相控阵天线 电子科技大学
相控阵天线 电子科技大学
一 、概论 相控阵雷达:采用相控阵天线的雷达 。 电扫描阵列 快速变化的波束指向和波束形状 增加工作方式和雷达功能 巨大的自适应能力和新的工作潜力 相扫、频扫、开关、实时延迟 20世纪60年代无源相控阵雷达问世 20世纪80年代固态有源相控阵雷达 远距离,边扫描边跟踪 时间分割技术 多目标实时搜索、截获、引导、识别 少量阵元失效,仍能有效工作 自适应抑制干扰、频率捷变、极化捷变 相参诱饵、低截获概率
相控阵雷达:采用相控阵天线的雷达 • 电扫描阵列 • 快速变化的波束指向和波束形状 • 增加工作方式和雷达功能 • 巨大的自适应能力和新的工作潜力 一、概论 20世纪60年代 无源相控阵雷达问世 20世纪80年代 固态有源相控阵雷达 相扫、频扫、开关、实时延迟 远距离,边扫描边跟踪 时间分割技术 多目标实时搜索、截获、引导、识别 少量阵元失效,仍能有效工作 自适应抑制干扰、频率捷变、极化捷变 相参诱饵、低截获概率

二、组成 5大基本组成部分 T/R组件、阵列单元、馈电网络、移相器、波控机 AN/FPS-115“铺路爪”雷达 它是由两个平面阵组成,两个圆形无线阵面彼此成60度,每个阵面后领20 度,直径约30米,由2000个阵元组成,工作于P波段。扫描一次所需时间为 6秒,平均无故障工作时间可达450小时。用来探测弹道导弹,测试各个参 数,如速度、位置、发射和着落,点等,可以覆盖240°的方位角以及 3°~85°的高低仰角,探测距离一般为4800公里,对高弹道、雷达截面为 10平方米的潜射弹道导弹的探测距离可达5550公里
