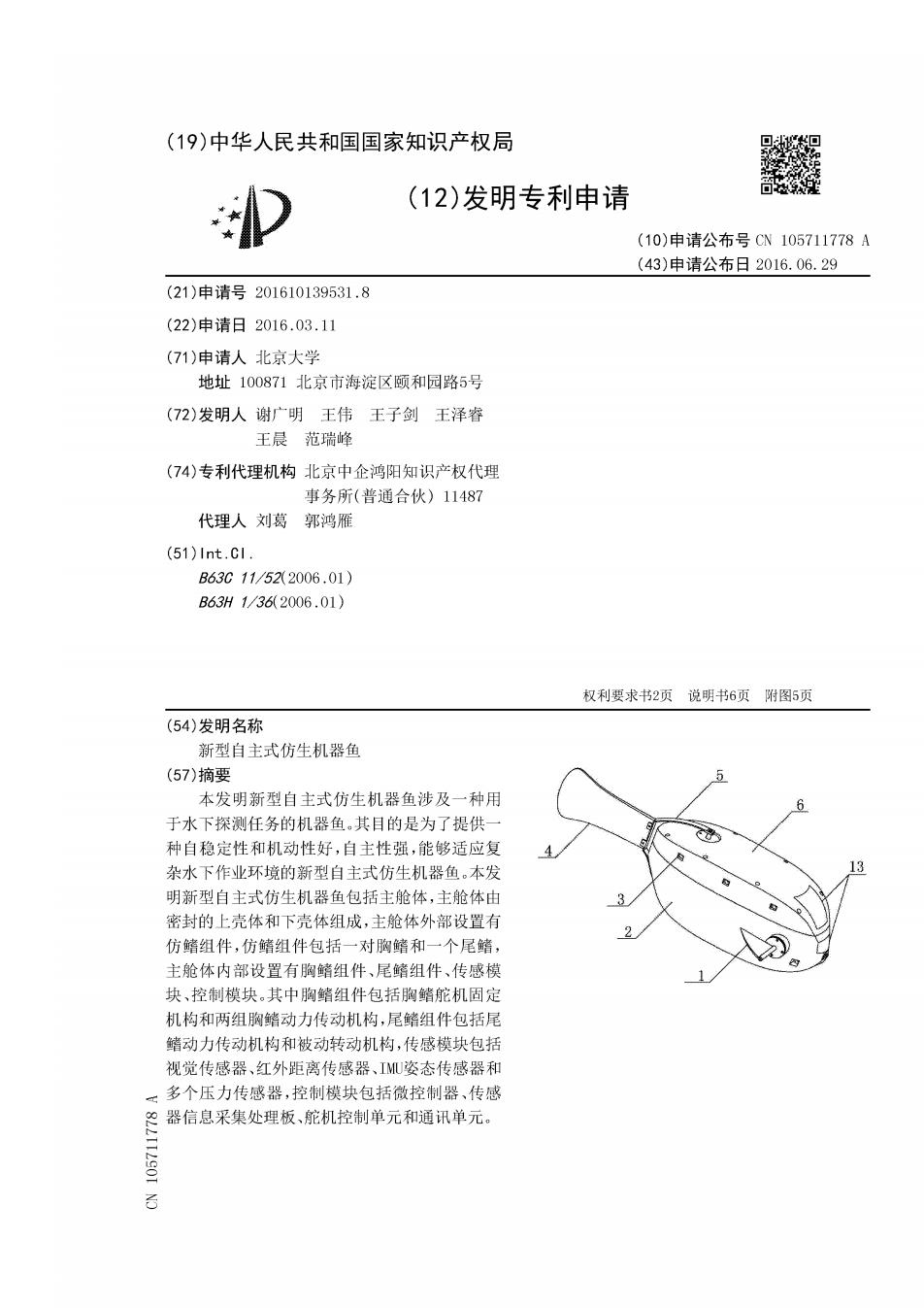
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN105711778A (43)申请公布日2016.06.29 (21)申请号201610139531.8 (22)申请日2016.03.11 (71)申请人北京大学 地址100871北京市海淀区颐和园路5号 (72)发明人谢广明王伟王子剑王泽睿 王晨范瑞峰 (74)专利代理机构北京中企鸿阳知识产权代理 事务所(普通合伙)11487 代理人刘葛郭鸿雁 (51)nt.Cl. B63C11/52(2006.01) B63H1/36(2006.01) 权利要求书2页说明书6页附图5页 (54)发明名称 新型自主式仿生机器鱼 (57)摘要 本发明新型自主式仿生机器鱼涉及一种用 于水下探测任务的机器鱼。其目的是为了提供一 种自稳定性和机动性好,自主性强,能够适应复 4 杂水下作业环境的新型自主式仿生机器鱼。本发 明新型自主式仿生机器鱼包括主舱体,主舱体由 密封的上壳体和下壳体组成,主舱体外部设置有 仿鳍组件,仿鳍组件包括一对胸鳍和一个尾鳍, 主舱体内部设置有胸鳍组件、尾鳍组件、传感模 块、控制模块。其中胸鳍组件包括胸鳍舵机固定 机构和两组胸鳍动力传动机构,尾鳍组件包括尾 鳍动力传动机构和被动转动机构,传感模块包括 视觉传感器、红外距离传感器、IMU姿态传感器和 <多个压力传感器,控制模块包括微控制器、传感 理板,舵机控制单元 石

CN105711778A 权利要求书 1/2页 1.一种新型自主式仿生机器鱼,包括主舱体,主舱体由密封的上壳体和下壳体组成,主 舱体外部设置有仿鳍组件,仿鳍组件包括一对胸鳍和一个尾鳍,其特征在于:主舱体内部设 置有胸鳍组件、尾鳍组件、传感模块、控制模块,其中: 胸鳍组件包括胸鳍舵机固定机构和两组胸鳍动力传动机构,胸鳍舵机固定机构固定有 第一胸鳍舵机和第二胸鳍舵机,第一胸鳍舵机通过第一输出机构转盘连接有第一锥齿轮, 第二胸鳍舵机通过第二输出机构转盘与锥齿轮连接件一端相连,锥齿轮连接件上固定安装 有第二锥齿轮,第一锥齿轮和第二锥齿轮的尺寸相同且齿面相对,胸鳍动力传动机构包括 胸鳍输出轴,胸鳍输出轴上固定有输出锥齿轮,两个输出锥齿轮分别与第一锥齿轮和第二 锥齿轮啮合,胸鳍输出轴经过密封后伸出到主舱体外侧,伸出到主舱体外侧的胸鳍输出轴 轴体上加工有滑槽,滑槽内安装有胸鳍: 尾鳍组件包括尾鳍动力传动机构和被动转动机构,尾鳍动力传动机构中设置有尾鳍输 出轴,被动转动机构中设置有被动转轴,尾鳍输出轴和被动转轴共同连接有尾鳍固定支架, 