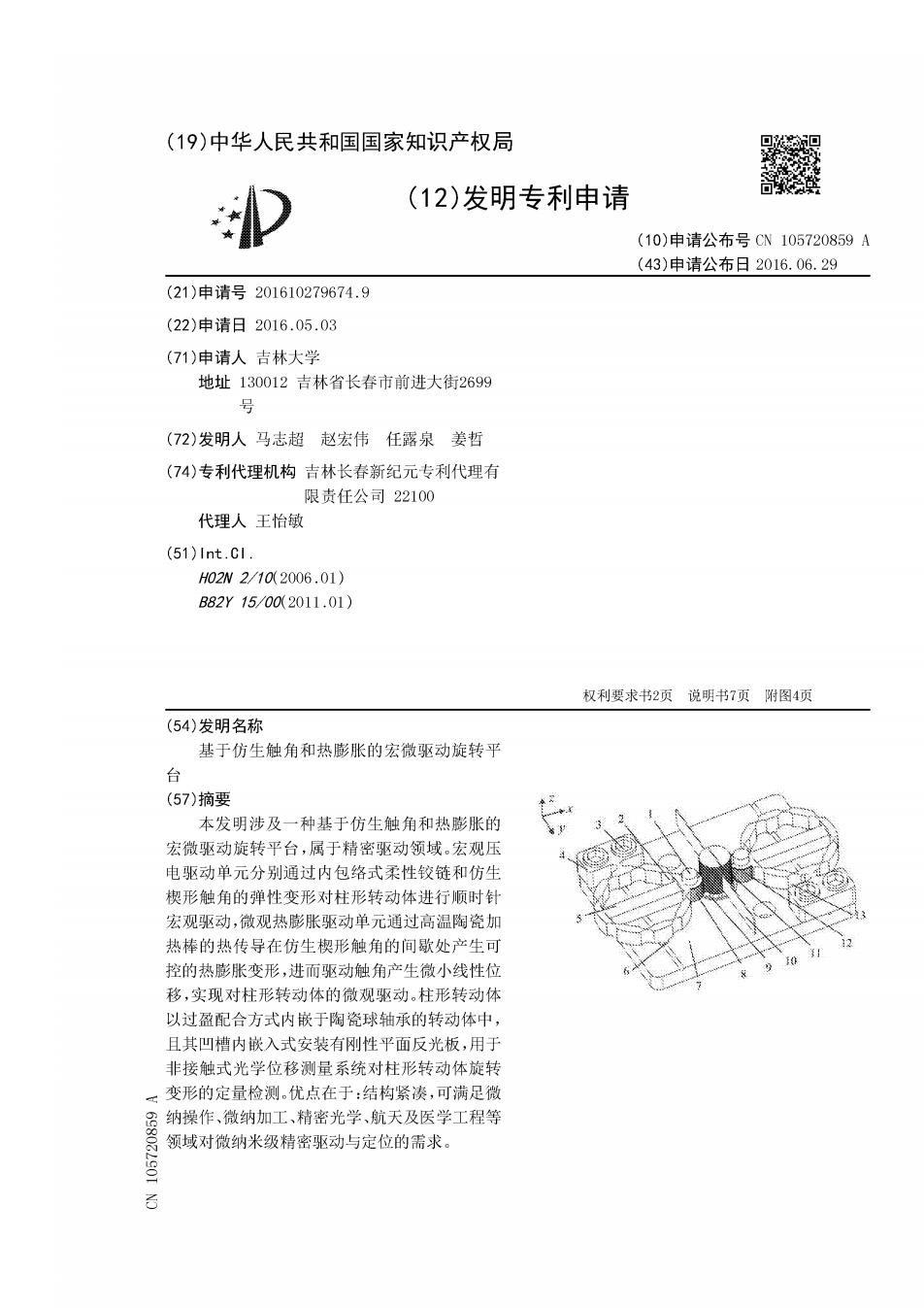
(19)中华人民共和国国家知识产权局 可只 (12)发明专利申请 (10)申请公布号CN105720859A (43)申请公布日2016.06.29 (21)申请号201610279674.9 (22)申请日2016.05.03 (71)申请人吉林大学 地址130012吉林省长春市前进大街2699 号 (72)发明人马志超赵宏伟任露泉姜哲 (74)专利代理机构吉林长春新纪元专利代理有 限责任公司22100 代理人王怡敏 (51)nt.Cl. H02N2/10(2006.01) B82Y15002011.01) 权利要求书2页说明书7页附图4页 (54)发明名称 基于仿生触角和热膨胀的宏微驱动旋转平 台 (57)摘要 本发明涉及一种基于仿生触角和热膨胀的 宏微驱动旋转平台,属于精密驱动领域。宏观压 电驱动单元分别通过内包络式柔性铰链和仿生 楔形触角的弹性变形对柱形转动体进行顺时针 宏观驱动,微观热膨胀驱动单元通过高温陶瓷加 热棒的热传导在仿生楔形触角的间歇处产生可 控的热膨胀变形,进而驱动触角产生微小线性位 移,实现对柱形转动体的微观驱动。柱形转动体 以过盈配合方式内嵌于陶瓷球轴承的转动体中, 且其凹槽内嵌入式安装有刚性平面反光板,用于 非接触式光学位移测量系统对柱形转动体旋转 <变形的定量检测。优点在于:结构紧凑,可满足微 等纳操作,微纳加工,精密光学航天及医学工程等 领域对微纳米级精密驱动与定位的需求
CN105720859A 权利要求书 1/2页 1.一种基于仿生触角和热膨胀的宏微驱动旋转平台,其特征在于:包括宏观压电驱动 单元、微观热膨胀驱动单元、微回转单元以及支撑单元,所述宏观压电驱动单元嵌入式刚性 安装在支撑单元中的基座(7)的矩形槽中,内包络式柔性铰链A、B(2、13)对称轴线的非固定 部分通过支撑单元中的硬质钢球(6)浮动于基座(7)的弧形导向槽上:微观热膨胀驱动单元 中的高温陶瓷加热棒(1)过盈安装于宏观压电驱动单元中对称式布局的内包络式柔性铰链 A、B(2、13)外侧的开槽内孔中:微回转单元中的柱形转动体(11)的圆柱母线与微观热膨胀 驱动单元中的仿生楔形触角A、B(8、12)的触点保持线弹性接触,且陶瓷球轴承(9)的外圈过 盈安装于支撑单元中的基座(7)的中心阶梯内孔中。 2.根据权利要求1所述的基于仿生触角和热膨胀的宏微驱动旋转平台,其特征在于:所 述的宏观压电驱动单元包括内包络式柔性铰链A、B(2、13)、内六角螺钉(3)、铰链刚性支撑 端(4)和压电促动器(5),所述内包络式柔性铰链A、B(2、13)具有圆环形拓扑结构,且分别具 有八处圆弧过渡式的柔性结构,铰链刚性支撑端(4)通过内六角螺钉(3)与基座(7)连接,一 组压电促动器(5)具有输出位移自检测功能并同轴、共面、对称安装于内包络式柔性铰链A、 B(2、13)的刚性内侧壁之间,其对称轴为柱形转动体(11)的中轴线。 3.