
收获过程: 吸住 (1)用吸力盘固定 柑桔 (2)将柑桔吸入手 掌中。 剪刀前移,笼壳前移, 包住 将要摘的果实与其他 果实分开。 (3)剪断果蒂。 剪断 个KT大型 (b)动作顺序 China Agricultural University
China Agricultural University 收获过程: (1)用吸力盘固定 柑桔 (2)将柑桔吸入手 掌中。 剪刀前移,笼壳前移, 将要摘的果实与其他 果实分开。 接近开关 (3)剪断果蒂。 彩色摄像机 吸盘 (a)构造 (b)动作顺序 半圆叶片 差动机构 梳子式笼套 理发推式刀片 闪光灯 剪断 包住 吸住 接近开关 彩色摄像机 吸盘 (a)构造 (b)动作顺序 半圆叶片 差动机构 梳子式笼套 理发推式刀片 闪光灯 剪断 包住 吸住
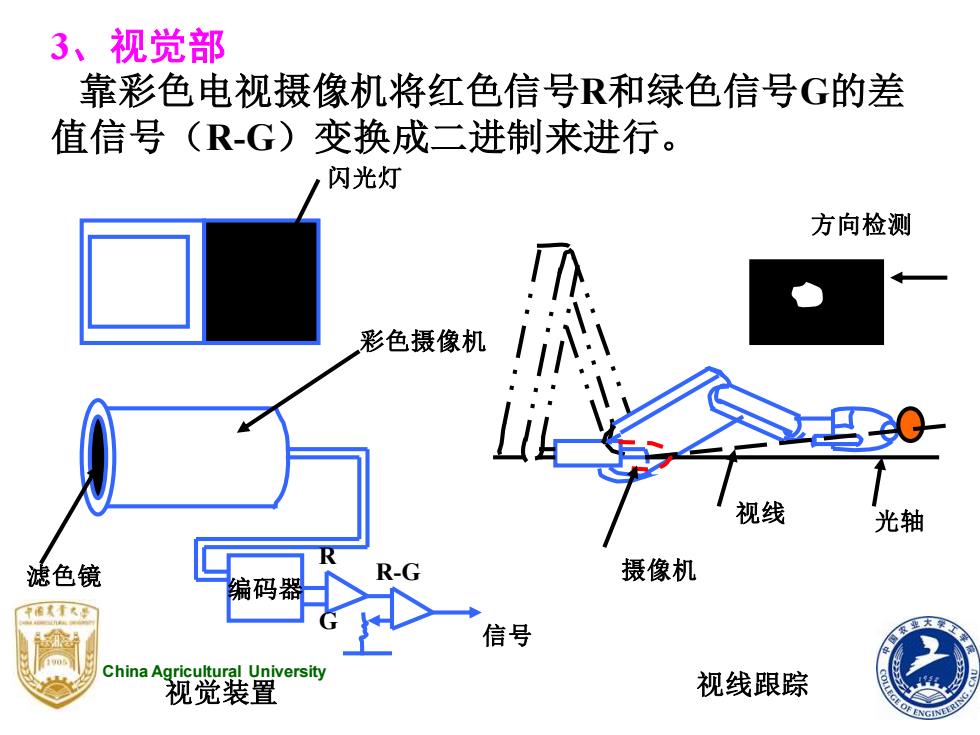
3、视觉部 靠彩色电视摄像机将红色信号R和绿色信号G的差 值信号(R-G)变换成二进制来进行。 闪光灯 方向检测 彩色摄像机 马0 视线 光轴 滤色镜 R-G 摄像机 编码器 信号 China Agricultural University 视觉装置 视线跟踪
China Agricultural University 3、视觉部 靠彩色电视摄像机将红色信号R和绿色信号G的差 值信号(R-G)变换成二进制来进行。 编码器 滤色镜 彩色摄像机 闪光灯 R G R-G 信号 摄像机 视线 光轴 方向检测 视觉装置 视线跟踪