尾鳍固定支架上安装有尾鳍; 传感模块包括视觉传感器、红外距离传感器、IM姿态传感器和多个压力传感器,视觉 传感器和红外距离传感器位于主舱体内部的前端,所述视觉传感器用于捕捉所述主舱体外 部的图像信息,所述红外距离传感器用于探测所述主舱体外的红外信号,生成红外探测信 息以感知障碍物的存在:主舱体上对应位置设置有观察窗,IMU姿态传感器放置于胸鳍舵机 固定机构上方,MU姿态传感器用于采集所述机器鱼的的姿态信息,多个压力传感器阵列分 布在主舱体前部和左右两侧,用于采集所述机器鱼周边环境的压力信息: 控制模块包括微控制器、传感器信息采集处理板、舵机控制单元和通讯单元,传感器信 息采集处理板用于接收来自所述传感模块的环境监测信息,其中,所述环境监测信息包括: 图像信息、红外探测信息、姿态信息和压力信息,并经过初步处理发送至微控制器,微控制 器用于对所述环境监测信息进行融合分析,根据融合分析结果生成控制指令并发送给舵机 控制单元,所述舵机控制单元根据所述控制指令驱动第一胸鳍舵机、第二胸鳍舵机和尾鳍 舵机执行相应的动作: 同时所述微控制器将所述控制指令和环境监测信息发送至所述通讯单元,由所述通讯 单元进一步转发至远程控制中心,以实现所述远程控制中心实时掌握机器鱼的所在环境状 态和工作状态。 2.根据权利要求1所述的新型自主式仿生机器鱼,其特征在于:还包括电源模块和配重 块,电源模块位于主舱体中部,采用充电式航模动力镍氢电池,电压为11V,配重块安装在电 池模块上部,选用铝锌合金块。 3.根据权利要求1所述的新型自主式仿生机器鱼,其特征在于:所述胸鳍组件位于主舱 体前部左右两侧,胸鳍舵机固定机构包括胸鳍舵机固定架,胸鳍舵机固定架上并列安装有 若干个滑动件,滑动件用于安装第一胸鳍舵机和第二胸鳍舵机,第一胸鳍舵机和第二胸鳍 舵机能够随滑动件在胸鳍舵机固定架上横向移动和锁紧。 4.根据权利要求1所述的新型自主式仿生机器鱼,其特征在于:所述胸鳍动力传动机构 中输出锥齿轮与第一锥齿轮和第二锥齿轮的传动比均为2.5:1,胸鳍动力传动机构的旋转 角为225°。 5.根据权利要求1所述的新型自主式仿生机器鱼,其特征在于:所述胸鳍输出轴上加工 2
CN105711778A 权利要求书 2/2页 有内限位凸台,胸鳍输出轴上还依次安装有内轴承、输出轴挡圈、外轴承、胸鳍动密封圈和 胸鳍端盖,且内轴承、输出轴挡圈和外轴承依次紧密接触,胸鳍输出轴上还套有胸鳍套筒, 胸鳍套筒内侧加工有外限位凸台,内轴承的内侧面与内限位凸台的外侧面相接触,外轴承 的外侧面与外限位凸台的内侧面相接触,内轴承、输出轴挡圈和外轴承用于固定胸鳍输出 轴,胸鳍动密封圈周向与胸鳍套筒的内壁相接触,胸鳍动密封圈外侧面与胸鳍端盖相接触, 胸鳍端盖与胸鳍套筒外侧面固定连接,胸鳍套筒中部外侧开有一槽口用于放置0型圈。 