
德仓创机器人 Dechuang Robot 2.羽毛球机器人结构:设计工具 草图设计案例:基准面 DS SOLIDWORKS 文件阳细 /,可·N, 馆视基准面 上视善准面 回·9日A 基准面 鼎,回 前视 上视 特征 草图 评估DimXpert 转换实 辅助线 国⊕ 体引用 均可作为 草图 设计 号零件6(认<认显示状态1) 佑视蒸准回 基准面 园History 窗传醋 右视 辅助面 镜向 几何 ,回注据 阵列 约束 污材质<未指定, N前基生面 N上视基准香 N右视基题 原点 12
2.羽毛球机器人结构:设计工具 12 草图 设计 基准面 辅助线 几 何 约束 镜 向 阵列 转换实 体引用 草图设计案例:基准面 前视 上视 右视 辅助面 均可作为 基准面
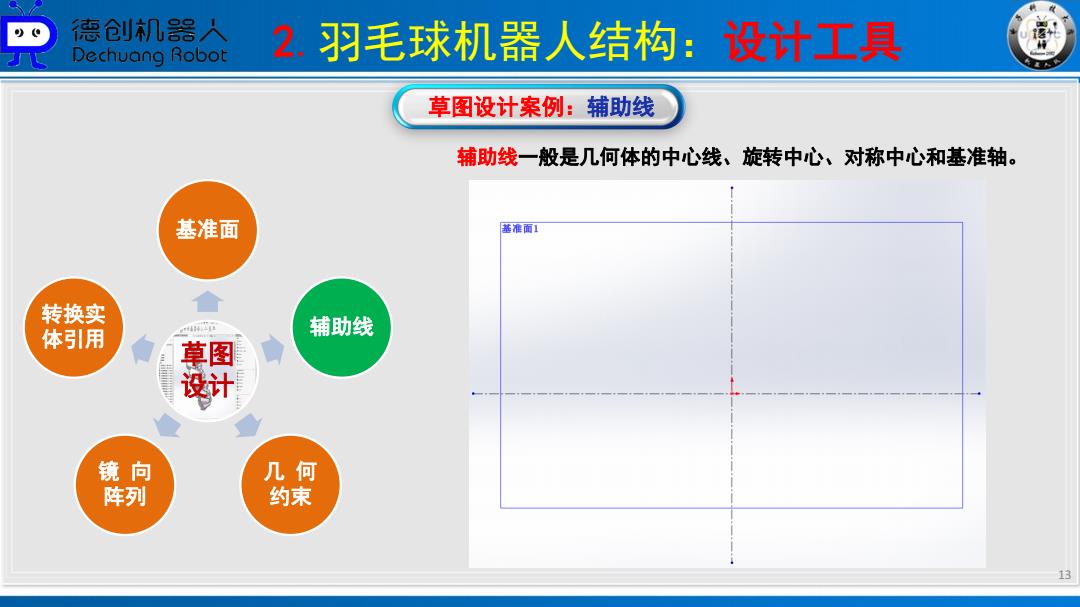
德仓创机器人 Dechuang Robot 2.羽毛球机器人结构:设计工具 草图设计案例:辅助线 辅助线一般是几何体的中心线、旋转中心、对称中心和基准轴。 基准面 基准面工 转换实 体引用 辅助线 草图 设计 镜向 几何 阵列 约束 13
2.羽毛球机器人结构:设计工具 13 草图 设计 基准面 辅助线 几 何 约束 镜 向 阵列 转换实 体引用 草图设计案例:辅助线 辅助线一般是几何体的中心线、旋转中心、对称中心和基准轴
