4、移动部 靠人手工操作。 改进:自动行走 钢架单轨 守顺式行大9 China Agricultural University
China Agricultural University 4、移动部 靠人手工操作。 改进:自动行走 钢架单轨

三、久保田的柑桔收获机器人 个大寸国 China Agricultural University
China Agricultural University 三、久保田的柑桔收获机器人
B 2号臂 1号臂 控制器 机械手 移动台车 安装台 主臂 机械手 机器人 守大T大 China Agricultural University
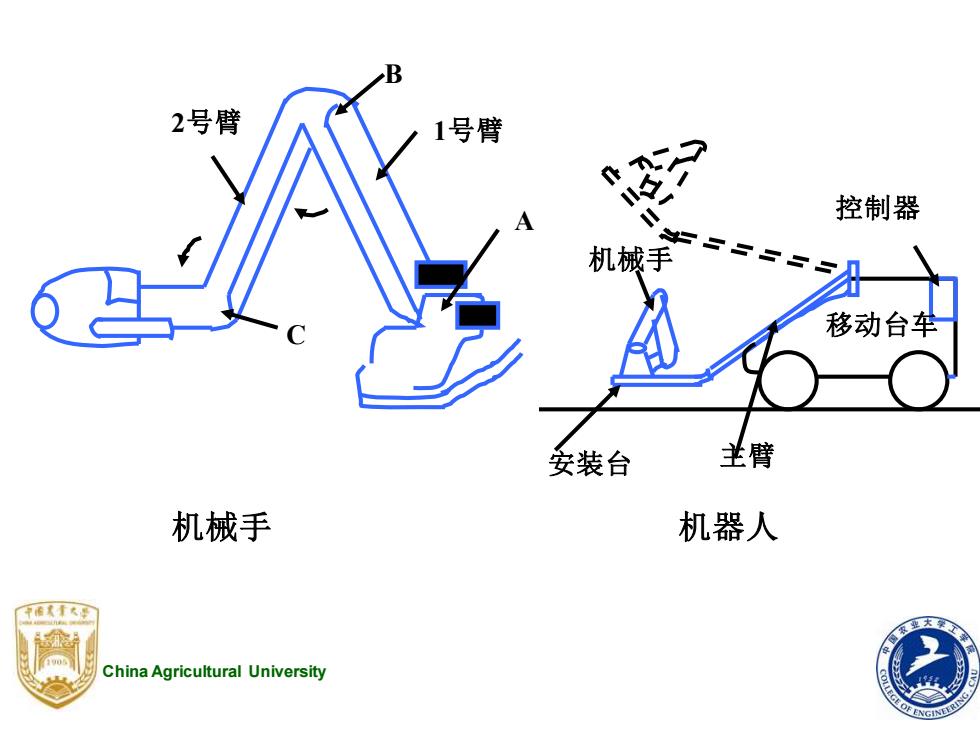
China Agricultural University 2号臂 1号臂 B A C 安装台 机械手 主臂 控制器 移动台车 机械手 机器人
1、机械手 3个自由度关节型, 关节B与关节C的速度比2:1 手臂1与手臂2长度相同 手爪可以直线运动,接近果实 关节型机械手容易折叠,结构紧凑。适宜狭窄 的果园。 个而KT大型 China Agricultural University
China Agricultural University 1、机械手 3个自由度关节型, 关节B与关节C 的速度比2:1 手臂1与手臂2长度相同 手爪可以直线运动,接近果实 关节型机械手容易折叠,结构紧凑。适宜狭窄 的果园
2、手爪 手爪里组装有检测果实位置的彩色电视摄像机 理发推式刀片 梳子式笼套 闪光灯 吸盘 接近开关 差动机构 半圆叶片 彩色摄像机 (a)构造 守顺其大9 China Agricultural University
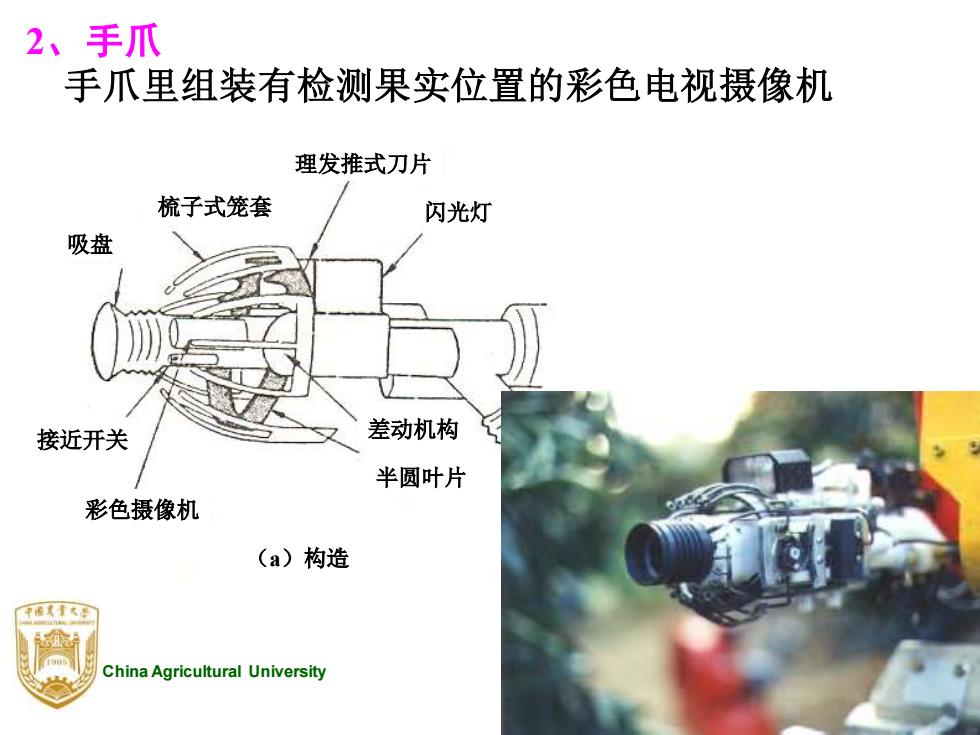
China Agricultural University 2、手爪 手爪里组装有检测果实位置的彩色电视摄像机 接近开关 彩色摄像机 吸盘 (a)构造 (b)动作顺序 半圆叶片 差动机构 梳子式笼套 理发推式刀片 闪光灯 剪断 包住 吸住 接近开关 彩色摄像机 吸盘 (a)构造 (b)动作顺序 半圆叶片 差动机构 梳子式笼套 理发推式刀片 闪光灯 剪断 包住 吸住