6.根据权利要求1所述的新型自主式仿生机器鱼,其特征在于:所述尾鳍组件位于主舱 体后部,尾鳍动力传动机构包括尾鳍舵机,尾鳍舵机安装在尾鳍舵机固定架上,尾鳍舵机固 定架固定在下壳体上,尾鳍舵机通过第三输出转盘与尾鳍输出轴相连,尾鳍输出轴上依次 安装有定位轴承、定位挡圈、尾鳍动密封圈和尾鳍上端盖和尾鳍套筒,尾鳍套筒套在定位轴 承、定位挡圈和尾鳍动密封圈外侧,尾鳍套筒与尾鳍上端盖固定连接,尾鳍上端盖与上壳体 固定连接,被动转动机构包括尾鳍下端盖,尾鳍下端盖与下壳体固定连接,尾鳍下端盖中部 用于安装被动转轴。 7.根据权利要求1所述的新型自主式仿生机器鱼,其特征在于:所述压力传感器置于防 水的压力传感器模块中,压力传感器模块连接有航空连接插件,航空连接插件嵌入主舱体 内。 8.根据权利要求1所述的新型自主式仿生机器鱼,其特征在于:所述微控制器选用树莓 派主控制板,传感器信息采集处理板与微控制器、微控制器与舵机控制单元之间的信号传 输采用IIC协议。 9.根据权利要求1所述的新型自主式仿生机器鱼,其特征在于:所述主舱体前部为流线 型,左右两侧呈内凹的流线型,主舱体的上壳体材质为工程塑料,下壳体材质为硬铝,上壳 体和下壳体之间通过0型圈实现静密封防水。 10.根据权利要求1所述的新型自主式仿生机器鱼,其特征在于:所述仿鳍组件包括碳 棒纤维和塑料蒙皮,碳棒纤维作为骨架,塑料蒙皮覆盖在碳棒纤维外侧。 3
CN105711778A 说明书 1/6页 新型自主式仿生机器鱼 技术领域 [0001] 本发明涉及一种机器鱼,特别是涉及一种用于水下探测任务的新型自主式仿生机 器鱼。 背景技术 [0002]无论是海洋资源的探索,海水变化信息收集,海洋生物研究或者军事侦查和情报 的收集都依赖于水下技术的发展水平。随着人类对海洋空间及海底资源越来越深入的探索 挖掘,传统的水下推进方式推进己不能满足需求。随着仿生学、电子技术、材料科学和控制 技术的发展,研究人员开始模仿自然界鱼类的运动方式并希望获得像鱼类一样卓越游动性 能和高效推进效率的水下推进器。自1994年MIT研制成功了世界上第一条真正意义上的仿 生机器鱼,仿生机器鱼逐渐成为了国内外研究的热点,人们期望研制出体积小、成本低、推 进效率高、机动性高并且智能程度高的水下仿生机器鱼。 [0003]目前研究者大多关注鱼类中的鲹科类,研制出了很多仿参科类机器鱼,并在此基 础上开展了鱼类游动机理、推进效率和机动性能多方面的研究。