根据权利要求1所述的基于仿生触角和热膨胀的宏微驱动旋转平台,其特征在于:所 述的微观热膨胀驱动单元包括一组高温陶瓷加热棒(1)和仿生楔形触角A、B(8、12),所述高 温陶瓷加热棒(1)以柱形转动体(11)的中轴线为对称轴安装在内包络式柔性铰链A、B(2、 13)外侧的开槽内孔中,仿生楔形触角A、B(8、12)具有弧形“月牙式”的阵列微结构,且附着 在内包络式柔性铰链A、B(2、13)外侧的开槽圆柱外表面。 4.根据权利要求1所述的基于仿生触角和热膨胀的宏微驱动旋转平台,其特征在于:所 述的微回转单元包括陶瓷球轴承(9)、刚性平面反光板(10)和柱形转动体(11),所述柱形转 动体(11)的阶梯轴过盈安装在陶瓷球轴承(9)内圈中,刚性平面反光板(10)为具有反光特 性的非透明硅片,用于对微转角进行入射和反射光路探测,内嵌安装在柱形转动体(11)的 矩形凹槽中: 所述的支撑单元包括一组硬质钢球(6)和基座(7),所述硬质钢球(6)安装在基座(7)的 弧形导向凹槽中,并与内包络式柔性铰链A、B(2、13)下表面的内凹槽保持弹性点接触,基座 (7)的上表面,除弧形导向凹槽处,整体涂覆有厚度为0.5mm的TDD真空绝热涂层材料,以削 弱高温陶瓷加热棒(1)的高温热辐射对基座(7)的热变形影响:此外,基座(7)加工有一组螺 纹孔,与气浮隔振台或高分辨显微镜调整平台的定位与安装。 5.根据权利要求1或2或3所述的基于仿生触角和热膨胀的宏微驱动旋转平台,其特征 在于:所述的内包络式柔性铰链A、B(2、13)与较链刚性支撑端(4)之间采用可转动式的圆弧 形柔性结构进行连接,即可实现对称式内包络式柔性较链A、B(2、13)在其环形拓扑平面上 的旋转自由度,在仿生楔形触角A、B(8、12)的触点与柱形转动体(11)外圆柱面间的接触载 荷过大的情况下,该圆弧形柔性结构可沿背离触点接触区域的防线产生扭转变形以降低局 部接触区域的接触应力,对柱形转动体(11)的宏观旋转驱动过程起到缓冲、减震的作用:内 包络式柔性铰链A、B(2、13)的八处圆弧过渡式的柔性结构亦呈现对称布局形式,结合一组 同轴且对称安装的压电促动器(5)在加载过程中的等幅、等频、同步位移输出,一组内包络 式柔性铰链A、B(2、13)外侧的开槽圆柱中心轴线相应地输出等幅、等频、等力矩且方向相反 的位移,即可通过粘滑摩擦驱动柱形转动体(11)产生步幅在微弧度级的宏观旋转运动。 2
CN105720859A 权利要求书 2/2页 6.根据权利要求1或3所述的基于仿生触角和热膨胀的宏微驱动旋转平台,其特征在 于:所述的仿生楔形触角A、B(8、12)沿内包络式柔性铰链A、B(2、13)的开槽圆柱面均布周向 排列,内包络式柔性铰链A、B(2、13)通过其外侧开槽圆柱表面附着的仿生楔形触角A、B(8、 12)与柱形转动体(11)始终保持弹性接触;具有弧形“月牙式”结构特征的仿生楔形触角A、B (8、12)的曲率半径为亚毫米级,当向一组压电促动器(5)施加等幅、等频的正电压时,仿生 