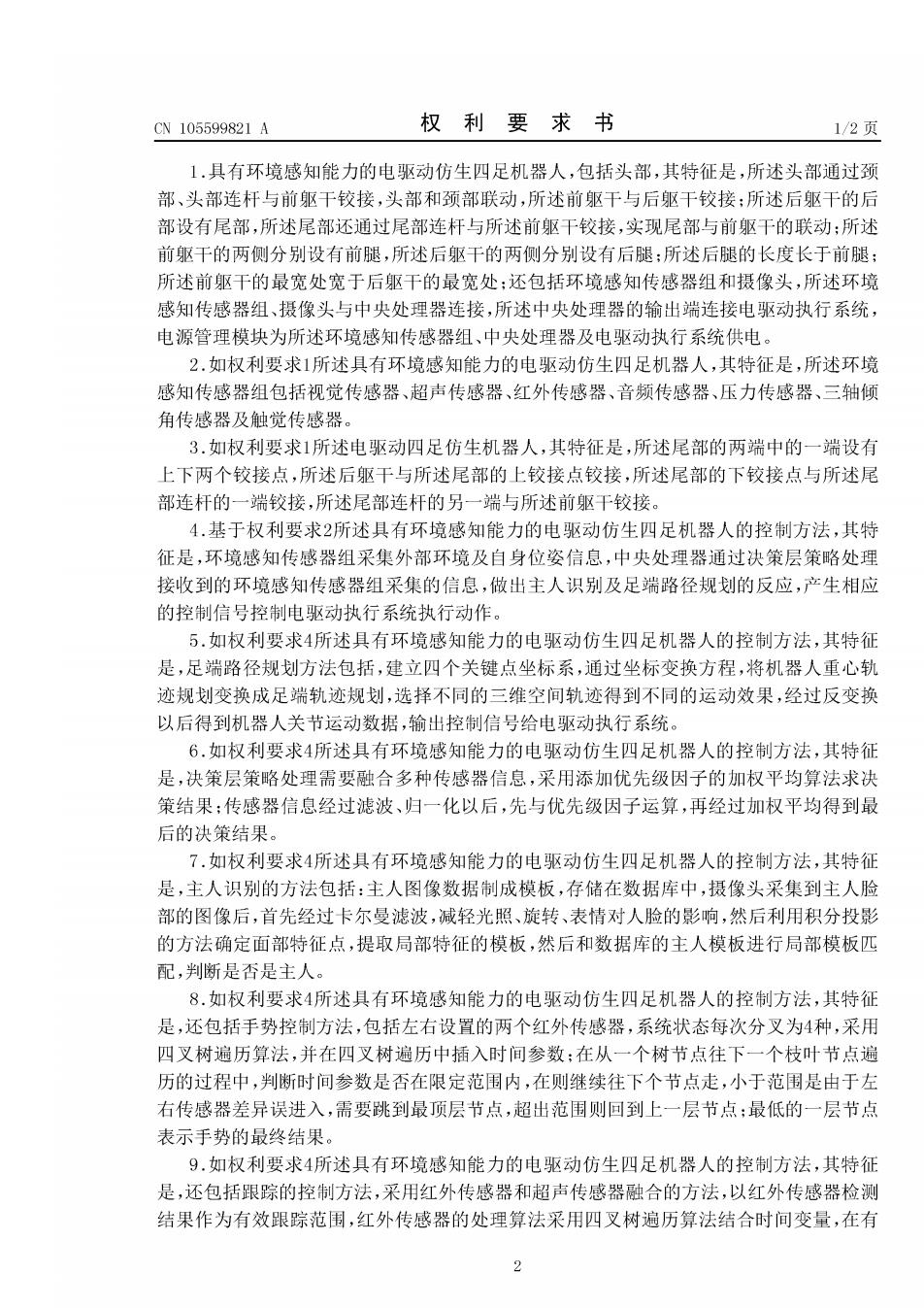
(19)中华人民共和国国家知识产权局 ▣▣ (12)发明专利申请 可 (10)申请公布号CN105599821A (43)申请公布日2016.05.25 (21)申请号201610006061.8 (22)申请日2016.01.06 (71)申请人山东优宝特智能机器人有限公司 地址250101山东省济南市高新区新泺大街 1166号奥盛大厦3号楼2103 (72)发明人范永谢爱珍 (74)专利代理机构济南圣达知识产权代理有限 公司37221 代理人张勇 (51)nt.Cl. B62D57/032(2006.01) G05B1904(2006.01) 权利要求书2页说明书7页附图5页 (54)发明名称 具有环境感知能力的电驱动仿生四足机器人 及控制方法 (57)摘要 本发明公开了具有环境感知能力的电驱动仿 样觉处纸器 生四足机器人及控制方法,头部通过颈部、头部连 位首和方平 杆与前躯干铰接,头部和颈部联动,前躯干与后躯 环境炒:郊器 反坡 电对执音余流 干铰接;后躯干的后部设有尾部,尾部还通过尾 部连杆与前躯干铰接:前躯干的两侧分别设有前 包解你息 腿,后躯干的两侧分别设有后腿:后腿的长度长 传感学负北 动出 于前腿:前躯干的最宽处宽于后躯干的最宽处: 还包括环境感知传感器组和摄像头,环境感知传 感器组、摄像头与中央处理器连接,中央处理器的 输出端连接电驱动执行系统,电源管理模块为环 境感知传感器组、中央处理器及电驱动执行系统 供电。采用电驱动控制方式,实现仿生四足机器人 对环境的动态感知、自主导航、实时跟随,以及适 应地形变化和随机干扰的仿生步态运动规划。 33669901 石
CN105599821A 权利要求书 1/2页 1.具有环境感知能力的电驱动仿生四足机器人,包括头部,其特征是,所述头部通过颈 部、头部连杆与前躯干铰接,头部和颈部联动,所述前躯干与后躯干铰接:所述后躯干的后 部设有尾部,所述尾部还通过尾部连杆与所述前躯干铰接,实现尾部与前躯干的联动:所述 前躯干的两侧分别设有前腿,所述后躯干的两侧分别设有后腿:所述后腿的长度长于前腿; 所述前躯干的最宽处宽于后躯干的最宽处:还包括环境感知传感器组和摄像头,所述环境 感知传感器组、摄像头与中央处理器连接,所述中央处理器的输出端连接电驱动执行系统, 电源管理模块为所述环境感知传感器组、中央处理器及电驱动执行系统供电。 2.如权利要求1所述具有环境感知能力的电驱动仿生四足机器人,其特征是,所述环境 感知传感器组包括视觉传感器、超声传感器、红外传感器、音频传感器、压力传感器、三轴倾 角传感器及触觉传感器。 3.如权利要求1所述电驱动四足仿生机器人,其特征是,所述尾部的两端中的一端设有 上下两个铰接点,所述后躯干与所述尾部的上铰接点铰接,所述尾部的下铰接点与所述尾 部连杆的一端铰接,所述尾部连杆的另一端与所述前躯干铰接。 