
Chapter 5 Steering System Section 1 Mode and Principle of Steering 2.2 Dynamic Analysis Assumptions: (1)Four-wheel vehicles'front wheels are directly installed on the same front axle,and the middle part of the front axle is hinged to the body; (2)The speed of vehicle is low when steering,so the centrifugal inertia force can not be considered 机被与电子工程原 Automobile and Tractor Northwest A&F University
Automobile and Tractor Northwest A&F University Chapter 5 Steering System 2.2 Dynamic Analysis Assumptions: (1) Four-wheel vehicles’ front wheels are directly installed on the same front axle, and the middle part of the front axle is hinged to the body; (2) The speed of vehicle is low when steering, so the centrifugal inertia force can not be considered. Section 1 Mode and Principle of Steering
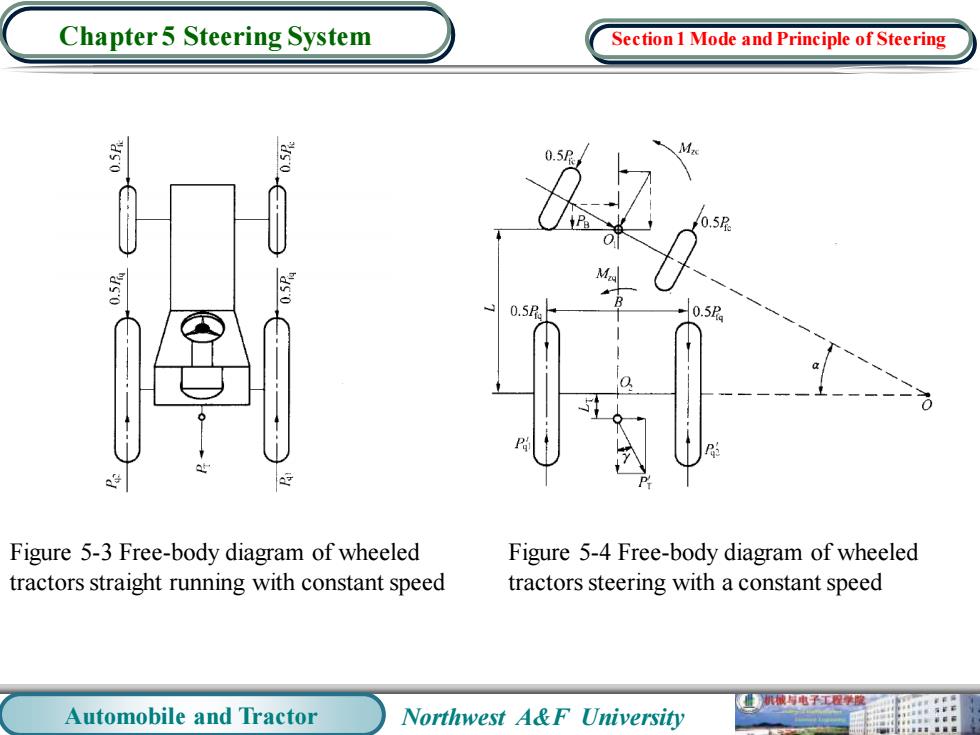
Chapter 5 Steering System Section 1 Mode and Principle of Steering Figure 5-3 Free-body diagram of wheeled Figure 5-4 Free-body diagram of wheeled tractors straight running with constant speed tractors steering with a constant speed 械电子工程学 Automobile and Tractor Northwest A&F University
Automobile and Tractor Northwest A&F University Chapter 5 Steering System Figure 5-3 Free-body diagram of wheeled tractors straight running with constant speed Figure 5-4 Free-body diagram of wheeled tractors steering with a constant speed Section 1 Mode and Principle of Steering
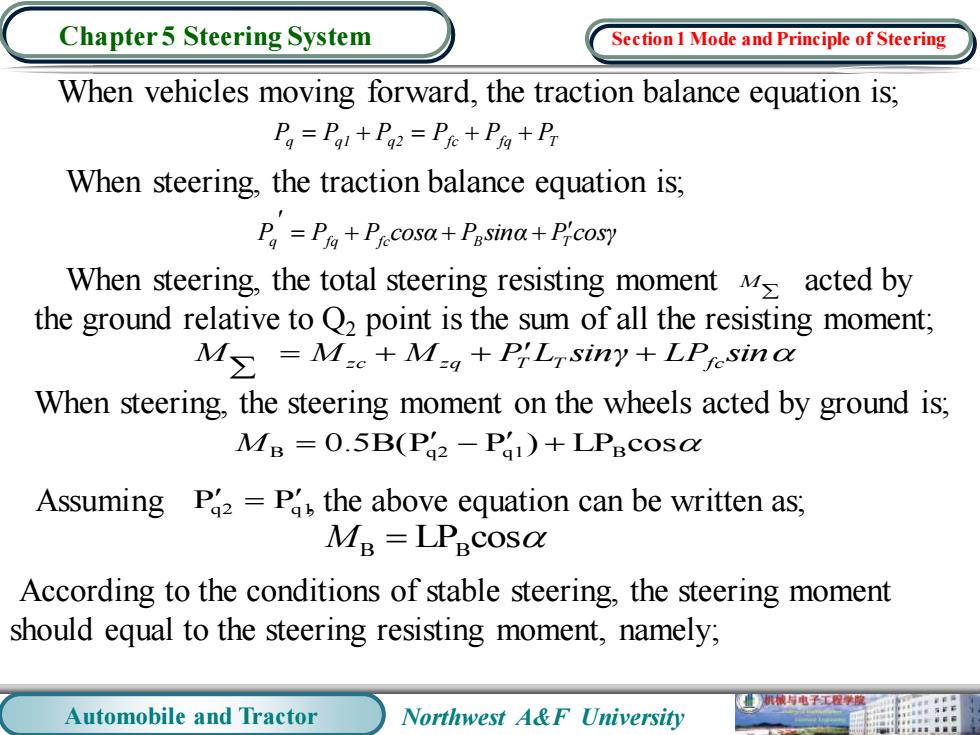
Chapter 5 Steering System Section 1 Mode and Principle of Steering When vehicles moving forward,the traction balance equation is; Pa PaI P92=Pre Prg+Pr When steering,the traction balance equation is; PP+Prcosa+Pasina+P'cosy When steering,the total steering resisting moment acted by the ground relative to Q2 point is the sum of all the resisting moment; M