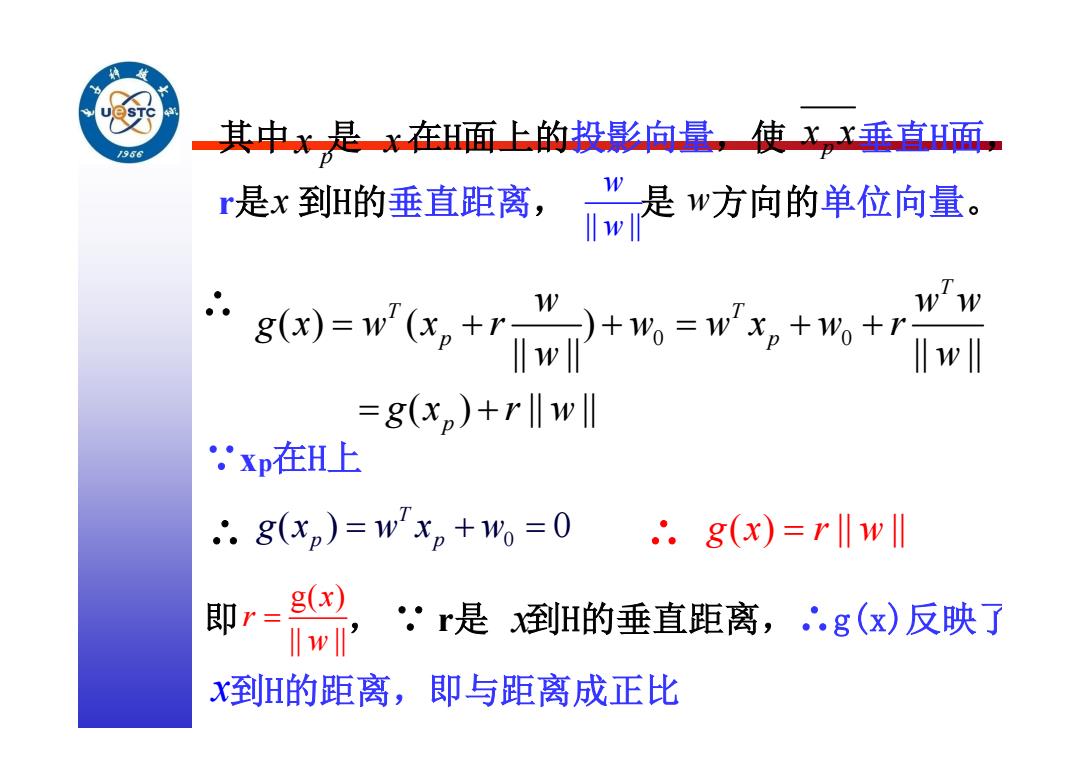
其中x是在面上的投影向量,使x,x垂直面。 966 r是x到H的垂直距离, 是w方向的单位向量。 =rr7=多+w* w =g(x2)+r‖w‖ .'xp在H上 .8(x2)=1wxp+w=0 .g(x)=rlwl‖ -9 ,r是到H的垂直距离,∴g(x)反映了 x到H的距离,即与距离成正比
其中 是 在H面上的投影向量,使 垂直H面, r是 到H的垂直距离, 是 方向的单位向量。 p x x x p x x || || w w w 0 0 ( ) ( ) || || || || ( ) || || T T T p p p w w w g x w x r w w x w r w w g x r w ∴ ∵xp在H上 0 ( ) 0 T p p ∴ g x w x w ∴ g x r w ( ) || || g( ) || || x r w 即 , ∵ r是 x到H的垂直距离,∴g(x)反映了 x到H的距离,即与距离成正比
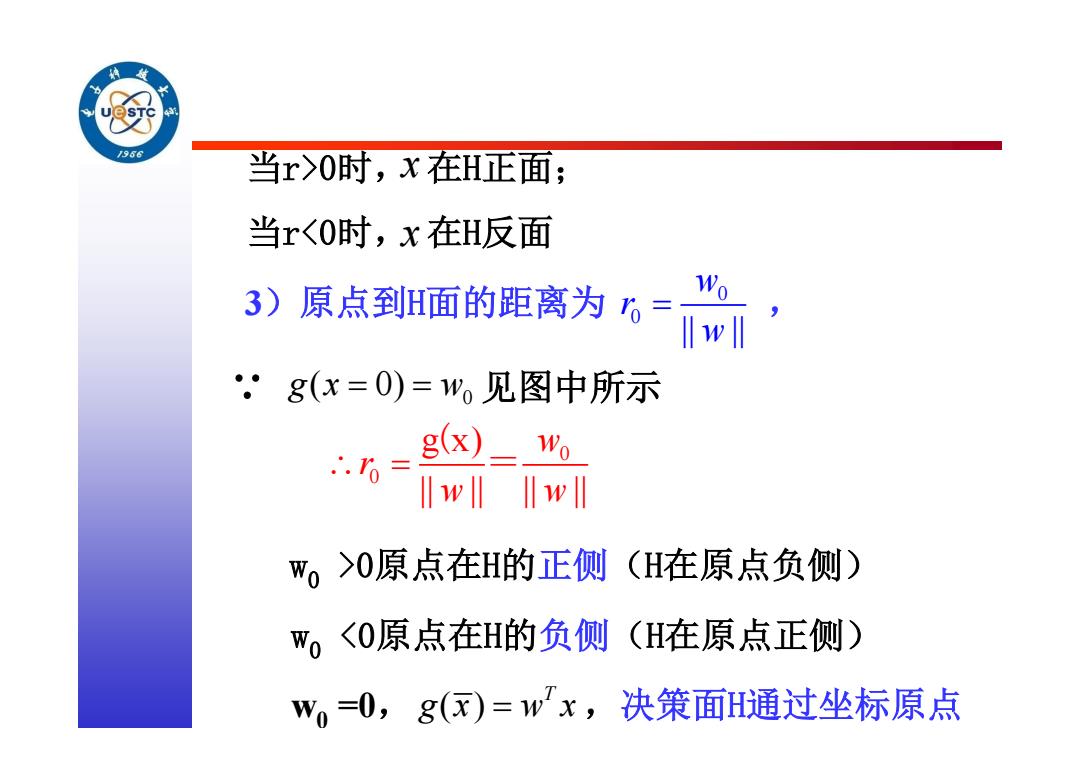