4.基于权利要求2所述具有环境感知能力的电驱动仿生四足机器人的控制方法,其特 征是,环境感知传感器组采集外部环境及自身位姿信息,中央处理器通过决策层策略处理 接收到的环境感知传感器组采集的信息,做出主人识别及足端路径规划的反应,产生相应 的控制信号控制电驱动执行系统执行动作。 5.如权利要求4所述具有环境感知能力的电驱动仿生四足机器人的控制方法,其特征 是,足端路径规划方法包括,建立四个关键点坐标系,通过坐标变换方程,将机器人重心轨 迹规划变换成足端轨迹规划,选择不同的三维空间轨迹得到不同的运动效果,经过反变换 以后得到机器人关节运动数据,输出控制信号给电驱动执行系统。 6.如权利要求4所述具有环境感知能力的电驱动仿生四足机器人的控制方法,其特征 是,决策层策略处理需要融合多种传感器信息,采用添加优先级因子的加权平均算法求决 策结果:传感器信息经过滤波、归一化以后,先与优先级因子运算,再经过加权平均得到最 后的决策结果。 7.如权利要求4所述具有环境感知能力的电驱动仿生四足机器人的控制方法,其特征 是,主人识别的方法包括:主人图像数据制成模板,存储在数据库中,摄像头采集到主人脸 部的图像后,首先经过卡尔曼滤波,减轻光照、旋转、表情对人脸的影响,然后利用积分投影 的方法确定面部特征点,提取局部特征的模板,然后和数据库的主人模板进行局部模板匹 配,判断是否是主人。 8.如权利要求4所述具有环境感知能力的电驱动仿生四足机器人的控制方法,其特征 是,还包括手势控制方法,包括左右设置的两个红外传感器,系统状态每次分叉为4种,采用 四叉树遍历算法,并在四叉树遍历中插入时间参数:在从一个树节点往下一个枝叶节点遍 历的过程中,判断时间参数是否在限定范围内,在则继续往下个节点走,小于范围是由于左 右传感器差异误进入,需要跳到最顶层节点,超出范围则回到上一层节点:最低的一层节点 表示手势的最终结果。 9.如权利要求4所述具有环境感知能力的电驱动仿生四足机器人的控制方法,其特征 是,还包括跟踪的控制方法,采用红外传感器和超声传感器融合的方法,以红外传感器检测 结果作为有效跟踪范围,红外传感器的处理算法采用四叉树遍历算法结合时间变量,在有 2

CN105599821A 权利要求书 2/2页 效跟踪范围内加上超声传感器处理算法整数规划算法,超声波的距离数据作为变量,决策 因子是一个经过调试设定的固定值,距离数据和决策因子的乘积结果作为运动结果参考 量,运动结果参考量经过割平面法最终得到运动结果。 10.如权利要求4所述具有环境感知能力的电驱动仿生四足机器人的控制方法,其特征 是,行走采用滑步步态规划,平衡控制策略选用机器人稳定性判据中的稳定裕量,当稳定裕 量超出稳定范围值时,结合下蹲策略和挥臂策略来调整机器人的姿态,直到恢复稳定状态。 3