但自然界有一种箱鲀科鱼 类,和鲹科鱼类相比,有着更高的机动性和自稳定性,同时拥有较高的推进效率。这些卓越 的游动特性值得人们去深入研究,以提高仿生推进器的机动性能和自稳定性,但目前却没 有引起太多研究人员的关注。如中国发明专利CN101758916A中公开的一种自主式机器 鱼,包括主舱体,主舱体有密封的上壳体和下壳体构成,主舱体通过胸鳍推进机构和尾鳍推 进机构分别控制胸鳍和尾鳍,主舱体内设置有摄像头用于信息采集,并设置有通信模块用 于外界进行信息传递。这种机器鱼只能做简单的水下运动,并不能自主地获取自身状态信 息以及多方位的获取周围环境的信息,而其较低的自主性限制了其在水下自主地完成指定 的任务的能力,遇到水下复杂的环境时可能出现故障而无法完成任务甚至无法返航造成大 的损失。 发明内容 [0004]本发明要解决的技术问题是提供一种自稳定性和机动性好,自主性强,能够适应 复杂水下作业环境的新型自主式仿生机器鱼。 [0005]本发明新型自主式仿生机器鱼,包括主舱体,主舱体由密封的上壳体和下壳体组 成,主舱体外部设置有仿鳍组件,仿鳍组件包括一对胸鳍和一个尾鳍,主舱体内部设置有胸 鳍组件、尾鳍组件、传感模块、控制模块,其中: [0006]胸鳍组件包括胸鳍舵机固定机构和两组胸鳍动力传动机构,胸鳍舵机固定机构固 定有第一胸鳍舵机和第二胸鳍舵机,第一胸鳍舵机通过第一输出机构转盘连接有第一锥齿 轮,第二胸鳍舵机通过第二输出机构转盘与锥齿轮连接件一端相连,锥齿轮连接件上固定 安装有第二锥齿轮,第一锥齿轮和第二锥齿轮的尺寸相同且齿面相对,胸鳍动力传动机构 包括胸鳍输出轴,胸鳍输出轴上固定有输出锥齿轮,两个输出锥齿轮分别与第一锥齿轮和 第二锥齿轮啮合,胸鳍输出轴经过密封后伸出到主舱体外侧,伸出到主舱体外侧的胸鳍输
CN105711778A 说明书 2/6页 出轴轴体上加工有滑槽,滑槽内安装有胸鳍; [0007]尾鳍组件包括尾鳍动力传动机构和被动转动机构,尾鳍动力传动机构中设置有尾 鳍输出轴,被动转动机构中设置有被动转轴,尾鳍输出轴和被动转轴共同连接有尾鳍固定 支架,尾鳍固定支架上安装有尾鳍; [0008]传感模块包括视觉传感器、红外距离传感器、IMU姿态传感器和多个压力传感器, 视觉传感器和红外距离传感器位于主舱体内部的前端,所述视觉传感器用于捕捉所述主舱 体外部的图像信息,所述红外距离传感器用于探测所述主舱体外的红外信号,生成红外探 测信息以感知障碍物的存在;主舱体上对应位置设置有观察窗,U姿态传感器放置于胸鳍 舵机固定机构上方,M姿态传感器用于采集所述机器鱼的的姿态信息,多个压力传感器阵 