M-e+Mo+PiLrsiny+LPresin a When steering,the steering moment on the wheels acted by ground is; MB =0.5B(P2 -P)+LPBcosa Assuming P2=P the above equation can be written as; MB LPRcosa According to the conditions of stable steering,the steering moment should equal to the steering resisting moment,namely; 机被与电子工程学根 Automobile and Tractor Northwest A&F University
Automobile and Tractor Northwest A&F University Chapter 5 Steering System Pq = Pq1 + Pq2 = Pf c + Pf q + PT When vehicles moving forward, the traction balance equation is; When steering, the traction balance equation is; P P P cosα P sinα P cosγ q f q f c B T = + + + When steering, the total steering resisting moment acted by the ground relative to Q2 point is the sum of all the resisting moment; M M = M z c + M z q + PT LT sinγ + LPf csin When steering, the steering moment on the wheels acted by ground is; MB = 0.5B(Pq 2 − Pq 1 ) + LPB cos Assuming Pq2 = Pq1 , the above equation can be written as; MB = LPB cos According to the conditions of stable steering, the steering moment should equal to the steering resisting moment, namely; Section 1 Mode and Principle of Steering
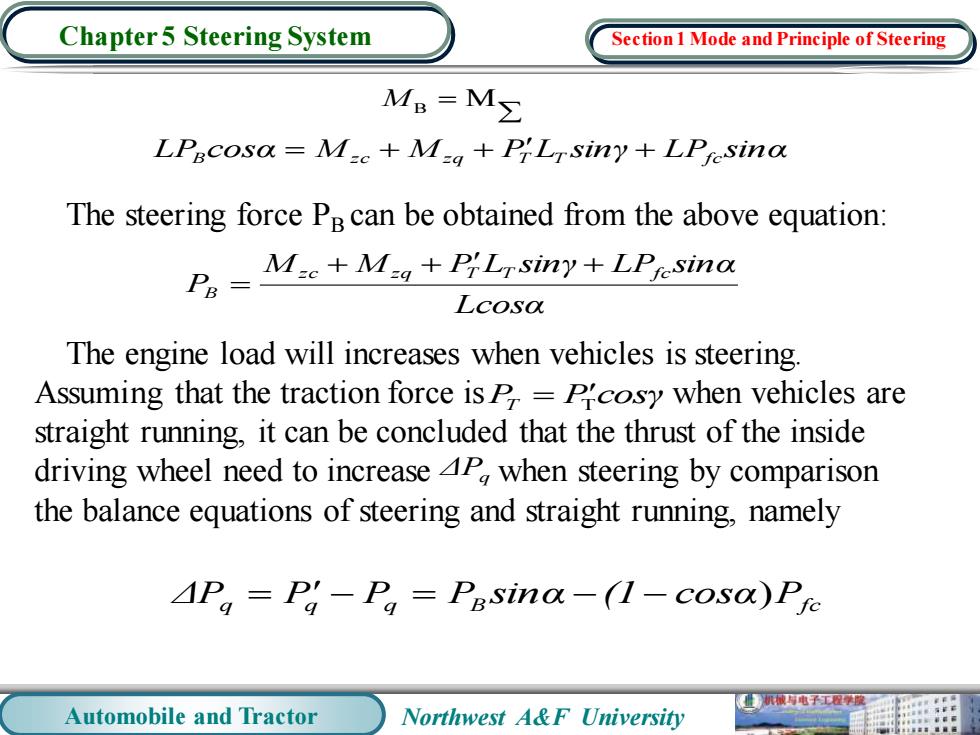
Chapter 5 Steering System Section 1 Mode and Principle of Steering MB=MZ LPecosa=M-e+M-+P;Lrsiny+LPresina The steering force Pe can be obtained from the above equation: Pn-Msc+Man+PiLrsiny+LPnsina Lcosa The engine load will increases when vehicles is steering. Assuming that the traction force is B=Prcosy when vehicles are straight running,it can be concluded that the thrust of the inside driving wheel need to increase P,when steering by comparison the balance equations of steering and straight running,namely AP=P-P=Pesina-(1-cosa)Pre 城电子工程学酸 Automobile and Tractor Northwest A&F University