CN105599821A 说明书 1/7页 具有环境感知能力的电驱动仿生四足机器人及控制方法 技术领域 [0001]本发明涉及仿生机器人技术领域,尤其涉及一种具有环境感知能力的电驱动仿生 四足机器人及控制方法。 背景技术 [0002]从机器人运动方式来看,机器人大致可分为轮式机器人、履带式机器人和腿足式 机器人三类。相对于轮式或履带式机器人,腿足式运动具有轮式或履带式所不具备的优越 特性: [0003] (1)腿足式运动的落足点是离散的,可以在足的可达空间内选择最优支撑点,可以 跨越障碍,提高了对崎岖地面的适应能力。 [0004] (2)腿足式运动能实现全方位移动,运动更加灵活。 [0005](3)腿足式运动可以主动隔振,即躯干质心运动轨迹与足端轨迹解耦,在地面高低 不平时身体仍可保持平稳。 [0006] (4)腿足式运动在不平坦或松散地面上仍能实现较高的移动速度,能耗不会显著 增加。 [0007]当前,世界范围内,一些国家对四足机器人展开了广泛的研究,取得了丰硕的成 果,尤其是美国波士顿动力(Boston Dynamics)发布了液压四足机器人BigDog之后,在世界 范围内掀起了研究液压四足机器人的热潮,如韩国工业技术研究院研发了液压马达驱动的 四足机器人,意大利理工学院研发了电液混合驱动的四足机器人HyQ,随后波士顿动力又发 布了AlphaDog和LS3四足机器人,在抗扰动、负载能力和环境适应能力方面有了大幅度提 升。 [0008]在国内,清华大学、山东大学、哈尔滨工业大学和华中科技大学等高校也在从事四 足仿生机器人的研发工作,并取得了一定的成果。 [0009] 从目前的研究来看,四足机器人的驱动方式分为液压驱动和电驱动两大类。 [0010] 液压驱动四足机器人在高动态性、高负载能力方面具备其优势,但存在功耗大和 噪音大等问题。 [0011]电驱动四足机器人的自由度相对较少,运动不够灵活:对环境的感知能力差,难以 适应复杂的地面运动。 发明内容 [0012]本发明的目的就是为了解决上述问题,提供了一种具有环境感知能力的电驱动仿 生四足机器人及控制方法,模拟四足哺乳动物体态,设计头部、躯干、腿部和尾部,集成多传 感器,包括视觉传感器、超声传感器、红外传感器、音频传感器、压力传感器、三轴倾角传感 器、触觉传感器等,采用电驱动控制方式,实现仿生四足机器人对环境的动态感知、自主导 航、实时跟随,以及适应地形变化和随机干扰的仿生步态运动规划。 [0013]为了实现上述目的,本发明采用如下技术方案:

CN105599821A 说明书 2/7页 [0014] 具有环境感知能力的电驱动仿生四足机器人,包括头部,所述头部通过颈部、头部 连杆与前躯干铰接,头部和颈部联动,所述前躯干与后躯干铰接:所述后躯干的后部设有尾 部,所述尾部还通过尾部连杆与所述前躯干较接,实现尾部与前躯干的联动:所述前躯干的 两侧分别设有前腿,所述后躯干的两侧分别设有后腿:所述后腿的长度长于前腿:所述前躯 干的最宽处宽于后躯干的最宽处:还包括环境感知传感器组和摄像头,所述环境感知传感 器组、摄像头与中央处理器连接,所述中央处理器的输出端连接电驱动执行系统,电源管理 模块为所述环境感知传感器组、中央处理器及电驱动执行系统供电。 [0015]所述环境感知传感器组包括视觉传感器、超声传感器、红外传感器、音频传感器、 压力传感器、三轴倾角传感器及触觉传感器。 [O016]所述尾部的两端中的一端设有上下两个铰接点,所述后躯干与所述尾部的上铰接 点铰接,所述尾部的下铰接点与所述尾部连杆的一端铰接,所述尾部连杆的另一端与所述 前躯干铰接。 [0017]具有环境感知能力的电驱动仿生四足机器人的控制方法,环境感知传感器组采集 外部环境及自身位姿信息,中央处理器通过决策层策略处理接收到的环境感知传感器组采 集的信息,做出主人识别及足端路径规划的反应,产生相应的控制信号控制电驱动执行系 统执行动作。 [0018]足端路径规划方法包括,建立四个关键点坐标系,通过坐标变换方程,将机器人重 心轨迹规划变换成足端轨迹规划,选择不同的三维空间轨迹得到不同的运动效果,经过反 变换以后得到机器人关节运动数据,输出控制信号给电驱动执行系统。 [0019]决策层策略处理需要融合多种传感器信息,采用添加优先级因子的加权平均算法 求决策结果:传感器信息经过滤波、归一化以后,先与优先级因子运算,再经过加权平均得 到最后的决策结果。 [0020]主人识别的方法包括:主人图像数据制成模板,存储在数据库中,摄像头采集到主 人脸部的图像后,首先经过卡尔曼滤波,减轻光照、旋转、表情对人脸的影响,然后利用积分 投影的方法确定面部特征点,提取局部特征的模板,然后和数据库的主人模板进行局部模 板匹配,判断是否是主人。 [0021]还包括手势控制方法,包括左右设置的两个红外传感器,系统状态每次分叉为4 种,采用四叉树遍历算法,并在四叉树遍历中插入时间参数:在从一个树节点往下一个枝叶 节点遍历的过程中,判断时间参数是否在限定范围内,在则继续往下个节点走,小于范围是 由于左右传感器差异误进入,需要跳到最顶层节点,超出范围则回到上一层节点:最低的一 层节点表示手势的最终结果。 [0022]还包括跟踪的控制方法,采用红外传感器和超声传感器融合的方法,以红外传感 器检测结果作为有效跟踪范围,红外传感器的处理算法采用四叉树遍历算法结合时间变 量,在有效跟踪范围内加上超声传感器处理算法整数规划算法,超声波的距离数据作为变 量,决策因子是一个经过调试设定的固定值,距离数据和决策因子的乘积结果作为运动结 果参考量,运动结果参考量经过割平面法最终得到运动结果。 [0023]行走采用滑步步态规划,平衡控制策略选用机器人稳定性判据中的稳定裕量,当 稳定裕量超出稳定范围值时,结合下蹲策略和挥臂策略来调整机器人的姿态,直到恢复稳 定状态。 5