楔形触角A、B(8、12)尖端的运动方向朝向其“月牙式”弧线的圆心,且触角尖端与柱形转动 体(11)的非光滑外圆柱面始终保持弹性点接触:当一组压电促动器(5)轴向加载时,仿生楔 形触角A、B(8、12)可驱动柱形转动体(11)顺时针方向步进旋转,当压电促动器(5)轴向快速 卸载时,柱形转动体(11)可保持其当前位置不发生变化,即仿生楔形触角A、B(8、12)具有正 向宏观驱动和反向惯性滑行的作用。 7.根据权利要求1或2或3所述的基于仿生触角和热膨胀的宏微驱动旋转平台,其特征 在于:所述的内包络式柔性铰链A、B(2、13)浮动端的下表面和基座(7)的上表面分别加工有 曲率半径一致的弧形导向凹槽,单个硬质钢珠(6)的球径小于凹槽的曲率半径,硬质钢珠 (6)与弧形导向凹槽始终保持弹性点接触,即以滚动摩擦而非滑动摩擦方式对内包络式柔 性较链A、B(2、13)的变形进行导向,以克服内包络式柔性铰链A、B(2、13)在极小变形情况下 的静摩擦力和驱动负载。 8.根据权利要求1所述的基于仿生触角和热膨胀的宏微驱动旋转平台,其特征在于:通 过过盈安装在内包络式柔性铰链A、B(2、13)外侧开槽内孔中的一组高温陶瓷加热棒(1)的 热膨胀变形实现微观旋转驱动:当高温陶瓷加热棒(1)的发热功率不同时,其表现出不同的 温升,即不同程度的线性热膨胀变形驱动仿生楔形触角A、B(8、12)产生相应的等效位移:在 内包络式柔性较链A、B(2、13)外侧开槽内孔的间隙处,一方面,热膨胀变形导致的径向位移 增加了仿生楔形触角A、B(8、12)与柱形转动体(11)外圆柱面微结构阵列间的接触载荷,从 而增强了柱形转动体(11)微转动过程中的表面滑动摩擦力:另一方面,热膨胀变形导致的 周向位移亦直接驱动了柱形转动体(11)产生可控的微角位移。 9.根据权利要求1至4中任意一项所述的基于仿生触角和热膨胀的宏微驱动旋转平台, 其特征在于:所述的柱形转动体(11)的外圆柱表面为非光滑圆柱面,即柱形转动体(11)的 圆柱面表层制备有特征尺寸在百微米级的球状微结构阵列,该微型凸起结构沿柱形转动体 (11)的轴向等间距分布,可增加仿生楔形触角A、B(8、12)与柱形转动体(11)之间的滑动摩 擦系数。 10.根据权利要求1至4中任意一项所述的基于仿生触角和热膨胀的宏微驱动旋转平 台,其特征在于:所述的基于仿生触角和热膨胀的宏微驱动旋转平台的主体尺寸为51mm ×40mm×14mm。 3
CN105720859A 说明书 1/7页 基于仿生触角和热膨胀的宏微驱动旋转平台 技术领域 [0001]本发明涉及精密驱动领域,特别涉及一种具有纳米级驱动精度的基于仿生触角和 热膨胀的宏微驱动旋转平台。通过内包络式压电驱动单元结合具有特征形态的仿生楔形触 角,可实现微弧度级的转动精度。在此基础上,结合楔形触角的可控热膨胀,可实现纳弧度 级转角的精密驱动,即实现压电式旋转平台的宏微耦合驱动模式。本发明可为微纳操作、精 密光学等有微纳米级精密驱动需求的诸多领域提供技术支撑,亦可作为微构件微尺度力学 性能精密测试的加载单元。 