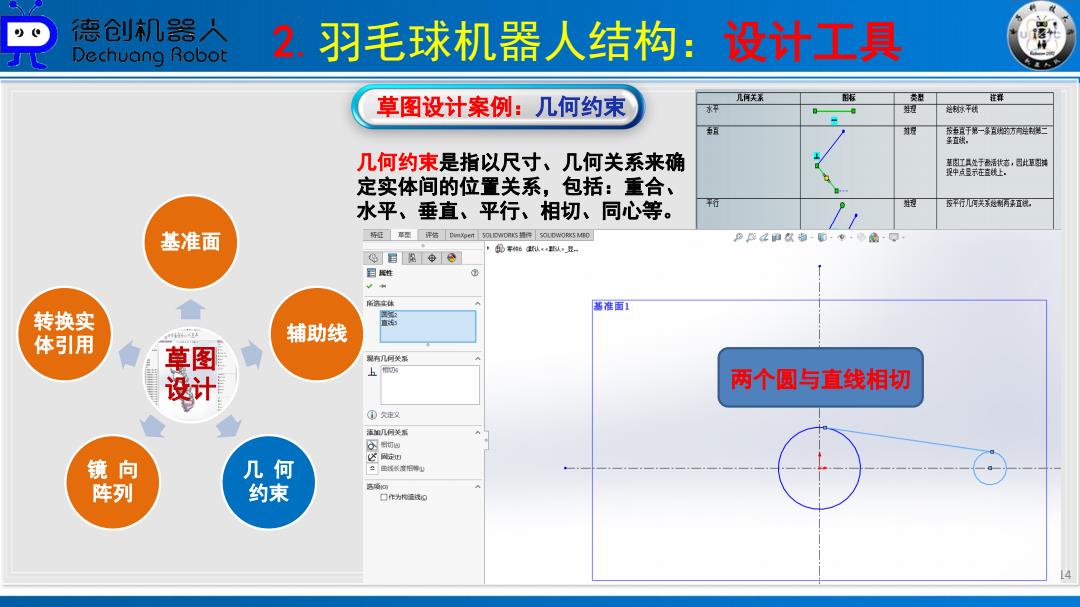
9 德仓创机器人 Dechuang Robot 2.羽毛球机器人结构:设计工具 草图设计案例:几何约束 几何关系 怒利球干和 技年员于第一条五万阿制日 3直线。 几何约束是指以尺寸、几何关系来确 整图工典处于密,活代室,目此草塑时 中点示在线上 定实体间的位置关系,包括:重合、 水平、垂直、平行、相切、同心等。 干行 平行儿关秘刷丙直诚 基准面 目鬼中⊙ 目性 所济实体 基准面1 转换实 体引用 辅助线 草图 规有几同关票 上 设计 两个圆与直线相切 ①宠义 酒加几何关系 因回 心区克如 镜向 几何 二国强长度旧得如 阵列 约束 口作为梅线0 14
2.羽毛球机器人结构:设计工具 14 草图设计案例:几何约束 草图 设计 基准面 辅助线 几 何 约束 镜 向 阵列 转换实 体引用 几何约束是指以尺寸、几何关系来确 定实体间的位置关系,包括:重合、 水平、垂直、平行、相切、同心等。 两个圆与直线相切
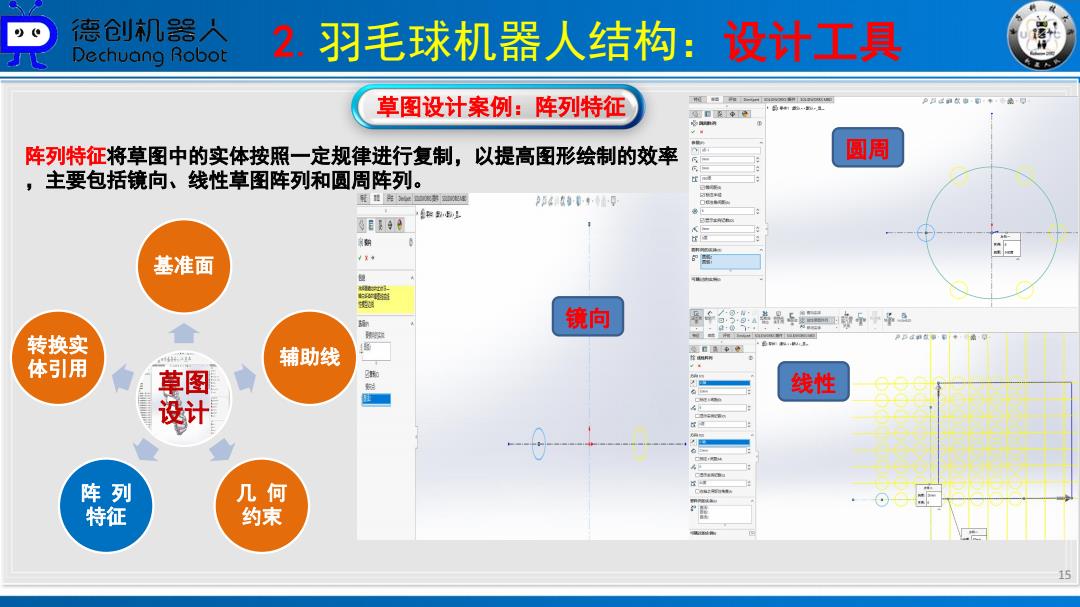
德仓创机器人 Dechuang Robot 2.羽毛球机器人结构:设计工具 草图设计案例:阵列特征 绿的…,且 阵列特征将草图中的实体按照一定规律进行复制, 以提高图形绘制的效率 圆周 ,主要包括镜向、线性草图阵列和圆周阵列。 酰件常起E P540-049 和5 s是9日 基准面 镜向 转换实 ■伞密 体引用 辅助线 莫图 线性 设计 阵列 几何 特征 约束 15
