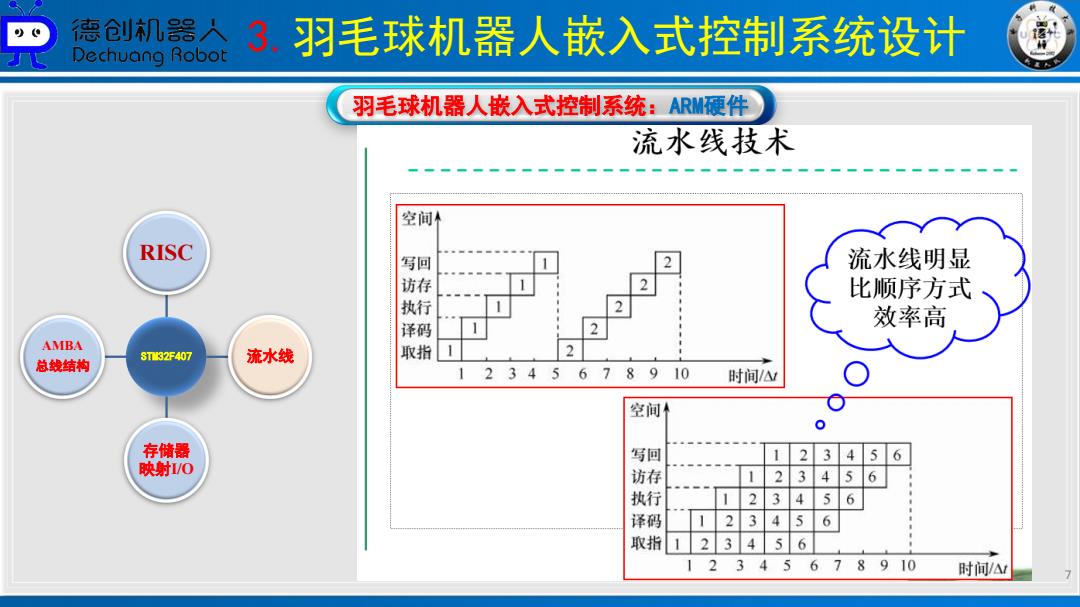
德仓创机器人 3.羽毛球机器人嵌入式控制系统设计 Dechuang Robot 羽毛球机器人嵌入式控制系统:ARM硬件 流水线技术 空间 RISC 流水线明显 访存 比顺序方式 执行 译码 效率高 AMBA 总线结构 sn32F407 流水线 取指 34567 8 9 10 时间/△M 空间个 存储器 写回 映射VO 访存 执行 译码 6 取指 6 2 345 6 78910 时间/△M
3.羽毛球机器人嵌入式控制系统设计 羽毛球机器人嵌入式控制系统:ARM硬件 STM32F407 RISC 流水线 存储器 映射I/O AMBA 总线结构 7
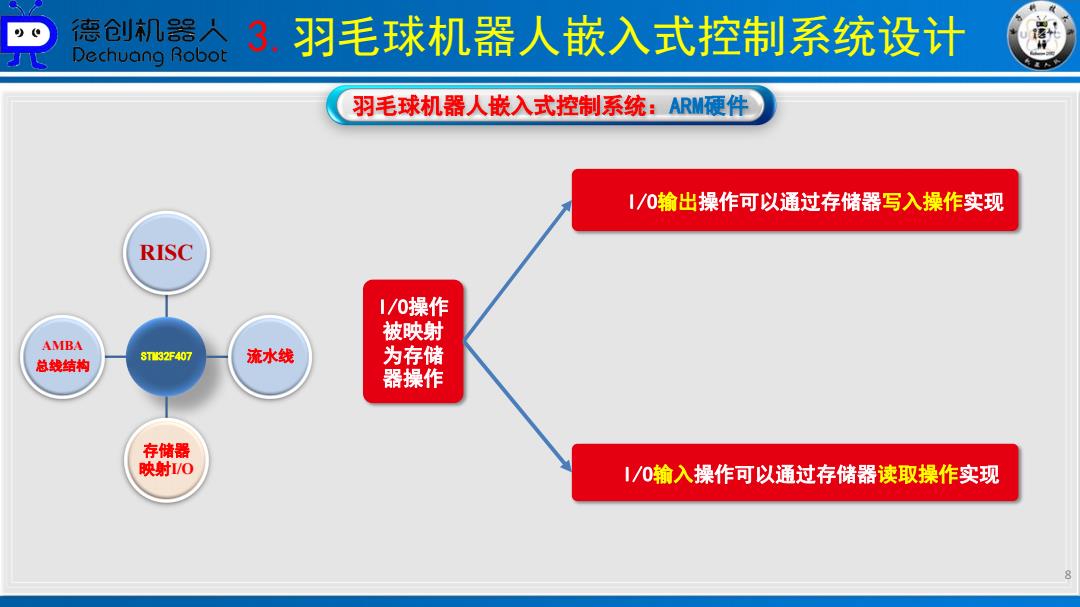
德仓创机器人 3.羽毛球机器人嵌入式控制系统设计 Dechuang Robot 羽毛球机器人嵌入式控制系统:ARM硬件 1/0输出操作可以通过存储器写入操作实现 RISC 1/0操作 被映射 AMBA 总线结构 sn32F407 流水线 为存储 器操作 存储器 映射IVO I/0输入操作可以通过存储器读取操作实现
3.羽毛球机器人嵌入式控制系统设计 羽毛球机器人嵌入式控制系统:ARM硬件 STM32F407 RISC 流水线 存储器 映射I/O AMBA 总线结构 8 I/O操作 被映射 为存储 器操作 I/O输出操作可以通过存储器写入操作实现 I/O输入操作可以通过存储器读取操作实现
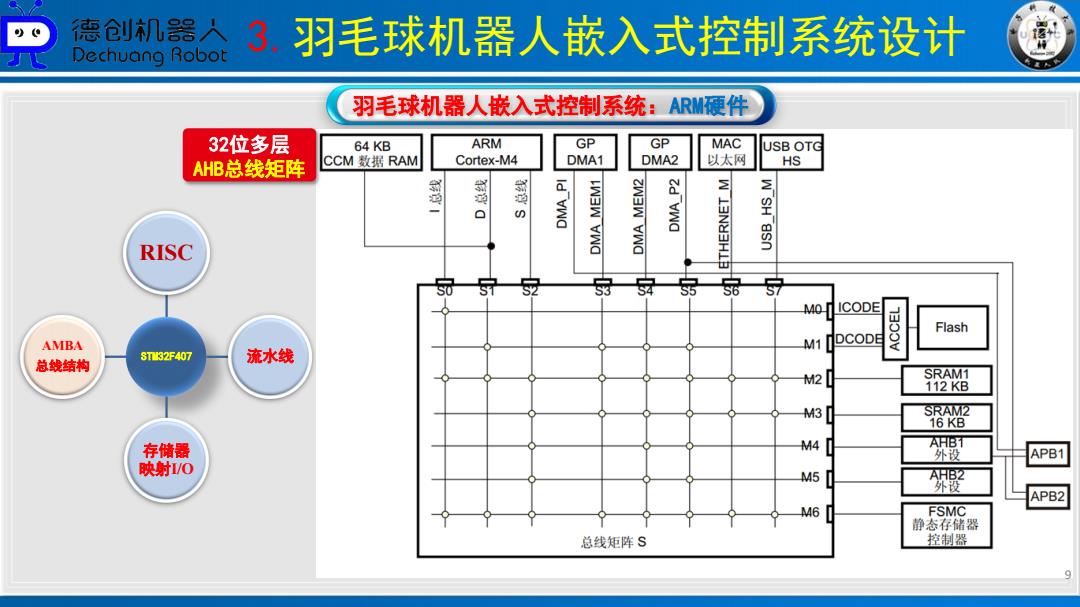
