1、机械手 采用3DOF极坐标机械手 包括手腕的左右、上下旋转和手腕的直线运动。 个KT大型 China Agricultural University
China Agricultural University 1、机械手 采用3DOF极坐标机械手 包括手腕的左右、上下旋转和手腕的直线运动
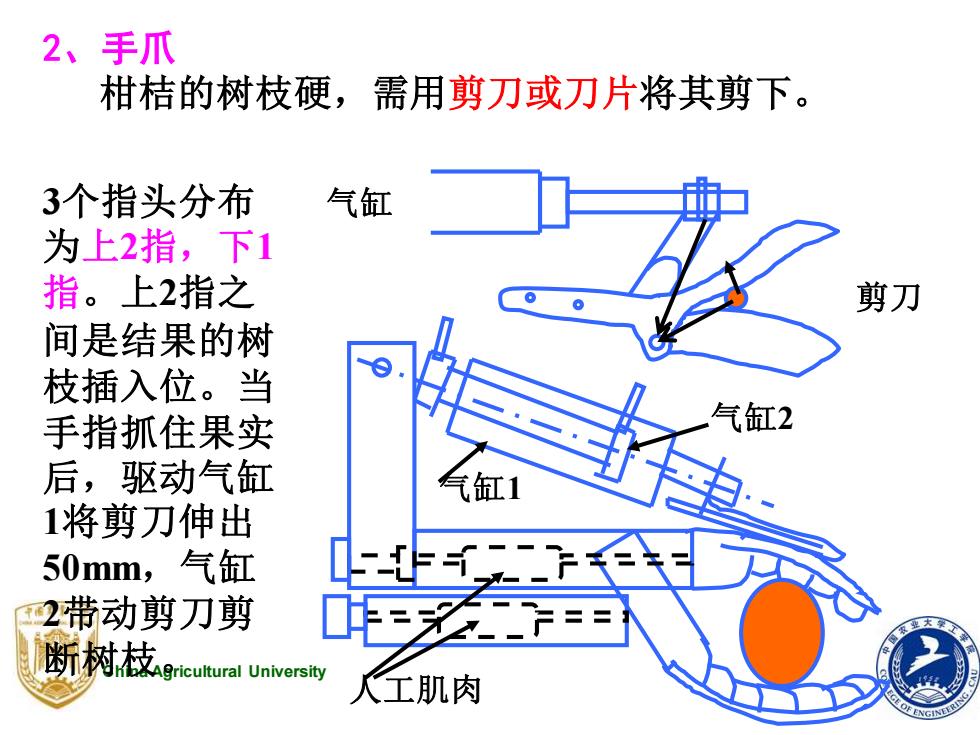
2、手爪 柑桔的树枝硬,需用剪刀或刀片将其剪下。 3个指头分布 气缸 为上2指,下1 指。上2指之 剪刀 间是结果的树 枝插入位。当 手指抓住果实 气缸2 后,驱动气缸 气缸1 1将剪刀伸出 50mm,气缸 2带动剪刀剪 断树枝ricraUnvor 工肌肉
China Agricultural University 2、手爪 柑桔的树枝硬,需用剪刀或刀片将其剪下。 人工肌肉 气缸1 气缸2 气缸 剪刀 3个指头分布 为上2指,下1 指。上2指之 间是结果的树 枝插入位。当 手指抓住果实 后,驱动气缸 1将剪刀伸出 50mm,气缸 2带动剪刀剪 断树枝
手爪具有3个柔性手指,在手掌上安装有剪刀,靠此 剪刀剪断结果的树枝。 手指的指尖通过细软钢丝与人造肌肉相连,肌肉收 缩,钢丝产生拉力使手指弯曲,轻柔地抓住果实。 个而KT大型 China Agricultural University
China Agricultural University 手爪具有3个柔性手指,在手掌上安装有剪刀,靠此 剪刀剪断结果的树枝。 手指的指尖通过细软钢丝与人造肌肉相连,肌肉收 缩,钢丝产生拉力使手指弯曲,轻柔地抓住果实
