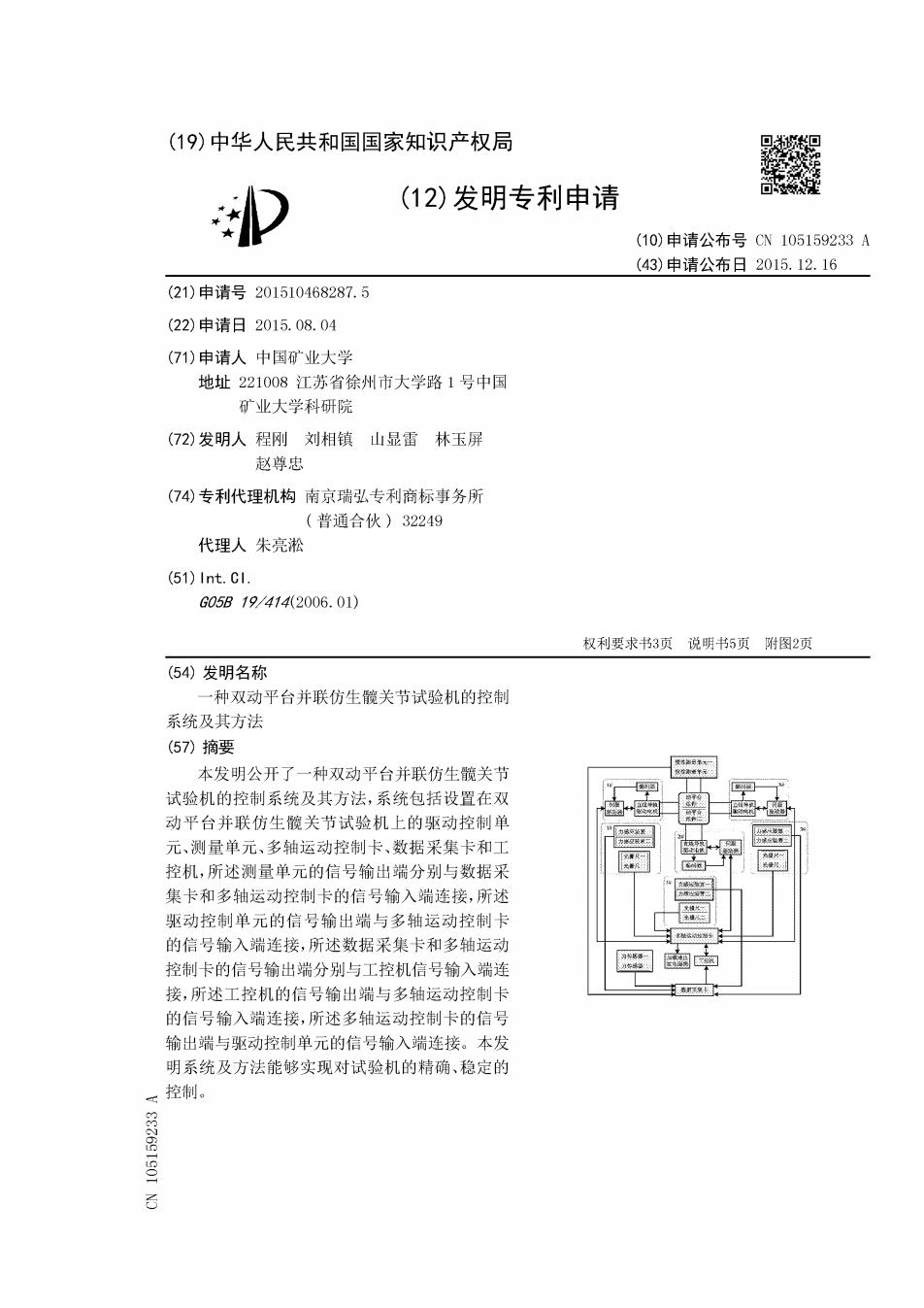
(19)中华人民共和国国家知识产权局 ▣张▣ (12)发明专利申请 (10)申请公布号CN105159233A (43)申请公布日2015.12.16 (21)申请号201510468287.5 (22)申请日2015.08.04 (71)申请人中国矿业大学 地址221008江苏省徐州市大学路1号中国 矿业大学科研院 (72)发明人程刚刘相镇山显雷林玉屏 赵尊忠 (74)专利代理机构南京瑞弘专利商标事务所 (普通合伙)32249 代理人朱亮淞 (51)1nt.Cl. G05B19/4142006.01) 权利要求书3页说明书5页附图2页 (54)发明名称 一种双动平台并联仿生髋关节试验机的控制 系统及其方法 (57)摘要 本发明公开了一种双动平台并联仿生髋关节 试验机的控制系统及其方法,系统包括设置在双 动平台并联仿生髋关节试验机上的驱动控制单 元、测量单元、多轴运动控制卡、数据采集卡和工 控机,所述测量单元的信号输出端分别与数据采 集卡和多轴运动控制卡的信号输入端连接,所述 驱动控制单元的信号输出端与多轴运动控制卡 的信号输入端连接,所述数据采集卡和多轴运动 控制卡的信号输出端分别与工控机信号输入端连 接,所述工控机的信号输出端与多轴运动控制卡 的信号输入端连接,所述多轴运动控制卡的信号 输出端与驱动控制单元的信号输入端连接。本发 明系统及方法能够实现对试验机的精确、稳定的 一控制。 S93697901
CN105159233A 权利要求书 1/3页 1.一种双动平台并联仿生髋关节试验机的控制系统,其特征在于:包括设置在双动平 台并联仿生髋关节试验机上的驱动控制单元、测量单元、多轴运动控制卡、数据采集卡和工 控机,所述测量单元的信号输出端分别与数据采集卡和多轴运动控制卡的信号输入端连 接,所述驱动控制单元的信号输出端与多轴运动控制卡的信号输入端连接,所述数据采集 卡和多轴运动控制卡的信号输出端分别与工控机信号输入端连接,所述工控机的信号输出 端与多轴运动控制卡的信号输入端连接,所述多轴运动控制卡的信号输出端与驱动控制单 元的信号输入端连接。 2.根据权利要求1所述一种双动平台并联仿生髋关节试验机的控制系统,其特征在 于:所述双动平台并联仿生髋关节试验机包括支撑框架、液压加载系统、力传感器一(23)、 力传感器二(13)、滚珠花键轴(18)、滚珠花键轴套(17)、动平台组件一(22)、动平台组件二 (10)和三个直线导轨(2),所述支撑框架包括上支撑板(1)、外围支柱(3)、中间支撑板(16) 和底面基座(9)构成的支撑体系,所述液压加载系统包括液压缸(25)和导向套(24),所述 液压缸(25)固定在上支撑板(1)上并通过固定在上支撑板(1)上的导向套(24)与位于上 支撑板(1)下方的力传感器一(23)的上端连接,所述力传感器一(23)的下端与动平台组 