背景技术 [0002]传统精密驱动与传动技术往往采用伺服电机、直线电机等驱动部件作为驱动动力 源,以及滚数丝杠、蜗轮蜗杆、线性导轨、曲柄连杆机构等传动部件构成复杂传动系统。由于 存在电机回转机械惯性、电磁扰动、传动效率损耗、机构爬行、传动系统间隙、换向冲击、滑 动磨损等影响精密传动过程的不利因素,传统驱动与传动技术难以实现纳米级精密驱动与 定位的要求。相比于通过电致伸缩、磁致伸缩、记忆合金变形等效应实现的精密驱动技术, 压电驱动技术具有响应频率高和传动柔性化等特点。以压电精密驱动技术为代表的微纳精 密驱动技术在精密光学、控制工程、微电子技术、航空航天、生物医学工程等领域应用广泛, 尤其在航天飞行器空间对接、仿生微型机器人驱动、超精密加工与装配、显微生物医学组织 操作等前沿领域具有难以替代的作用。而精密驱动器作为对目标对象直接定位与操控的执 行器,其驱动性能直接影响其定位精度与操控对象的运动分辨率。 [0003]根据驱动原理及运动形式的不同,压电驱动器可主要分为惯性式和尺蠖型两种。 其中惯性式压电驱动器具有分辨率高、机械结构简单、输出行程大等特点。相比于直线式驱 动器,旋转驱动器具有更复杂的传动结构,受转动单元回转精度等误差因素的影响,其旋转 定位精度取决于径向和周向的绝对位移。基于粘滑摩擦驱动原理的旋转惯性式压电驱动器 结构紧凑、操作与控制过程简单、定位精度高。其基本结构由压电器件、柔性传动机构和粘 滑回转移动块组成,其中柔性传动机构的移动端与粘滑回转移动块保持面接触或点接触, 接触区域表面具有较大的静摩擦系数和滑动摩擦系数。依据动量守恒定律,当向压电器件 施加线性增加的驱动电压时,柔性传动机构产生相应的驱动位移并与粘滑回转移动块进行 接触摩擦传动,因粘滑过程速度较为缓慢,回转移动快所受惯性冲击并不显著,粘滑移回转 移动块的转动弧长与柔性传动机构的输出位移行程保持一致。当施加在压电器件上的电压 迅速下降时,柔性传动机构迅速弹性回复至其初始位置,但粘滑移回转移动块由于自身的 惯性载荷大于柔性传动结构弹性回复过程中的摩擦力。据此,在周期性锯齿形电压的作用 下,粘滑移回转移动块产生步进旋转位移。J.M.Breguet.对粘滑式惯性驱动器的驱动原理 和控制方法进行了系统的研究,Q.Z.Z©u利用惯性质量块与驱动单元之间的粘滑现象开发 了精密旋转驱动器。采用锯齿波形信号作为均布式压电双晶片的加载电压波形,在加载过 程中周向分布的三个雅典敬佩同时同向缓慢旋转,进而驱动回转驱动单元同步转动:在卸 载过程中,压电晶片迅速弹性回复,而回转驱动单元的位置基本保持不变。因此,在连续锯