/96 当r>0时,x在H正面; 当r<0时,x在H反面 3)原点到面的距离为6= W w .·8(x=0)=w见图中所示 g(x)Wo lwllwll W。>0原点在H的正侧(H在原点负侧) W。<0原点在H的负侧 (H在原点正侧) w=0,g()=wx,决策面H通过坐标原点
当r>0时, 在H正面; 当r<0时, 在H反面 x x 3)原点到H面的距离为 0 0 , || || w r w ∵ g x w ( 0) 0 见图中所示 w0 >0原点在H的正侧(H在原点负侧) w0 <0原点在H的负侧(H在原点正侧) w0 =0, g x w x ( ) T ,决策面H通过坐标原点 0 0 g x) || || || || w r w w ( =
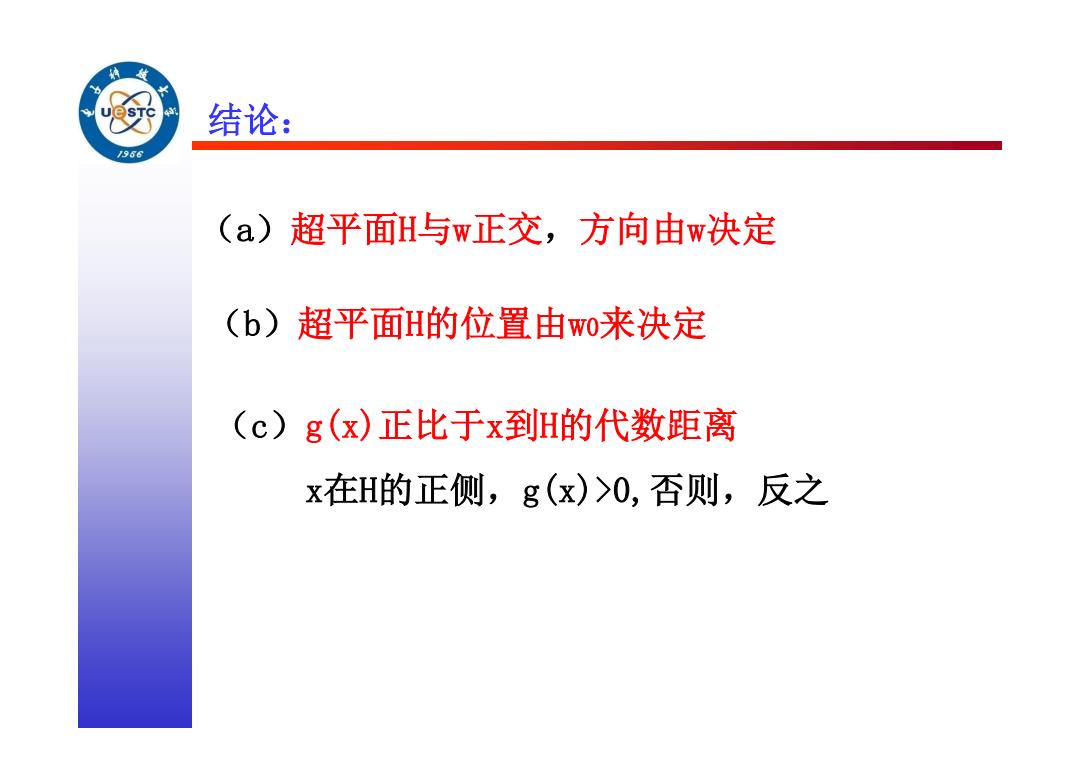
结论: J966 (a)超平面H与w正交,方向由w决定 (b)超平面H的位置由w0来决定 (c)g(x)正比于x到H的代数距离 x在H的正侧,g(x)>0,否则,反之
结论: (a)超平面H与w正交,方向由w决定 (b)超平面H的位置由w0来决定 (c)g(x)正比于x到H的代数距离 x在H的正侧,g(x)>0,否则,反之
