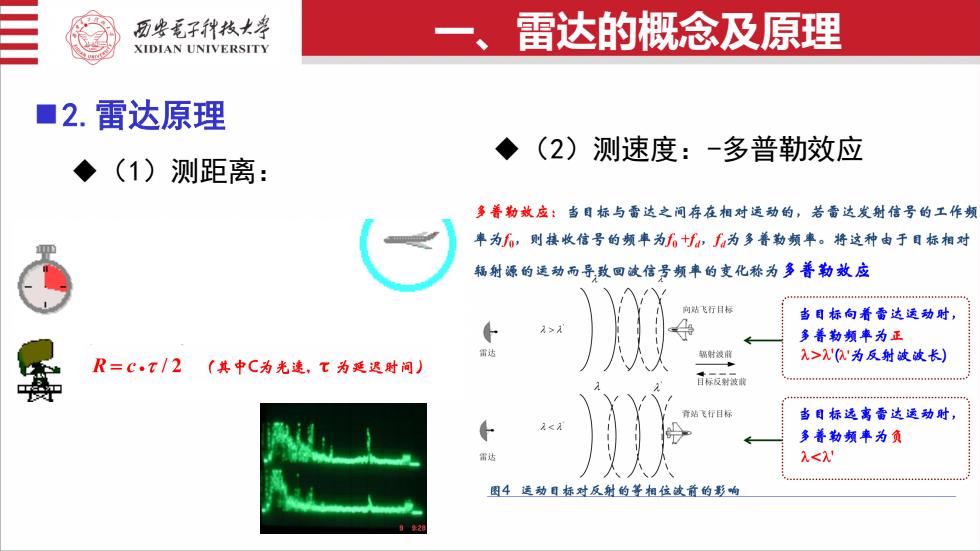
历安花子种枝大学 雷达的概念及原理 XIDIAN UNIVERSITY ■2.雷达原理 ◆(2)测速度:-多普勒效应 ◆(1)测距离: 多善物效应:当目标与雷达之间存在相对运动的,若雷达发射信号的工作频 率为f,则接收信号的频率为+f,f为多善勒频率。将这种由于目标相对 辐射源的运动而导,致回波信号频率的变化称为多普勒效应 向站飞行目标 当目标向着雷达运动附, 多善勒频率为正 雷达 辐射镂前 R=C,T/2(其中C为光速,℃为延迟时问) 入>入'('为反射波波长) 自标反设我 手fF年nes5tFn1e年31 E33自1年自nt中 站飞行目标 当目标远离雷达运动时, 多善勒频率为负 雷达 1< 图4运动可标对反射的等相位波前的影响
一、雷达的概念及原理 ◼2.雷达原理 ◆(1)测距离: 9 ◆(2)测速度:-多普勒效应
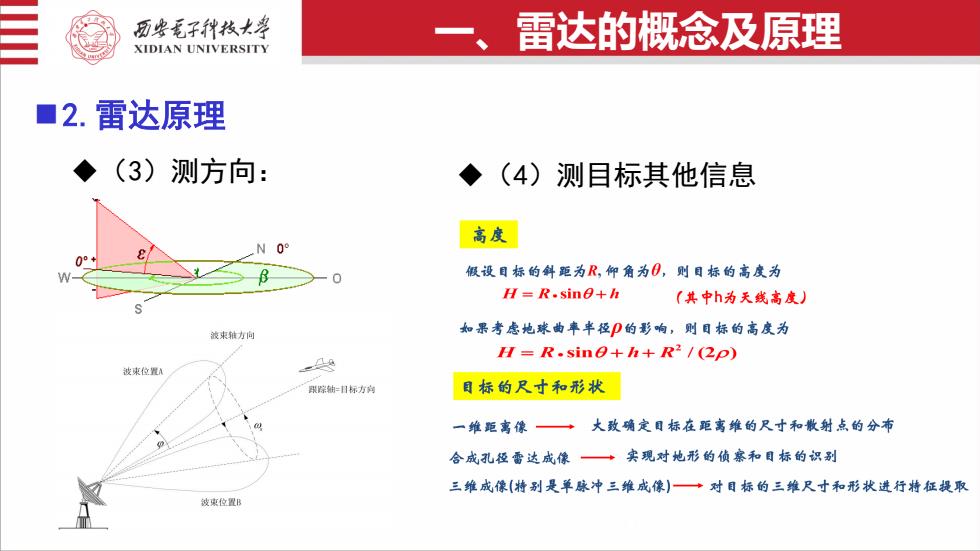
历些毛子种技大兽 雷达的概念及原理 XIDIAN UNIVERSITY ■2.雷达原理 ◆(3)测方向: ◆(4) 测目标其他信息 高度 N09 假设目标的斜距为R,仰角为O,则目标的高度为 0 H=R.sin+h (其中h为天线高度) 波束轴方向 如果考虑地球曲率半径P的影响,则目标的高度为 H=R.sine+h+R2/(2p) 被束位置A 是类 装踪触=日标方向 目标的尺寸和形状 一维距离像→·大致确定目标在距离维的尺寸和散射点的分布 合成孔径雷达成像一实现对地形的侦察和目标的识别 三维成像(特别是单脉冲三维成像)→对目标的三维尺寸和形状进行特征提取 被束位置B
一、雷达的概念及原理 ◼2.雷达原理 ◆(3)测方向: 10 ◆(4)测目标其他信息

历些毛子代技大¥ 雷达的概念及原理 XIDIAN UNIVERSITY ■2.雷达原理 ◆雷达成像 ◆识别(确定目标的属性) 坶克炮筒 坦克阵地光学照片 1in分辨率SAR图像
一、雷达的概念及原理 ◼2.雷达原理 ◆雷达成像 11 ◆识别(确定目标的属性)
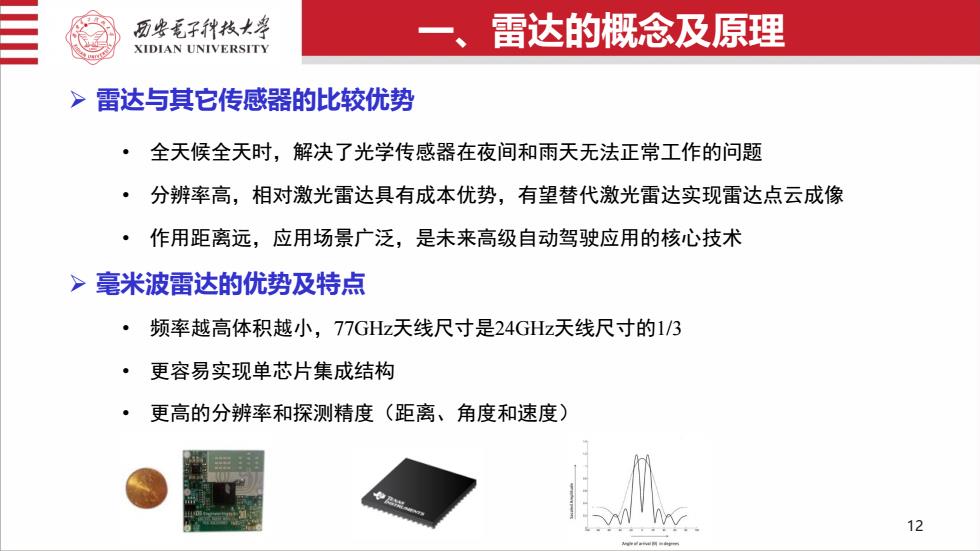