CN105720859A 说明书 2/7页 齿波形时序信号的作用下,回转驱动单元实现了连续的旋转运动,旋转速度达到0.18rd/ s.Y.Zhangi研制了一种基于直线运动和旋转运动的多自由度粘滑驱动器,其旋转运动的 实现是基于对两个压电叠堆精确的时序控制配合实现的。 [0004]尽管基于粘滑摩擦驱动原理的旋转惯性式压电驱动器因其简单的结构、较高的运 动分辨率、较大的运动行程和较快的驱动速度而在精密驱动领域应用广泛,但机构磨损、惯 性冲击等因素限制了其极高定位精度的实现。此外,在实际工况下,由于压电精密驱动器的 服役工况往往受到空间尺寸狭小、电磁环境复杂、工作温度剧变等诸多因素的影响,难以实 现纳米级精度的稳定运动输出。 发明内容 [0005]本发明的目的在于提供一种基于仿生触角和热膨胀的宏微驱动旋转平台,解决了 现有技术存在的上述问题。针对现有粘滑摩擦型惯性式驱动器驱动大都仅采用压电器件作 为驱动单元的驱动模式,本发明将压电驱动方法实现的宏观驱动与柔性机构热膨胀行为实 现的微观驱动相结合,实现丰富的旋转驱动模式和纳米级的旋转驱动分辨率。本发明由宏 观压电驱动单元、微观热膨胀驱动单元、微回转单元以及支撑单元组成。本发明的宏观旋转 运动依靠内包络式柔性铰链和仿生楔形触角的弹性变形实现柱形转动体的粘滑摩擦,本发 明的微观旋转驱动依靠高温陶瓷加热棒在仿生楔形触角的间歇处产生的热膨胀实现柱形 转动体的微动摩擦。 [0006]本发明的上述目的通过以下技术方案实现: 基于仿生触角和热膨胀的宏微驱动旋转平台,包括宏观压电驱动单元、微观热膨胀驱 动单元、微回转单元以及支撑单元,所述宏观压电驱动单元嵌入式刚性安装在支撑单元中 的基座7的矩形槽中,内包络式柔性较链A2、内包络式柔性铰链B13对称轴线的非固定部分 通过支撑单元中的硬质钢球6浮动于基座7的弧形导向槽上:微观热膨胀驱动单元中的高温 陶瓷加热棒1过盈安装于宏观压电驱动单元中对称式布局的内包络式柔性铰链A2、内包络 式柔性铰链B13外侧的开槽内孔中:微回转单元中的柱形转动体11的圆柱母线与微观热膨 胀驱动单元中的仿生楔形触角A8、仿生楔形触角B12的触点保持线弹性接触,且陶瓷球轴承 9的外圈过盈安装于支撑单元中的基座7的中心阶梯内孔中。 [0007] 所述的宏观压电驱动单元包括内包络式柔性铰链A2、内包络式柔性铰链B13、内六 角螺钉3、铰链刚性支撑端4和压电促动器5,所述内包络式柔性铰链A2、内包络式柔性铰链 B13具有近圆环形拓扑结构,且分别具有八处圆弧过渡式的柔性结构,铰链刚性支撑端4通 过内六角螺钉3与基座7连接,一组压电促动器5具有输出位移自检测功能并同轴、共面、对 称安装于内包络式柔性铰链A2、内包络式柔性铰链B13的刚性内侧壁之间,其对称轴为柱形 转动体11的中轴线。 [0008] 所述的微观热膨胀驱动单元包括一组高温陶瓷加热棒1和仿生楔形触角A8、仿生 楔形触角B12,所述高温陶瓷加热棒1以柱形转动体11的中轴线为对称轴安装在内包络式柔 性铰链A2、内包络式柔性铰链B13外侧的开槽内孔中,仿生楔形触角A8、仿生楔形触角B12具 有弧形“月牙式”的阵列微结构,且附着在内包络式柔性铰链A2、内包络式柔性铰链B13外侧 的开槽圆柱外表面。 [0009]所述的微回转单元包括陶瓷球轴承9、刚性平面反光板10和柱形转动体11,所述柱 5