2.羽毛球机器人结构:设计工具 15 草图设计案例:阵列特征 阵列特征将草图中的实体按照一定规律进行复制,以提高图形绘制的效率 ,主要包括镜向、线性草图阵列和圆周阵列。 草图 设计 基准面 辅助线 几 何 约束 阵 列 特征 转换实 体引用 镜向 圆周 线性
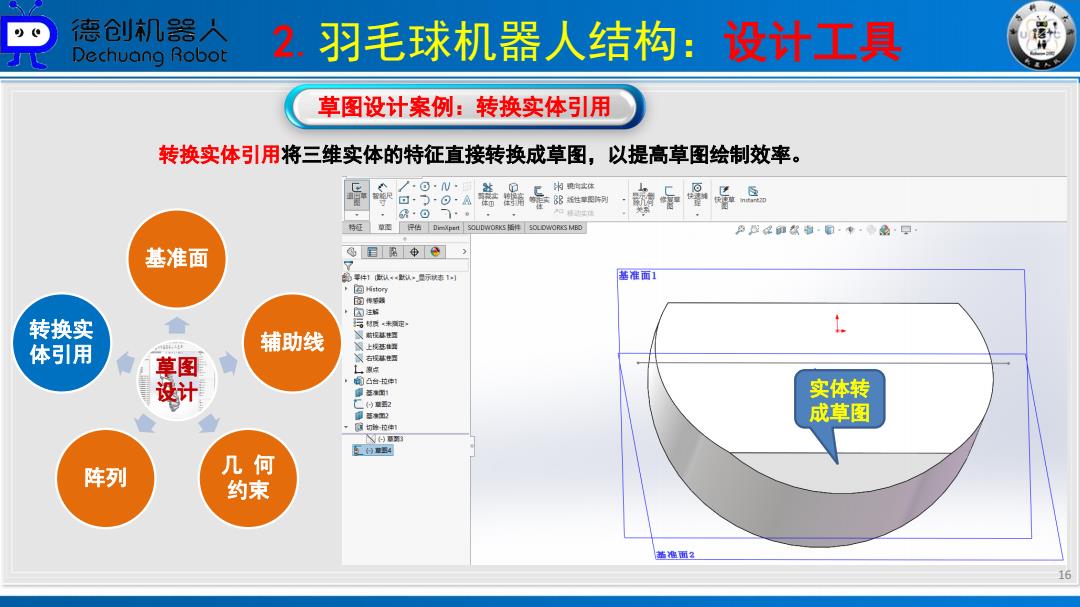
德仓创机器人 Dechuang Robot 2.羽毛球机器人结构:设计工具 草图设计案例:转换实体引用 转换实体引用将三维实体的特征直接转换成草图,以提高草图绘制效率。 回·门·⊙A 意年坚量国 特证草覆估DimXpert SOUDWORXS断种s0 DWORKS MED 孕型保m然当·服·中·骨最·厚 基准面 目中 7 岛果件针,,里示铁本1可 基准面1 面棒器 转换实 1. 体引用 辅助线 脑视基性四 草 义右战基业四 设计 的凸台拉中1 童还准面1 实体转 已付2 迎蓝五2 成草图 切拉 V内 点的坚4 阵列 几何 约束 站准面2 16
2.羽毛球机器人结构:设计工具 16 草图设计案例:转换实体引用 转换实体引用将三维实体的特征直接转换成草图,以提高草图绘制效率。 草图 设计 基准面 辅助线 几 何 约束 阵列 转换实 体引用 实体转 成草图