摄像机带有快门功能,通过自然密度过滤镜(ND, Neutral Density filter)减弱自然光线后,再启动与快 门联动的闪光灯。 光线的可照范围作为机械手的作业活动范围 该视觉装置不是用于检测果实的距离,而是检测 果实位置的方向,当检测出方向后,使手爪沿视线方 向前移,直到果实的近处,开始收获果实。 个而KT大型 China Agricultural University
China Agricultural University 摄像机带有快门功能,通过自然密度过滤镜(ND, Neutral Density filter)减弱自然光线后,再启动与快 门联动的闪光灯。 光线的可照范围作为机械手的作业活动范围 该视觉装置不是用于检测果实的距离,而是检测 果实位置的方向,当检测出方向后,使手爪沿视线方 向前移,直到果实的近处,开始收获果实

守顺其大 China Agricultural University 1
China Agricultural University
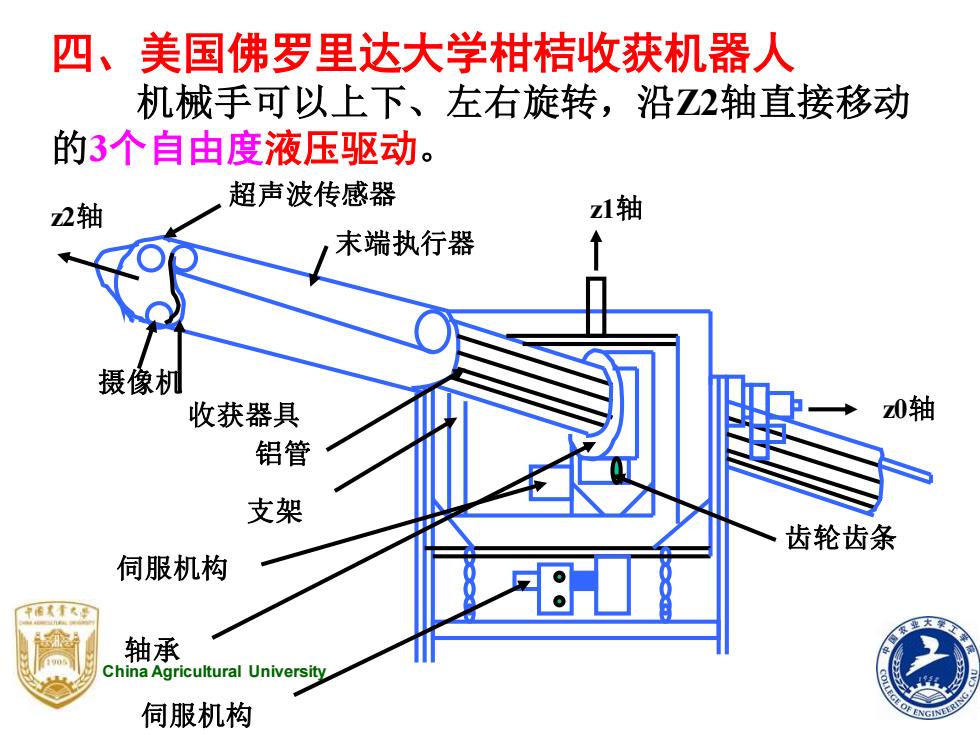
四、美国佛罗里达大学柑桔收获机器人 机械手可以上下、左右旋转,沿Z2轴直接移动 的3个自由度液压驱动。 超声波传感器 2轴 z1轴 末端执行器 摄像机 收获器具 z0轴 铝管 支架 齿轮齿条 伺服机构 个大T大至 轴承 China Agricultural University 伺服机构
China Agricultural University 四、美国佛罗里达大学柑桔收获机器人 机械手可以上下、左右旋转,沿Z2轴直接移动 的3个自由度液压驱动。 收获器具 摄像机 超声波传感器 末端执行器 铝管 支架 伺服机构 轴承 伺服机构 齿轮齿条 z0轴 z2轴 z1轴