件一(22)的人工髋关节连接,所述动平台组件一(22)的下端球面与球面基座一(21)的上 端接触连接,所述球面基座一(21)的下端与中间支柱一(20)上端固定连接: 所述滚珠花键轴套(17)固定在中间支撑板(16)上,所述滚珠花键轴(18)设置在滚 珠花键轴套(17)内,所述中间支柱一(20)的下端与滚珠花键轴(18)的上端连接,所述滚 珠花键轴(18)的下端与中间支柱二(14)的上端连接,所述中间支柱(14)的下端与力传感 器二(13)的上端连接,所述力传感器二(13)的下端与动平台组件二(10)的人工髋关节连 接,动平台组件二(10)的下端球面与球面基座二(12)的上端接触连接,所述球面基座二 (12)的下端与中间支柱三(11)上端固定连接,所述中间支柱三(11)下端与地面基座(9) 固定连接; 三个直线导轨(2)竖直设置在地面基座(9)上,每个直线导轨(2)上分别上、下设置第 一滑块(30)和第二滑块(33),所述每个直线导轨(2)上的第一滑块(30)与动平台组件一 (22)通过连杆铰接,所述每个直线导轨(2)上的第二滑块(33)与动平台组件二(10)通过 连杆铰接。 3.根据权利要求2所述一种双动平台并联仿生髋关节试验机的控制系统,其特征在 于:所述每个直线导轨(2)包括两个导程相同、螺旋方向相反的上丝杆(29)和下丝杆(32) 连接而成,所述上丝杆(29)上设置有第一滑块(30),所述下丝杆(32)上设置有第二滑块 (33)。 4.根据权利要求2所述一种双动平台并联仿生髋关节试验机的控制系统,其特征在 于:所述驱动控制单元分为三组分别对应一个直线导轨(2),每组驱动控制单元结构相同, 分别包括编码器、伺服驱动器和对应的直线导轨的驱动电机,所述伺服驱动器的信号输入 端与多轴运动控制卡的信号输出端连接,所述伺服驱动器的信号输出端与对应的直线导轨 的驱动电机的信号输入端连接,所述对应的直线导轨的驱动电机的信号输出端分别与编码 器和伺服驱动器的信号输入端连接,所述编码器的信号输出端与伺服驱动器的信号输入端 连接。 5.根据权利要求4所述一种双动平台并联仿生髋关节试验机的控制系统,其特征在 2
CN105159233A 权利要求书 2/3页 于:所述测量单元分为三组分别对应一个直线导轨(2),每组测量单元结构相同,分别包括 力感应装置一·、力感应装置二、光栅尺一和光栅尺二,所述力感应装置一安装在第一滑块 (30)与动平台组件一(22)之间的连杆(4)上,所述力感应装置二安装在第二滑块(33)与 动平台组件二(10)之间的连杆(4)上,所述光栅尺一安装在第一滑块(30)上,所述光栅尺 二安装在第二滑块(33)上:所述力感应装置一和力感应装置二的信号输出端分别与数据 采集卡的信号输入端连接,所述光栅尺一和光栅尺二的信号输出端分别与多轴运动控制卡 的信号输入端连接。 6.