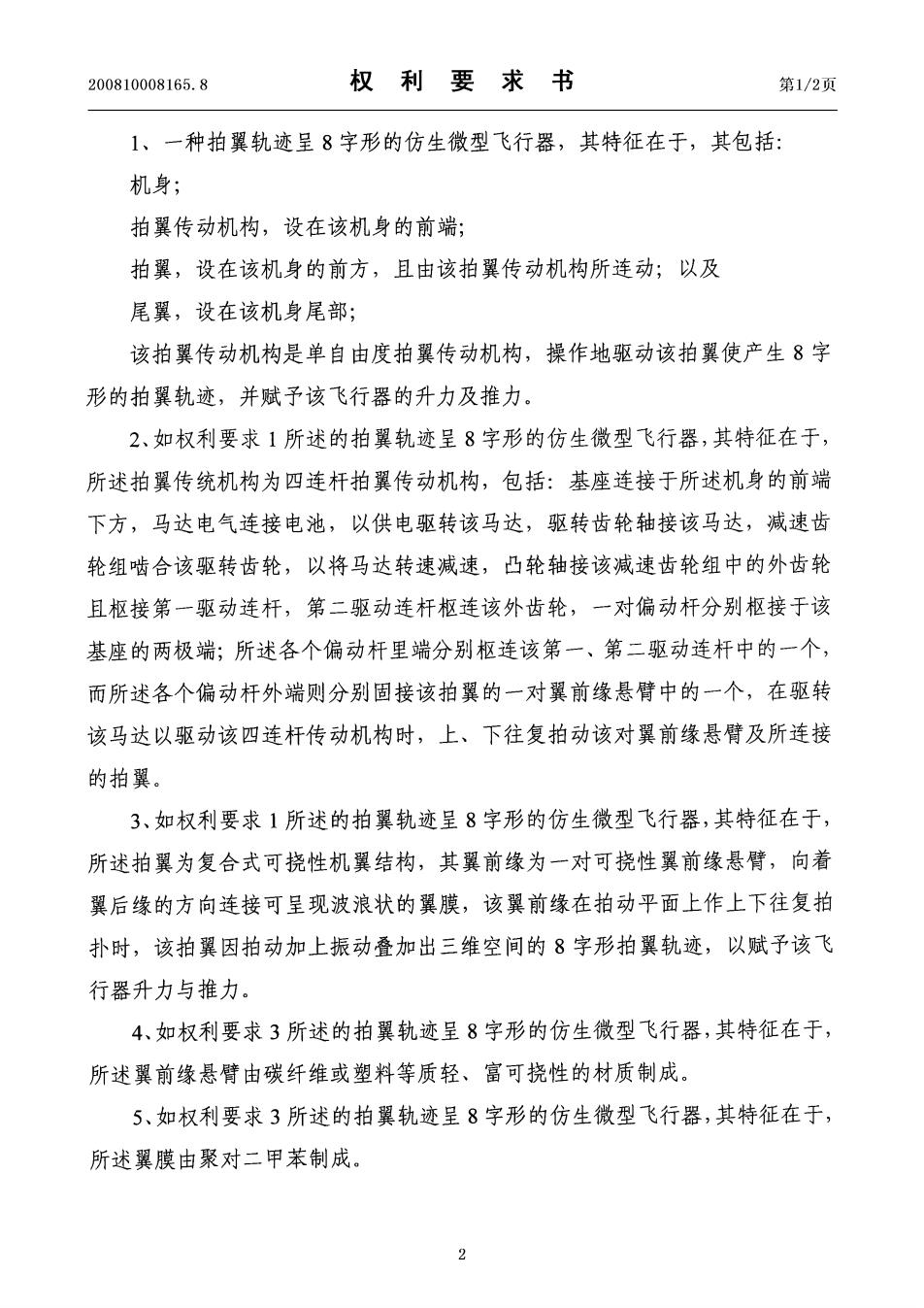
[19]中华人民共和国国家知识产权局 [51]nt.Cl. B64C33002006.01) [12]发明专利申请公布说明书 A63H27282006.01) [21]申请号200810008165.8 [43]公开日2009年8月19日 [11]公开号CN101508343A [22]申请日2008.2.14 [74]专利代理机构北京汇泽知识产权代理有限公 [21]申请号200810008165.8 司 [71]申请人私立淡江大学 代理人张瑾黄挺 地址台湾省台北县淡水锁英专路151号 [72]发明人杨龙杰 权利要求书2页说明书6页附图5页 [54]发明名称 拍翼轨迹呈8字形的仿生微型飞行器 [57]摘要 一种拍翼轨迹呈8字形的仿生(biomimetic)微型 飞行器,利用可挠式的碳纤维棒与聚对二甲苯薄 膜,分别作为掌状大小微型飞行器的机翼骨架与机 翼蒙皮。即便拍翼(齿轮连杆)传动机构只是单自 由度的四连杆(机构)设计,但上下拍翼的连动经由 可挠性机翼的材质与外型设计,成功耦合到流向的 前后振动,因此使翼尖组合出三维的8字形拍翼轨 迹;该8字形轨迹发生于接近或甚至超过20Hz的拍 3132 翼频率,由此构成构造简单的微型飞行器,可经由 33 空气弹性力学的本质而自动产生,无需借助复杂精 巧的多自由度运动机构设计
200810008165.8 权利要求书 第1/2页 1、一种拍翼轨迹呈8字形的仿生微型飞行器,其特征在于,其包括: 机身; 拍翼传动机构,设在该机身的前端; 拍翼,设在该机身的前方,且由该拍翼传动机构所连动;以及 尾翼,设在该机身尾部; 该拍翼传动机构是单自由度拍翼传动机构,操作地驱动该拍翼使产生8字 形的拍翼轨迹,并赋予该飞行器的升力及推力。 2、如权利要求1所述的拍翼轨迹呈8字形的仿生微型飞行器,其特征在于, 所述拍翼传统机构为四连杆拍翼传动机构,包括:基座连接于所述机身的前端 下方,马达电气连接电池,以供电驱转该马达,驱转齿轮轴接该马达,减速齿 轮组啮合该驱转齿轮,以将马达转速减速,凸轮轴接该减速齿轮组中的外齿轮 且枢接第一驱动连杆,第二驱动连杆枢连该外齿轮,一对偏动杆分别枢接于该 基座的两极端;所述各个偏动杆里端分别枢连该第一、第二驱动连杆中的一个, 而所述各个偏动杆外端则分别固接该拍翼的一对翼前缘悬臂中的一个,在驱转 该马达以驱动该四连杆传动机构时,上、下往复拍动该对翼前缘悬臂及所连接 的拍翼。 3、如权利要求1所述的拍翼轨迹呈8字形的仿生微型飞行器,其特征在于, 所述拍翼为复合式可挠性机翼结构,其翼前缘为一对可挠性翼前缘悬臂,向着 翼后缘的方向连接可呈现波浪状的翼膜,该翼前缘在拍动平面上作上下往复拍 扑时,该拍翼因拍动加上振动叠加出三维空间的8字形拍翼轨迹,以赋予该飞 行器升力与推力。 4、如权利要求3所述的拍翼轨迹呈8字形的仿生微型飞行器,其特征在于, 所述翼前缘悬臂由碳纤维或塑料等质轻、富可挠性的材质制成。 5、如权利要求3所述的拍翼轨迹呈8字形的仿生微型飞行器,其特征在于, 所述翼膜由聚对二甲苯制成
