德仓创机器人 Dechuang Robot 2.羽毛球机器人结构:设计工具 草图设计案例:榔头草绘图 特证草题评估Dimkpert SOLIDW0RS柜件SOLIDWORKS MBD PEm熬指·0·◆·是·里 目倪⊕ 7 ③零件2认<<队是示状态1) 同History 基准面 团传器 日注据 气材质<未指定 、前视基生西 转换实 议上现年西 体引用 辅助线 、左怪型 草图 原点 设计 C月草图1 申基准塑1 巾基座要2 几何 口草禹2 阵列 的禁性西3 约束 草图3
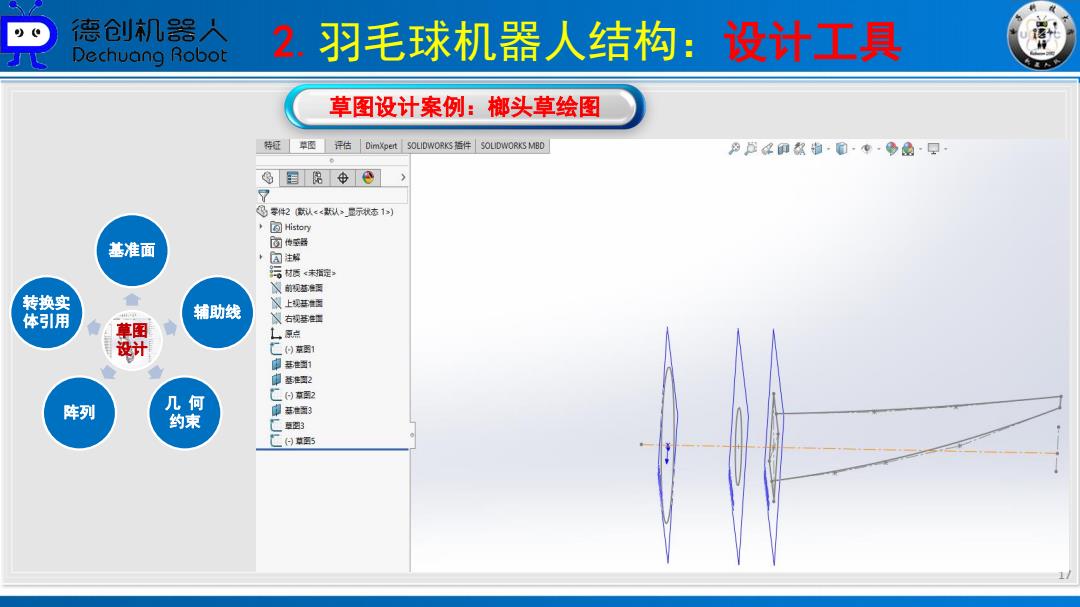
2.羽毛球机器人结构:设计工具 17 草图设计案例:榔头草绘图 草图 设计 基准面 辅助线 几 何 约束 阵列 转换实 体引用 实体转 成草图
德仓创机器人 Dechuang Robot 2.羽毛球机器人结构:设计工具 Dn年t5Dw0a件aDw9s@ 零件设计案例:拉伸特征 Ge蔬⊕ ↑马零件4认-是- D0金酸# 拉伸将2维草图截面沿着特定方向延伸或切除三维实体。 从 方内 拉伸形成2维导轨 拉伸 2 基体、薄 口方牌湖 口电骑征m 壁、切除 旋转 所2城型 标准件 ◇面笔行 就 基体、曲 面、切除 辅助 扫描 列(线性 翻 基体、曲 面、切除 附 倒角、圆 放样 角 抽亮、筋 基体切除 18