根据权利要求5所述一种双动平台并联仿生髋关节试验机的控制系统,其特征在 于:包括惯性测量单元一和惯性测量单元二,所述惯性测量单元一和惯性测量单元二分别 固定在动平台组件一(22)和动平台组件二(10)上,所述惯性测量单元一和惯性测量单元 二的信号输出端分别与数据采集卡的信号输入端连接。 7.根据权利要求6所述一种双动平台并联仿生髋关节试验机的控制系统,其特征在 于:所述力传感器一(23)和力传感器二(13)的信号输出端与数据采集卡信号输入端连接, 所述加载液压缸电磁阀的信号输入端多与轴运动控制卡的信号输出端连接。 8.一种双动平台并联仿生髋关节试验机的控制系统的控制方法,其特征在于,包括以 下步骤: 1)双动平台并联仿生髋关节试验机开始工作时,驱动控制单元控制直线导轨(2)进行 运动,所述测量单元、加载力传感器、惯性测量单元一、惯性测量单元二和编码器对试验机 进行数据测取:由加载力传感器测得的液压缸加载力数据信号,惯性测量单元一和惯性测 量单元二测得动平台组件一(22)和动平台组件二(10)的姿态信号,力感应装置一和力感 应装置二测得直线导轨分别与动平台组件一(22)和动平台组件二(10)之间的感应力数据 信号,均通过数据采集卡传输到工控机上:由光栅尺一和光栅尺二测得第一滑块(30)和第 二滑块(33)的位置数据信号通过多轴运动控制卡传输到工控机上;由编码器测得直线导 轨的驱动电机的数据信号通过同服驱动器由多轴运动控制卡传递到工控机上; 2)工控机中的上位软件可完成人机交互功能,同时通过对力感应装置一和力感应装置 二测得的感应力数据信号,以及力传感器一(23)和力传感器二(13)测得的液压缸(25)加 载力数据信号进行计算分析,完成双动平台并联仿生髋关节试验机的力学计算,获得控制 指令,并将控制指令传输至多轴运动控制卡: 3)工控机中的上位软件通过对惯性测量单元一和惯性测量单元二测得动平台组件一 (22)和动平台组件二(10)的姿态信号,以及光栅尺一和光栅尺二测得的位置信号进行误 差分析,分析出误差值,选取误差值中最大值作为双动平台并联仿生髋关节试验机的补偿 误差,并完成双动平台并联仿生髋关节试验机的运动学计算和控制系统的解算,获得控制 指令,并将控制指令传输至多轴运动控制卡: 4)多轴运动控制卡对控制指令进行处理,并将处理后的控制指令传输到伺服驱动器和 加载液压缸电磁阀上。 5)伺服驱动器将接收到的控制指令转化成电信号发送到直线导轨的驱动电机,以实现 实时协调控制三个直线导轨(2)运动,使三个直线导轨(2)上的第一滑块(30)和第二滑块 (33)按照运动规律进行运动,进而实现双动平台并联仿生髋关节试验机的动平台按照预设 轨迹运动:加载液压缸电磁阀控制液压缸(25)按一定的规律输出加载力。 3
CN105159233A 权利要求书 3/3页 6)双动平台并联仿生髋关节试验机完成一周期运动后,试验机立即停止,并回到初始 位置,准备下一周期运动