200810008165.8 权利要求书第2/2页 6、如权利要求1所述的拍翼轨迹呈8字形的仿生微型飞行器,其特征在于, 所述翼膜邻其翼根部开设镂空部。 7、如权利要求1所述的拍翼轨迹呈8字形的仿生微型飞行器,其特征在于, 所述翼膜连设有补强肋。 8、如权利要求1所述的拍翼轨迹呈8字形的仿生微型飞行器,其特征在于, 所述机身或所述传动机构前端加设机鼻
200810008165.8 说明书 第1/6页 拍翼轨迹呈8字形的仿生微型飞行器 技术领域 本发明涉及一种微型飞行器,尤指一种拍翼轨迹呈8字形的仿生微型飞行 器。 背景技术 为应和无人驾驶、可遥控的微型飞行器(MAV)在救援、侦察、监视、传 讯、军事或玩具上的用途,已有模仿昆虫或飞鸟拍翼飞行的微型飞行器被揭露 出来。 例如,美国专利第6,082,671号公开了多模式仿昆虫飞行器(Entomopter), 此为模仿昆虫的拍翼飞行特性以产生升力(1),但是其缺乏产生充沛推力 (thrust)的机制,因此其飞行性能倍受限制。 而一般微型拍翼飞行器(ornithopter)用来模拟昆虫或飞鸟的拍翼飞行,若 欲兼顾其升力与推力的提升,则必须具仿生的拍翼(flapping)与翻转(pitching) 机制,其机、电构造将趋复杂,且需依赖控制机制(control mechanism),在微 小化的飞行器中要配备如此复杂的机、电及控制装置,则增加了制作的困难与 成本;就连其电池或供电系统,也有载重、电力使用时间、续航力等诸多因素 有待考虑。 发明内容 有鉴于此,本发明的主要目的在于提供一种拍翼轨迹呈8字形的仿生微型 飞行器,同时具备升力和推力的飞行性能,且成本低,制作简单,适用于救援、 侦察、监视、传讯、军事或玩具等多种场合。 为达到上述目的,本发明的技术方案是这样实现的:本发明提供的拍翼轨 迹呈8字形的仿生微型飞行器包括:
200810008165.8 说明书第2/6页 机身; 拍翼传动机构,设在该机身的前端; 拍翼,设在该机身的前方,且由该传动机构所连动;以及 尾翼,设在该机身尾部; 该拍翼传动机构是单自由度拍翼传动机构,操作地驱动该拍翼使产生8字 形的拍翼轨迹,并赋予该飞行器的升力及推力。 本发明成功地将MAV往下减重到6g的范围。本发明的可挠机翼骨架配合 单自由度四连杆传动的上下拍翼机构是最简洁且适用的设计,能同时产生升力 与推力,而且碳纤棒制成的翼前缘悬臂的截面最好是圆形,另外拍翼频率须远 小于翼前缘悬臂的自然频率,以避免发生共振,而损害其结构。 附图说明 图1为本发明中飞行器的外观示意图; 图2为本发明中传动机构组合后的立体示意图; 图3为图2中各组件的立体分解图; 图4为本发明中飞行器加上机鼻的另一示意图; 图5为本发明修饰尾翼的示意图; 图5a为图5沿A-A方向的截面图; 图6为以高速电荷耦合器件图像传感器(CCD)拍摄的本发明于20.83Hz 拍翼频率下作连续飞行的实况图;其中【~P为对应A~H的侧视图(其机翼未加 补强肋);而Q~X也为对应A~H的侧视图(但机翼有加补强肋方 图7为以高速CCD拍摄本发明翼尖的8字形轨迹图(其中有加30度的补 强肋 图8为以高速CCD拍摄本发明翼尖的8字形轨迹图(其中未加30度的补 强肋)