3、视觉部 靠彩色电视摄像机采用两眼立体视觉和图像反馈 的方法,进行果实的检测. 将摄像机安装在机械手的关节上,由手腕的上下、 左右旋转改变光轴的方向,得到比较宽的视野。 柑桔的收获距离远,图像输入的像素为: 128(水平)×240(垂直) China Agricultural University GINEER
China Agricultural University 3、视觉部 靠彩色电视摄像机采用两眼立体视觉和图像反馈 的方法,进行果实的检测. 将摄像机安装在机械手的关节上,由手腕的上下、 左右旋转改变光轴的方向,得到比较宽的视野。 柑桔的收获距离远,图像输入的像素为: 128(水平)×240(垂直)
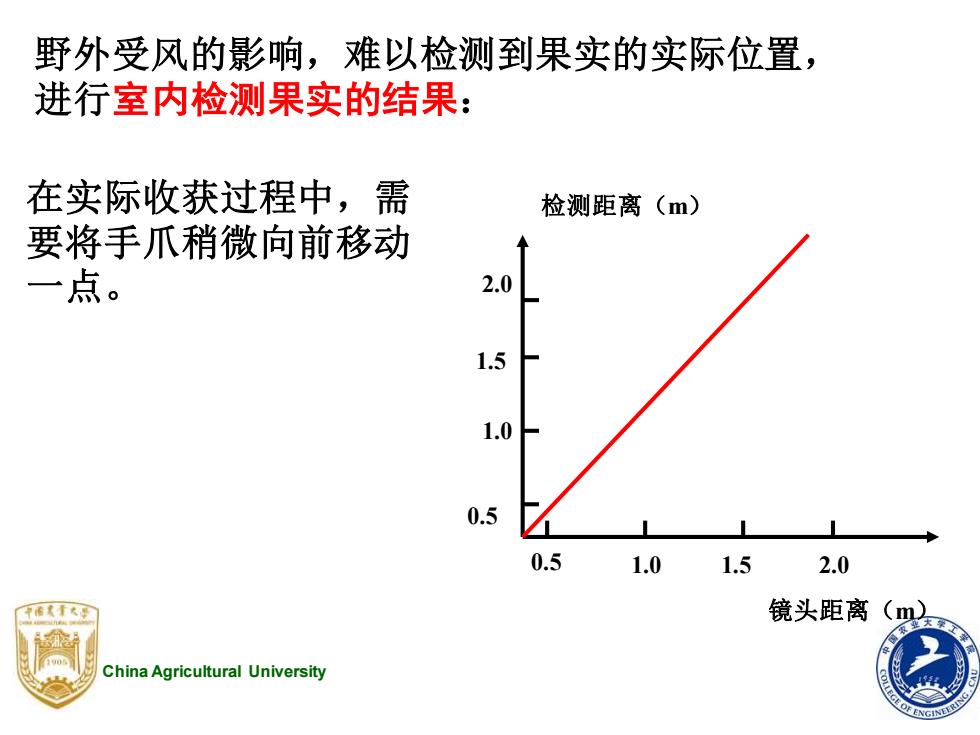
野外受风的影响,难以检测到果实的实际位置, 进行室内检测果实的结果: 在实际收获过程中,需 检测距离(m) 要将手爪稍微向前移动 一点。 2.0 1.5 1.0 0.5 0.5 1.0 1.5 2.0 个KT大型 镜头距离( China Agricultural University
China Agricultural University 野外受风的影响,难以检测到果实的实际位置, 进行室内检测果实的结果: 1.0 1.5 2.0 0.5 0.5 1.0 1.5 2.0 镜头距离(m) 在实际收获过程中,需 检测距离(m) 要将手爪稍微向前移动 一点