CN105159233A 说明书 1/5页 一种双动平台并联仿生髋关节试验机的控制系统及其方法 技术领域 [0001]本发明专利设计一种髋关节试验机的控制系统及方法,特别是涉及一种双动平台 髋关节试验机的控制系统及方法。 背景技术 [0002] 随着人类社会步入高龄化阶段,各种与高龄有关的关节疾病将会大量发生,因此 对人工关节的需求也会日益增多。因此,积极开展对人工关节的生物摩擦学特性研究,对提 高人工关节的使用质量、临床使用寿命具有重大意义。 [0003] 由于双动平台髋关节试验机需要对两个人工髋关节同步进行复杂的运动,同时还 要满足动态加载的要求,因此,设计出合适的控制系统,使试验机可以精确地实现多种轨迹 下的运动和动态加载,具有重要的意义。 发明内容 [0004]发明目的:为了克服现有技术中存在的不足,本发明提供一种双动平台并联仿生 髋关节试验机的控制系统及其方法,能够实现对试验机的精确、稳定的控制。 [0005] 技术方案:为实现上述目的,本发明采用的技术方案为: [0006]一种双动平台并联仿生髋关节试验机的控制系统,包括设置在双动平台并联仿生 髋关节试验机上的驱动控制单元、测量单元、多轴运动控制卡、数据采集卡和工控机,所述 测量单元的信号输出端分别与数据采集卡和多轴运动控制卡的信号输入端连接,所述驱动 控制单元的信号输出端与多轴运动控制卡的信号输入端连接,所述数据采集卡和多轴运动 控制卡的信号输出端分别与工控机信号输入端连接,所述工控机的信号输出端与多轴运动 控制卡的信号输入端连接,所述多轴运动控制卡的信号输出端与驱动控制单元的信号输入 端连接。 [0007]进一步的,所述双动平台并联仿生髋关节试验机包括支撑框架、液压加载系统、力 传感器一、力传感器二、滚珠花键轴、滚珠花键轴套、动平台组件一、动平台组件二和三个直 线导轨,所述支撑框架包括上支撑板、外围支柱、中间支撑板和底面基座构成的支撑体系, 所述液压加载系统包括液压缸和导向套,所述液压缸固定在上支撑板上并通过固定在上支 撑板上的导向套与位于上支撑板下方的力传感器一的上端连接,所述力传感器一的下端与 动平台组件一的人工髋关节连接,所述动平台组件一的下端球面与球面基座一的上端接触 连接,所述球面基座一的下端与中间支柱一上端固定连接:所述滚珠花键轴套固定在中间 支撑板上,所述滚珠花键轴设置在滚珠花键轴套内,所述中间支柱一的下端与滚珠花键轴 的上端连接,所述滚珠花键轴的下端与中间支柱二的上端连接,所述中间支柱的下端与力 传感器二的上端连接,所述力传感器二的下端与动平台组件二的人工髋关节连接,动平台 组件二的下端球面与球面基座二的上端接触连接,所述球面基座二的下端与中间支柱三上 端固定连接,所述中间支柱三下端与地面基座固定连接;三个直线导轨竖直设置在地面基 座上,每个直线导轨上分别上、下设置第一滑块和第二滑块,所述每个直线导轨上的第一滑 5