二、组成 T/R组件、阵列单元、馈电网络、移相器、波控机 它是由两个平面阵组成,两个圆形无线阵面彼此成60度,每个阵面后倾20 度,直径约30米,由2000个阵元组成,工作于P波段。扫描一次所需时间为 6秒,平均无故障工作时间可达450小时。用来探测弹道导弹,测试各个参 数,如速度、位置、发射和着落点等,可以覆盖240°的方位角以及 3°~85°的高低仰角,探测距离一般为4800公里,对高弹道、雷达截面为 10平方米的潜射弹道导弹的探测距离可达5550公里。 AN/FPS-115 “铺路爪” 雷达
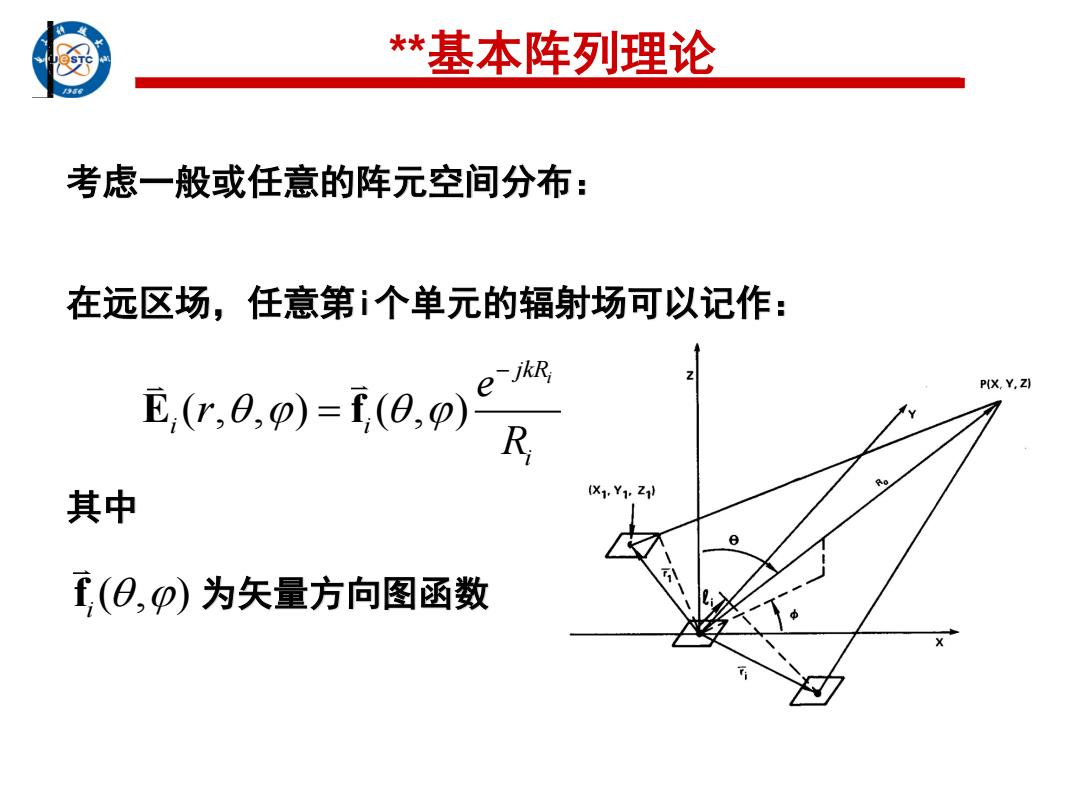
*基本阵列理论 考虑一般或任意的阵元空间分布: 在远区场,任意第个单元的辐射场可以记作: E(ca,)=f0,例e P(X,Y,Z) 其中 (X1.Y1.Z ①(0,p)为矢量方向图函数 X
**基本阵列理论 考虑一般或任意的阵元空间分布: 在远区场,任意第i个单元的辐射场可以记作: ( , , ) ( , ) i jkR i i i e r R E f ( , ) f i 为矢量方向图函数 其中
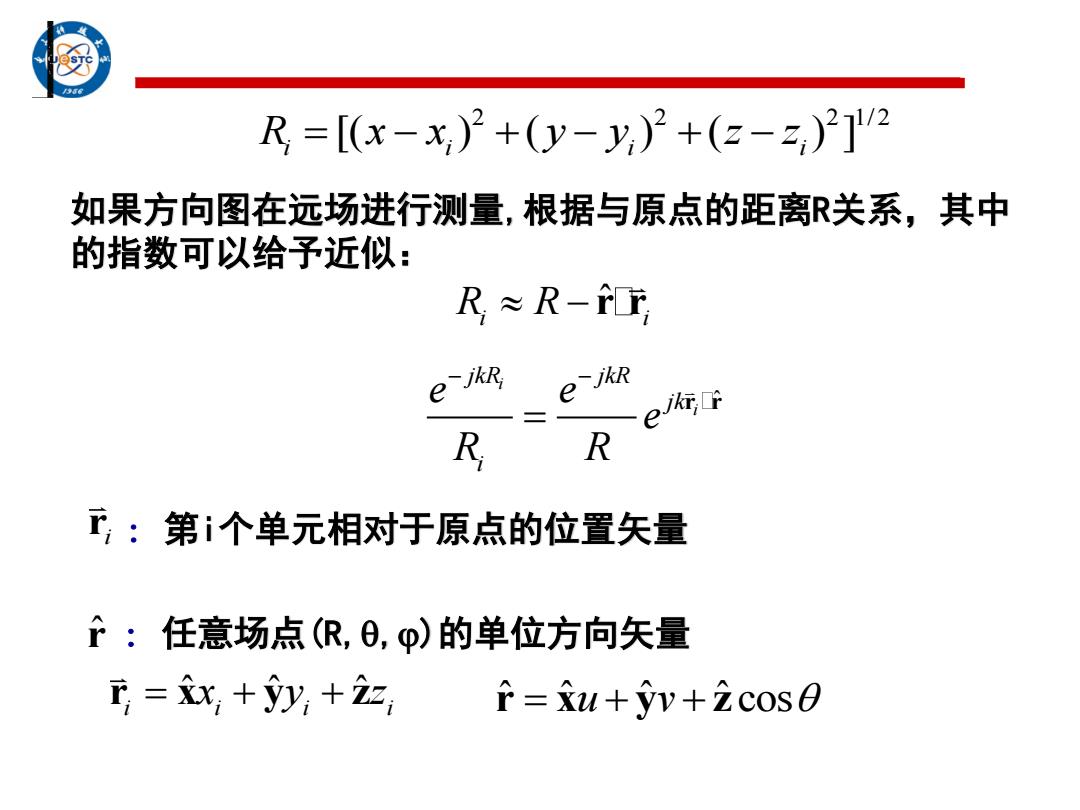
R=(x-x,)2+(y-y)2+(z-2,)2]2 如果方向图在远场进行测量,根据与原点的距离关系,其中 的指数可以给予近似: R≈R-fr e-jkR e-ikR e际 R R ;:第个单元相对于原点的位置矢量 F:任意场点(R,日,Φ)的单位方向矢量 i=x,+y,+22 f=u++cosO
如果方向图在远场进行测量,根据与原点的距离R关系,其中 的指数可以给予近似: 2 2 2 1/ 2 [( ) ( ) ( ) ] R x x y y z z i i i i ˆ R R i i r r ˆ i i jkR jkR jk i e e e R R r r i r :第i个单元相对于原点的位置矢量 ˆ ˆ ˆ i i i i r x y z x y z r ˆ :任意场点(R,,)的单位方向矢量 r x y z ˆ ˆ u v ˆ ˆ cos