
y0] 德创机器人 3.羽毛球机器人嵌入式控制系统设计 Dechuang Robot 羽毛球机器人嵌入式控制系统:KEL开发平台 工程创建 程序下载 环境配置 KEL是一种嵌入式软件开发平台, 集工程创建、环境配置、程序编译、 在线仿真与程序下载等功能于一体。 KEIL开 发平台 库文件 在线仿真 装载 程序编译 17
3.羽毛球机器人嵌入式控制系统设计 17 羽毛球机器人嵌入式控制系统:KEIL开发平台 KEIL是一种嵌入式软件开发平台, 集工程创建、环境配置、程序编译、 在线仿真与程序下载等功能于一体。 KEIL开 发平台 工程创建 环境配置 库文件 装载 程序编译 在线仿真 程序下载

德仓创机器人 3.羽毛球机器人嵌入式控制系统设计 Dechuang Robot 羽毛球机器人嵌入式控制系统:任务调度 底盘任务 任务间的同步与切换通过 PID 二维平 信号量(Semaphore/Mutex) 台任务 实现 任务 计算 创建 定时器 底盘位 任务 任务 中斯 置读取 任务 延时 任务 挂起 调度 运动控 电机 蜂鸣器 制软件 动最心 任务 洗检测 任务 任务 任务 优先级 结束 击球 任务 任务 电池电 量检测 串口发 任务 送任务 18
3.羽毛球机器人嵌入式控制系统设计 18 羽毛球机器人嵌入式控制系统:任务调度 运动控 制软件 底盘任务 二维平 台任务 底盘位 置读取 任务 电机驱 动器心 跳检测 任务 击球 任务 串口发 送任务 电池电 量检测 任务 机器人 暂停 任务 蜂鸣器 任务 定时器 中断 PID 计算 任务 调度 任务 创建 任务 挂起 任务 结束 任务 优先级 任务 延时 任务间的同步与切换通过 信号量(Semaphore/Mutex) 实现
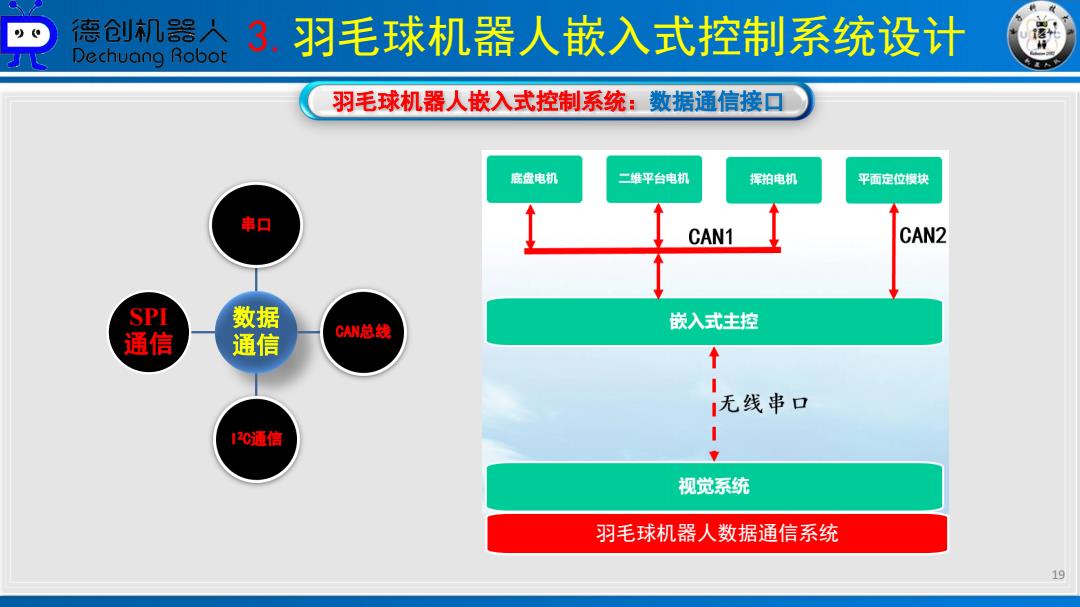
德仓创机器人 3.羽毛球机器人嵌入式控制系统设计 Dechuang Robot 羽毛球机器人嵌入式控制系统:数据通信接口 底盘电机 二维平台电机 挥拍电机 平面定位模块 串口 CAN1 CAN2 SPI 数据 嵌入式注控 通信 通信 C州总线 ↑ 无线串口 126通信 视觉系统 羽毛球机器人数据通信系统 19
3.羽毛球机器人嵌入式控制系统设计 19 羽毛球机器人嵌入式控制系统:数据通信接口 数据 通信 串口 CAN总线 I 2C通信 SPI 通信 羽毛球机器人数据通信系统
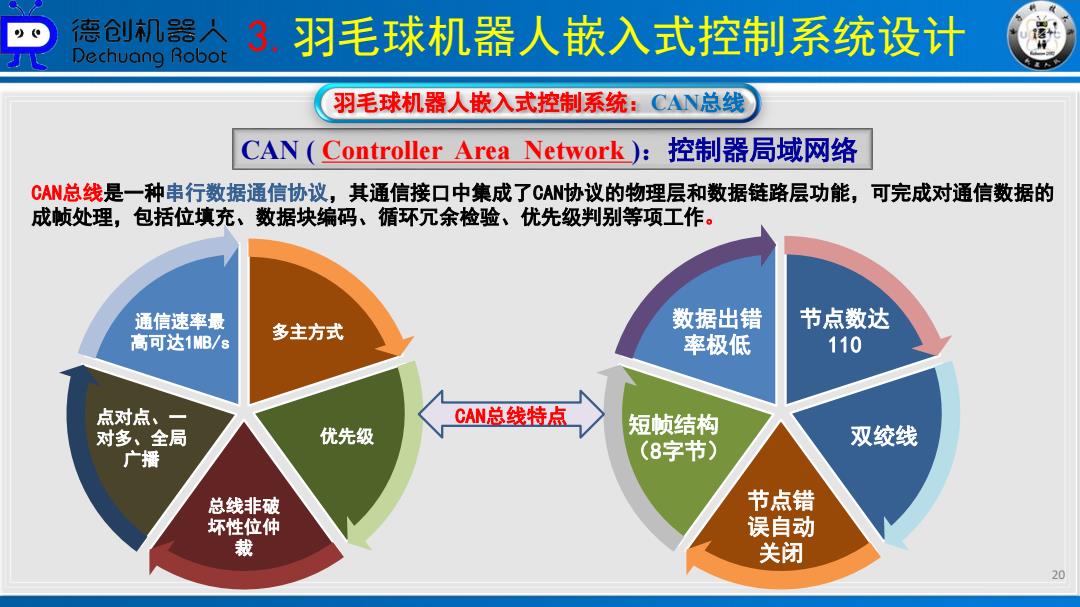