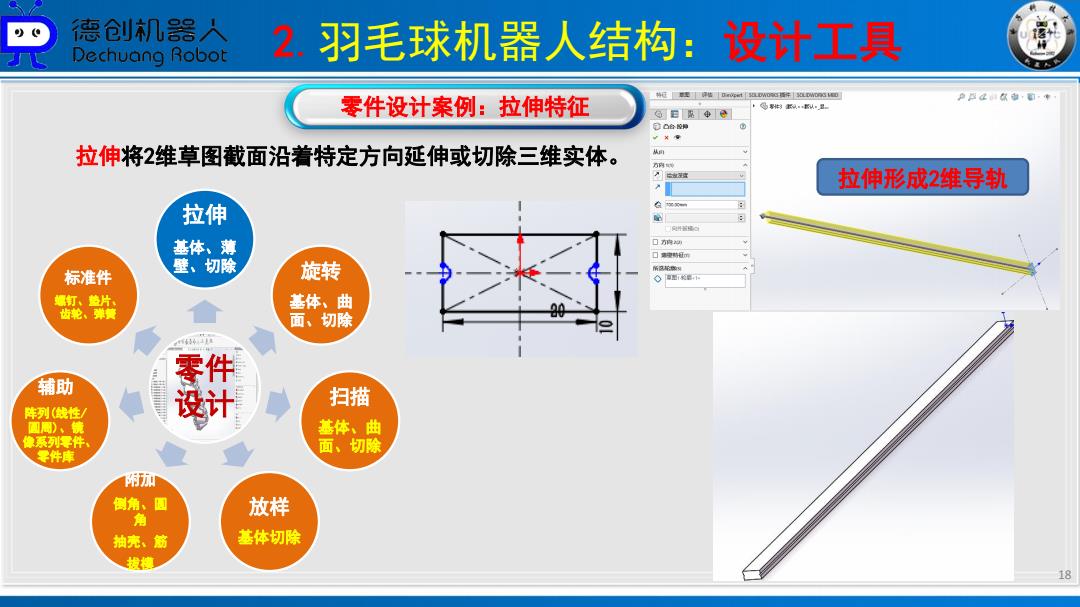
2.羽毛球机器人结构:设计工具 18 零件设计案例:拉伸特征 零件 设计 拉伸 基体、薄 壁、切除 旋转 基体、曲 面、切除 扫描 基体、曲 面、切除 放样 基体切除 附加 倒角、圆 角 抽壳、筋 拔模 辅助 阵列(线性/ 圆周)、镜 像系列零件、 零件库 标准件 螺钉、垫片、 齿轮、弹簧 拉伸将2维草图截面沿着特定方向延伸或切除三维实体。 拉伸形成2维导轨
99 德仓创机器人 Dechuang Robot 2.羽毛球机器人结构:设计工具 零件设计案例:旋转特征 特延草评估DimXpert So1 DWORKS件SOLIDWORK5M6o ,岛零件料队s队~显 目限⊕色 参旋转 旋转将2维草图实体绕着轴线旋转形成或切除三维实体。 旋转形成麦充纳姆小轮 转A 拉伸 方向伸 给定元度 0国%⊕⊙ 筐360002 基体、薄 号零科以款人,是状益1) 口方向20 壁、切除 旋转 口需壁符征m 标准件 所法轮 号材辆束指说 就 基体、曲 汉新视想正 面、切除 上 L 辅助 扫描 列(线性 酬 基体、曲 面、切除 附 倒角、圆 放样 角 抽亮、筋 基体切除 19