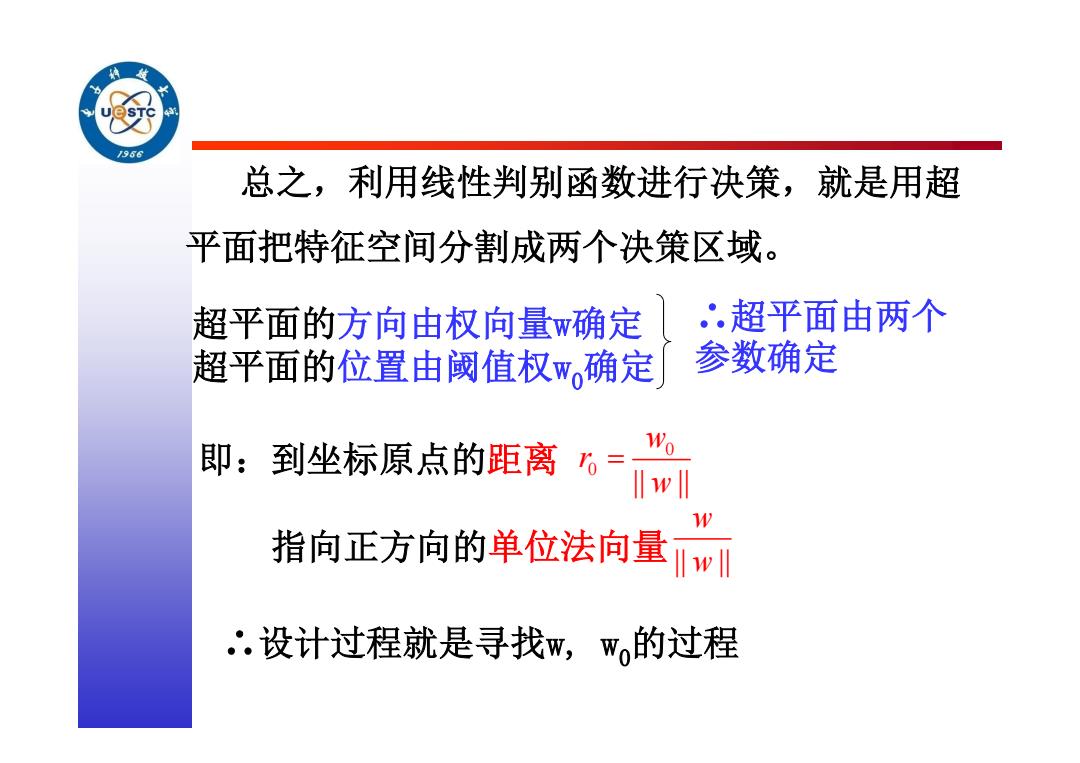
/966 总之,利用线性判别函数进行决策,就是用超 平面把特征空间分割成两个决策区域。 超平面的方向由权向量w确定∴.超平面由两个 超平面的位置由阈值权w确定 参数确定 即:到坐标原点的距离 指向正方向的单位法向量w ∴.设计过程就是寻找w,W的过程
总之,利用线性判别函数进行决策,就是用超 平面把特征空间分割成两个决策区域。 0 0 || || w r w 即:到坐标原点的距离 ∴设计过程就是寻找w, w0的过程 超平面的方向由权向量w确定 超平面的位置由阈值权w0确定 ∴超平面由两个 参数确定 || || w 指向正方向的单位法向量 w
J966 设计线性分类器的主要步骤 设计线性分类器就是利用训练样本集建立 线性判别函数 .仅有w、w是未知的,∴.设计线性分类器的过程 就是找最好的w、W的过程
设计线性分类器的主要步骤 设计线性分类器就是利用训练样本集建立 线性判别函数 ∵仅有w、w0是未知的,∴设计线性分类器的过程 就是找最好的w、w0的过程