德仓创机器人 3.羽毛球机器人嵌入式控制系统设计 Dechuang Robot 羽毛球机器人嵌入式控制系统:CAN总线 CAN(Controller Area Network):控制器局域网络 CN总线是一种串行数据通信协议,其通信接口中集成了CN协议的物理层和数据链路层功能,可完成对通信数据的 成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。 通信速率最 多主方式 数据出错 节点数达 高可达1MB/6 率极低 110 点对点、一 CAN总线特点 对多、全局 优先级 短帧结构 广播 (8字节) 双绞线 总线非破 节点错 坏性位仲 误自动 裁 关闭 20
3.羽毛球机器人嵌入式控制系统设计 20 羽毛球机器人嵌入式控制系统:CAN总线 CAN ( Controller Area Network ):控制器局域网络 CAN总线是一种串行数据通信协议,其通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的 成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。 多主方式 优先级 总线非破 坏性位仲 裁 点对点、一 对多、全局 广播 通信速率最 高可达1MB/s 节点数达 110 双绞线 节点错 误自动 关闭 短帧结构 (8字节) 数据出错 率极低 CAN总线特点
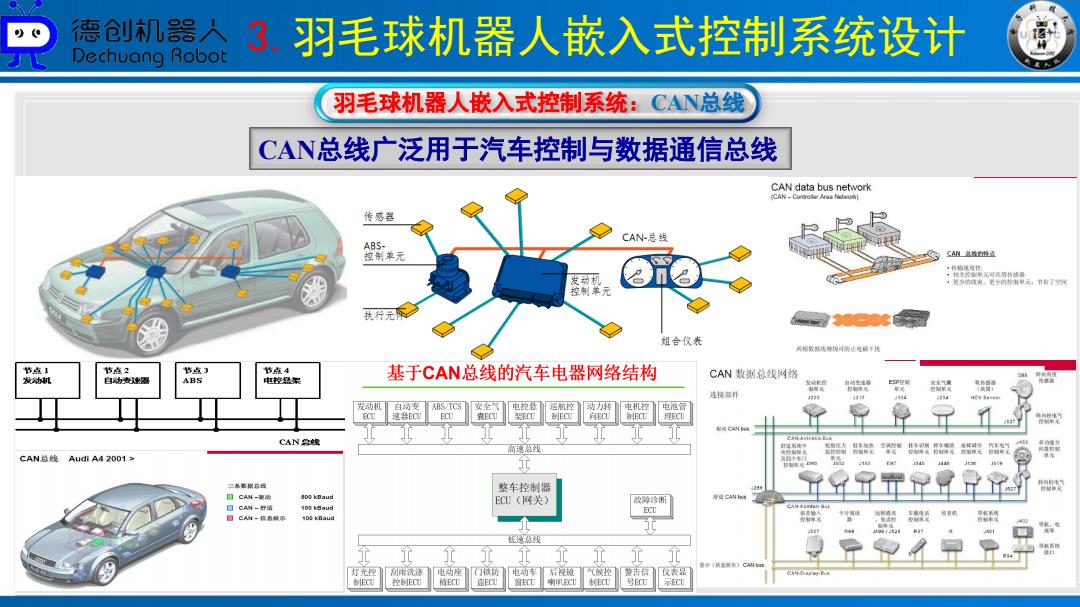
德仓创机器人 3.羽毛球机器人嵌入式控制系统设计 Dechuang Robot 羽毛球机器人嵌入式控制系统:CAN总线 CAN总线广泛用于汽车控制与数据通信总线 CAN data bus network CAN-Conya ol Rr Mole 传感器 CAN-总线 ABS- 控制单元 CA包线直 执行元 组合仪表 榨数服线时境可两止电储千传 15点1 节点2 15点3 节点4 CAN数括总线树路 发动机 自动业墨 基于CAN总线的汽车电器网络结构 ABS 电整B架 连棱部件 472 2934 电 理ECU 制CAN DS CAN约线 高速总 CAN总线Audi A42001≥ 4h5 三条点 整车控制器 口CAM一事南 sD是kDoud ECU(网关) 故障修断 每适C城a ECU 口CAM一病直领示 100 kDaud CA 灯死 初蔬电动座门碳防电动车后视硬气候控誓告信表显 制EU 控拒
3.羽毛球机器人嵌入式控制系统设计 21 羽毛球机器人嵌入式控制系统:CAN总线 CAN总线广泛用于汽车控制与数据通信总线