德仓创机器人 3.羽毛球机器人嵌入式控制系统设计 Dechuang Robot 羽毛球机器人嵌入式控制系统:ARM硬件 32位多层 64KB ARM GP GP MAC JSB OTG AHB总线矩阵 CCM数据RAM Cortex-M4 DMA1 DMA2 以太网 HS 到 8 乏 VWO 坐 RISC 5品 57 ICODE Flash AMBA M1 DCODE 总线结构 sn32F407 流水线 M2 SRAM1 112KB M3[ SRAM2 16 KB 存储器 M4 AHB1 外设 APB1 映射1V0 M5 厂 竖 APB2 M6 FSMC 静态存储器 总线矩阵S 控制器 9
3.羽毛球机器人嵌入式控制系统设计 羽毛球机器人嵌入式控制系统:ARM硬件 STM32F407 RISC 流水线 存储器 映射I/O AMBA 总线结构 9 32位多层 AHB总线矩阵

德仓创机器人 3.羽毛球机器人嵌入式控制系统设计 Dechuang Robot 羽毛球机器人嵌入式控制系统:ARM核心资源 定时器 运动控制 软件 GPIO STM32F407 FREERTOS 操作系统 串口 时钟 CAN 总线 10
3.羽毛球机器人嵌入式控制系统设计 10 羽毛球机器人嵌入式控制系统:ARM核心资源 STM32F407 定时器 GPIO 串口 CAN 总线 时钟 FREERTOS 操作系统 运动控制 软件
德创机器人 3.羽毛球机器人嵌入式控制系统设计 Dechuang Robot 羽毛球机器人嵌入式控制系统:ARM控制模块设计 11
3.羽毛球机器人嵌入式控制系统设计 11 羽毛球机器人嵌入式控制系统:ARM控制模块设计