历些毛子种技大兽 雷达的概念及原理 XIDIAN UNIVERSITY >雷达与其它传感器的比较优势 ·全天候全天时,解决了光学传感器在夜间和雨天无法正常工作的问题 ·分辨率高,相对激光雷达具有成本优势,有望替代激光雷达实现雷达点云成像 ·作用距离远,应用场景广泛,是未来高级自动驾驶应用的核心技术 >毫米波雷达的优势及特点 ·频率越高体积越小,77GHz天线尺寸是24GHz天线尺寸的1/3 ·更容易实现单芯片集成结构 ·更高的分辨率和探测精度(距离、角度和速度) 12
12 一、雷达的概念及原理 ➢ 毫米波雷达的优势及特点 ➢ 雷达与其它传感器的比较优势 • 频率越高体积越小,77GHz天线尺寸是24GHz天线尺寸的1/3 • 更容易实现单芯片集成结构 • 更高的分辨率和探测精度(距离、角度和速度) • 全天候全天时,解决了光学传感器在夜间和雨天无法正常工作的问题 • 分辨率高,相对激光雷达具有成本优势,有望替代激光雷达实现雷达点云成像 • 作用距离远,应用场景广泛,是未来高级自动驾驶应用的核心技术
历些毛子代枚大学 二、雷达的发展历史 XIDIAN UNIVERSITY ■1.雷达的诞生及发展初期 ◆1842年,奥地利物理学家多普勒一率先提出了速度与音高关系的多普勒效应。 ◆1865英国物理学家Maxwe1一描述了电磁场理论 ◆1886德国物理学家Hertz一发现了电磁场并证明了MaxwelI的理论 ◆1904年德国工程师Hul smeyer一发明了用电磁波测量船距的装置(第一次雷达测试) ◆1936年,英国罗伯特•沃特森·瓦特在索夫克海岸架起了第一个雷达站
二、雷达的发展历史 ◼1.雷达的诞生及发展初期 ◆1842年,奥地利物理学家多普勒——率先提出了速度与音高关系的多普勒效应。 ◆1865英国物理学家Maxwell ——描述了电磁场理论 ◆1886德国物理学家Hertz ——发现了电磁场并证明了 Maxwell 的理论 ◆1904年德国工程师Hulsmeyer ——发明了用电磁波测量船距的装置(第一次雷达测试) ◆1936年,英国罗伯特•沃特森•瓦特在索夫克海岸架起了第一个雷达站。 13