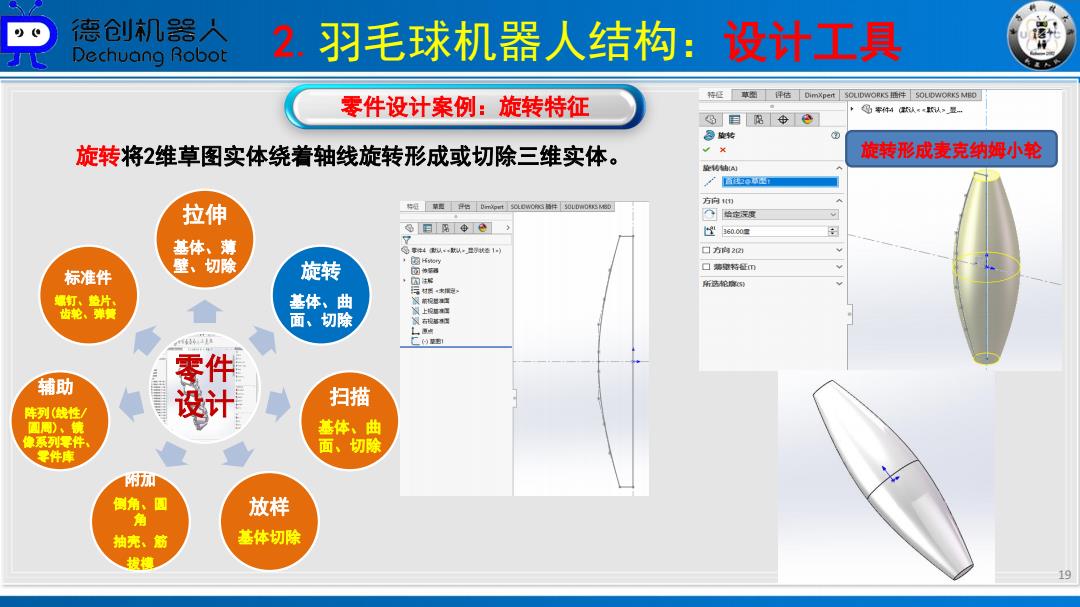
2.羽毛球机器人结构:设计工具 19 零件设计案例:旋转特征 零件 设计 拉伸 基体、薄 壁、切除 旋转 基体、曲 面、切除 扫描 基体、曲 面、切除 放样 基体切除 附加 倒角、圆 角 抽壳、筋 拔模 辅助 阵列(线性/ 圆周)、镜 像系列零件、 零件库 标准件 螺钉、垫片、 齿轮、弹簧 旋转将2维草图实体绕着轴线旋转形成或切除三维实体。 旋转形成麦克纳姆小轮
德仓创机器人 Dechuang Robot 2.羽毛球机器人结构:设计工具 零件设计案例:扫描特征 扫描将2维草图实体沿着曲线扫描形成或切除三维实体。 扫描成型 特位草牌估Dm0休30Uwcs时LONORS MD 是《物·国 零件7认队是 拉伸 回图⊕ P扫指 基体、薄 轮烧刺和露轻 标准件 壁、切除 旋转 。草轮 ○形轮原9 基体、曲 0草7 就 C 面、切除 引导口 项a 始处体来处国DT 28处相英型约 辅助 酬 格经相切 扫描 结来处旧加线型 盛径切 列(线性 基体、曲 口落空特征州 面、切除 曲率园示 附 倒角、圆 放样 角 抽亮、筋 基体切除 20
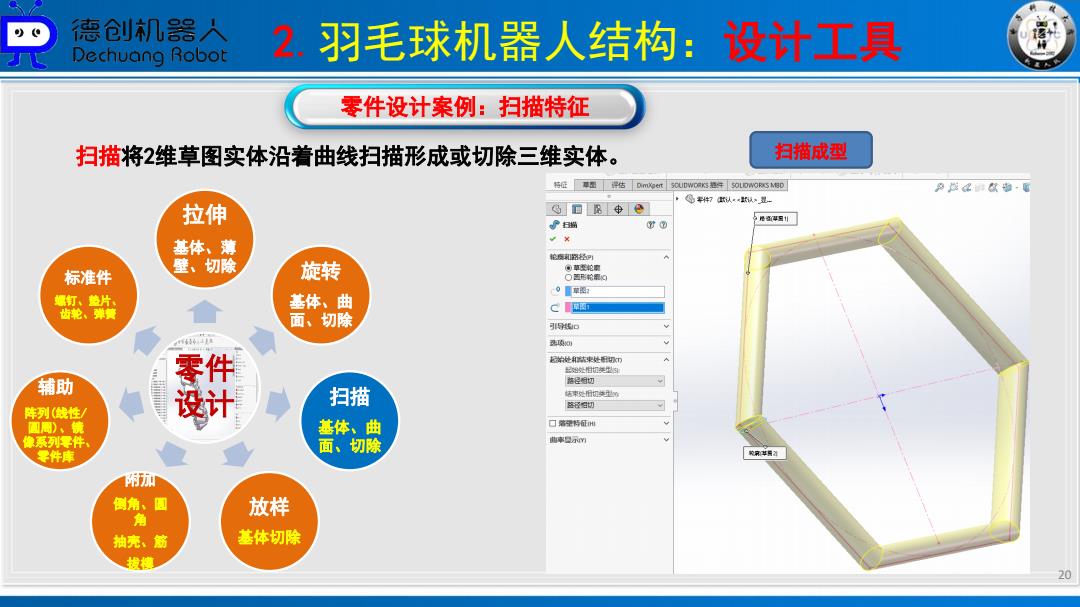