Automobile and Tractor Northwest A&F University Chapter 5 Steering System The steering force PB can be obtained from the above equation: Lcosα M M P L sinγ LP sinα P z c z q T T f c B + + + = The engine load will increases when vehicles is steering. Assuming that the traction force is when vehicles are straight running, it can be concluded that the thrust of the inside driving wheel need to increase when steering by comparison the balance equations of steering and straight running, namely P P cosγ T T = q q q B cosα Pf c ΔP = P − P = P sinα −(1− ) ΔPq MB = M LPB cosα = Mz c + Mz q + PT LT sinγ + LPf csinα Section 1 Mode and Principle of Steering
Chapter 5 Steering System Section 2 Wheeled Vehicle's Steering System 1.The Basic Components of Deflecting Wheels Steering System Deflecting wheels steering system consists of control mechanism, steering gear,steering linkage,differential,etc..Its purpose is to change the people's manipulate into the appropriate steering wheel deflection and to ensure that the internal and external steering wheels'deflection angles a,B satisfy the Ackerman formula. Steering linkages usually have two forms:Steering Trapezium type and two-tension bar type. 机械电子工程学擦 Automobile and Tractor Northwest A&F University
Automobile and Tractor Northwest A&F University Chapter 5 Steering System 1. The Basic Components of Deflecting Wheels Steering System Deflecting wheels steering system consists of control mechanism, steering gear, steering linkage, differential, etc.. Its purpose is to change the people’s manipulate into the appropriate steering wheel deflection and to ensure that the internal and external steering wheels’ deflection angles α, β satisfy the Ackerman formula. Steering linkages usually have two forms: Steering Trapezium type and two-tension bar type. Section 2 Wheeled Vehicle’s Steering System