列分布在主舱体前部和左右两侧,用于采集所述机器鱼周边环境的压力信息: [0009]控制模块包括微控制器、传感器信息采集处理板、舵机控制单元和通讯单元,传感 器信息采集处理板用于接收来自所述传感模块的环境监测信息,其中,所述环境监测信息 包括:图像信息、红外探测信息、姿态信息和压力信息,并经过初步处理发送至微控制器,微 控制器用于对所述环境监测信息进行融合分析,根据融合分析结果生成控制指令并发送给 舵机控制单元,所述舵机控制单元根据所述控制指令驱动第一胸鳍舵机、第二胸鳍舵机和 尾鳍舵机执行相应的动作; [0010]同时所述微控制器将所述控制指令和环境监测信息发送至所述通讯单元,由所述 通讯单元进一步转发至远程控制中心,以实现所述远程控制中心实时掌握机器鱼的所在环 境状态和工作状态。 [0011]本发明新型自主式仿生机器鱼,还包括电源模块和配重块,电源模块位于主舱体 中部,采用充电式航模动力镍氢电池,电压为11V,配重块安装在电池模块上部,选用铝锌合 金块。 [0012] 本发明新型自主式仿生机器鱼,其中所述胸鳍组件位于主舱体前部左右两侧,胸 鳍舵机固定机构包括胸鳍舵机固定架,胸鳍舵机固定架上并列安装有若干个滑动件,滑动 件用于安装第一胸鳍舵机和第二胸鳍舵机,第一胸鳍舵机和第二胸鳍舵机能够随滑动件在 胸鳍舵机固定架上横向移动和锁紧。 [0013]本发明新型自主式仿生机器鱼,其中所述胸鳍动力传动机构中输出锥齿轮与第一 锥齿轮和第二锥齿轮的传动比均为2.5:1,胸鳍动力传动机构的旋转角为225°。 [0014]本发明新型自主式仿生机器鱼,其中所述胸鳍输出轴上加工有内限位凸台,胸鳍 输出轴上还依次安装有内轴承、输出轴挡圈、外轴承、胸鳍动密封圈和胸鳍端盖,且内轴承、 输出轴挡圈和外轴承依次紧密接触,胸鳍输出轴上还套有胸鳍套筒,胸鳍套筒内侧加工有 外限位凸台,内轴承的内侧面与内限位凸台的外侧面相接触,外轴承的外侧面与外限位凸 台的内侧面相接触,内轴承、输出轴挡圈和外轴承用于固定胸鳍输出轴,胸鳍动密封圈周向 与胸鳍套筒的内壁相接触,胸鳍动密封圈外侧面与胸鳍端盖相接触,胸鳍端盖与胸鳍套筒 外侧面固定连接,胸鳍套筒中部外侧开有一槽口用于放置0型圈。 [0015]本发明新型自主式仿生机器鱼,其中所述尾鳍组件位于主舱体后部,尾鳍动力传 动机构包括尾鳍舵机,尾鳍舵机安装在尾鳍舵机固定架上,尾鳍舵机固定架固定在下壳体 上,尾鳍舵机通过第三输出转盘与尾鳍输出轴相连,尾鳍输出轴上依次安装有定位轴承、定 位挡圈、尾鳍动密封圈和尾鳍上端盖和尾鳍套筒,尾鳍套筒套在定位轴承、定位挡圈和尾鳍 5