2.羽毛球机器人结构:设计工具 20 零件设计案例:扫描特征 零件 设计 拉伸 基体、薄 壁、切除 旋转 基体、曲 面、切除 扫描 基体、曲 面、切除 放样 基体切除 附加 倒角、圆 角 抽壳、筋 拔模 辅助 阵列(线性/ 圆周)、镜 像系列零件、 零件库 标准件 螺钉、垫片、 齿轮、弹簧 扫描将2维草图实体沿着曲线扫描形成或切除三维实体。 扫描成型
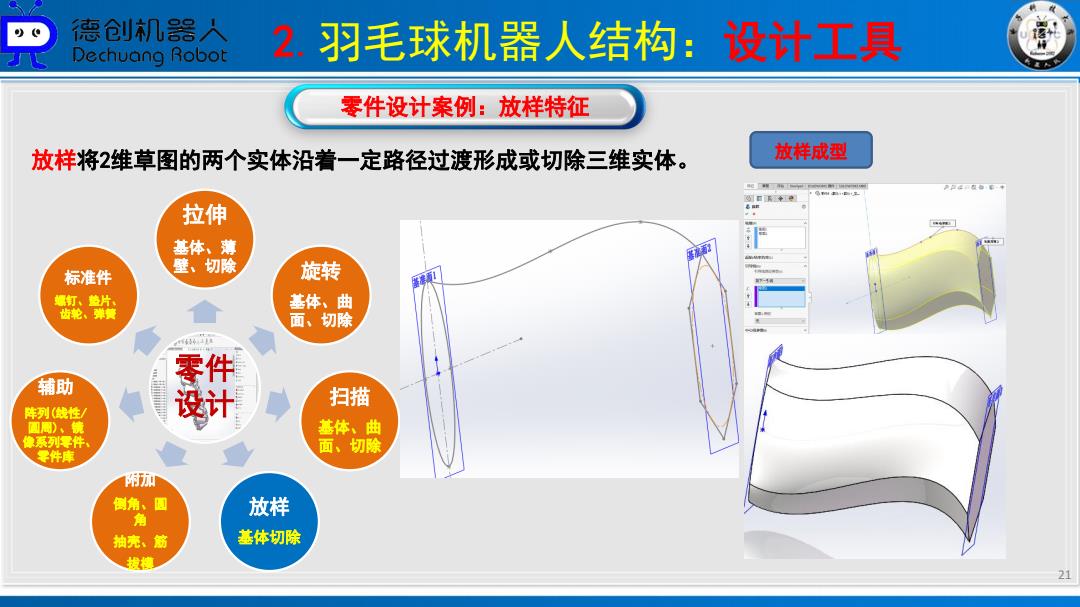
德仓创机器人 Dechuang Robot 2.羽毛球机器人结构:设计工具 零件设计案例:放样特征 放样将2维草图的两个实体沿着一定路径过渡形成或切除三维实体。 放样成型 P4夜●中 口◆e 拉伸 基体、薄 标准件 壁、切除 旋转 就 基体、曲 面、切除 辅助 扫描 列(线性 适韩 基体、曲 系量 面、切除 附 倒角、圆 放样 角 抽亮、筋 基体切除 21
2.羽毛球机器人结构:设计工具 21 零件设计案例:放样特征 零件 设计 拉伸 基体、薄 壁、切除 旋转 基体、曲 面、切除 扫描 基体、曲 面、切除 放样 基体切除 附加 倒角、圆 角 抽壳、筋 拔模 辅助 阵列(线性/ 圆周)、镜 像系列零件、 零件库 标准件 螺钉、垫片、 齿轮、弹簧 放样将2维草图的两个实体沿着一定路径过渡形成或切除三维实体。 放样成型