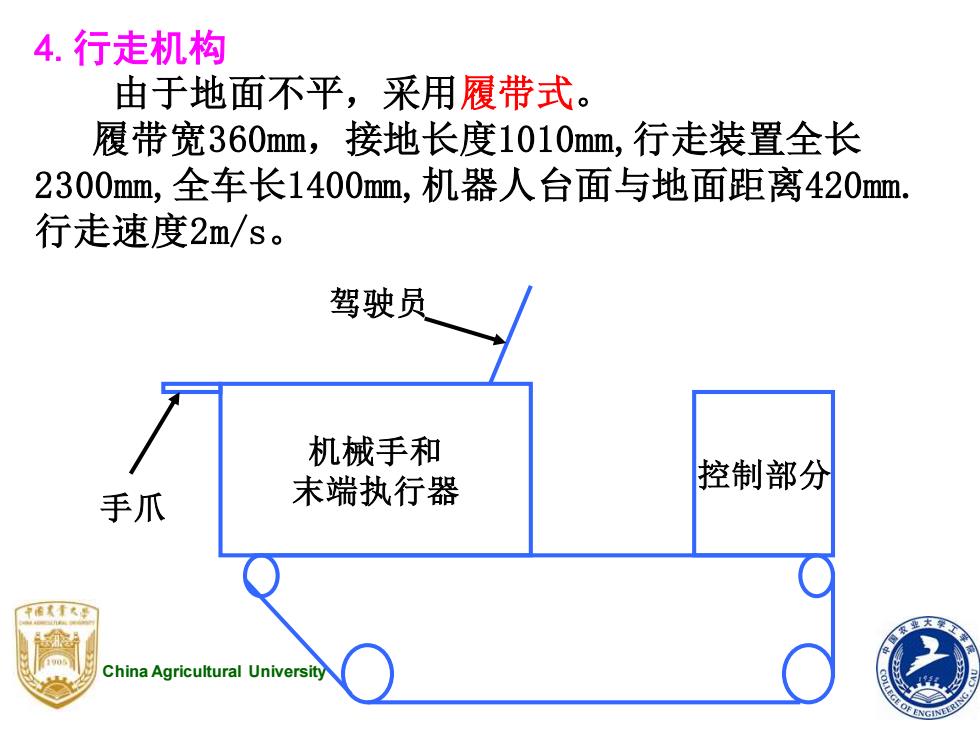
4.行走机构 由于地面不平,采用履带式。 履带宽360mm,接地长度1010mm,行走装置全长 2300mm,全车长1400mm,机器人台面与地面距离420mm. 行走速度2m/s。 驾驶员 机械手和 控制部分 手爪 末端执行器 守大干大 China Agricultural University DF E
China Agricultural University 4.行走机构 由于地面不平,采用履带式。 履带宽360mm,接地长度1010mm,行走装置全长 2300mm,全车长1400mm,机器人台面与地面距离420mm. 行走速度2m/s。 手爪 机械手和 末端执行器 控制部分 驾驶员
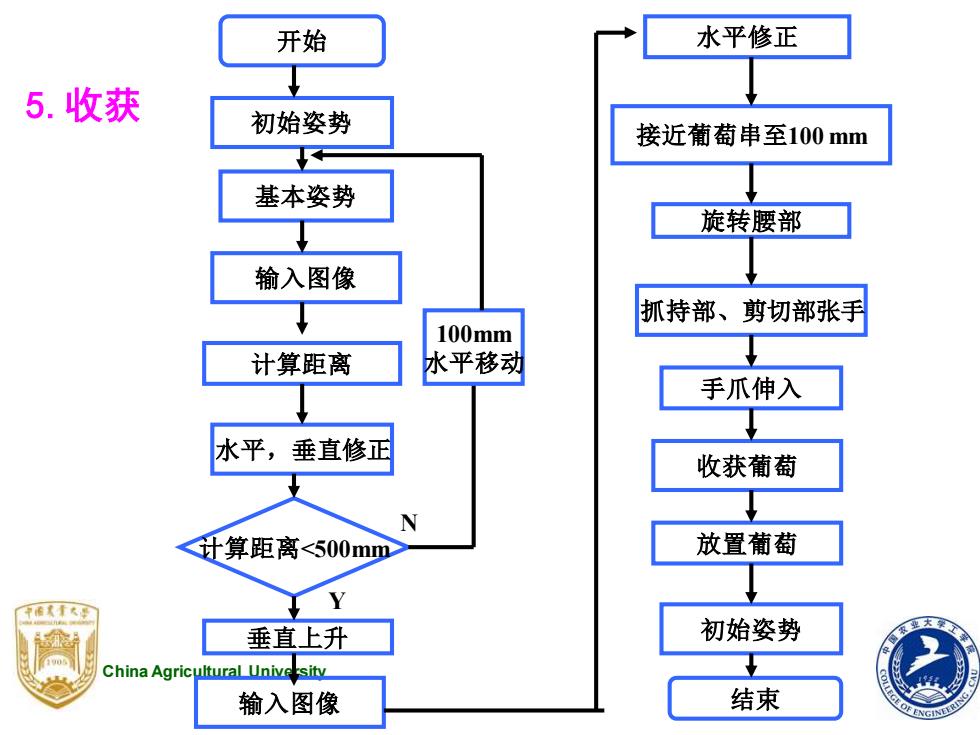
开始 水平修正 5.收获 初始姿势 接近葡萄串至100mm 基本姿势 旋转腰部 输入图像 抓持部、剪切部张手 100mm 计算距离 水平移动 手爪伸入 水平,垂直修正 收获葡萄 N <守算距离<500mm 放置葡萄 干而人「大型 A 大 垂直上升 初始姿势 China Agricultural Unive sity 输入图像 结束
China Agricultural University 5.收获 开始 结束 初始姿势 抓持部、剪切部张手 垂直上升 旋转腰部 输入图像 水平修正 基本姿势 接近葡萄串至100 mm 手爪伸入 输入图像 计算距离 水平,垂直修正 收获葡萄 初始姿势 计算距离<500mm 放置葡萄 100mm 水平移动 N Y
第2节 柑橘收获机器人 宁大丝 China Agricultural University
China Agricultural University 第2节 柑橘收获机器人

一、栽培方式 个KT大型 国农 China Agricultural University
China Agricultural University 一、栽培方式
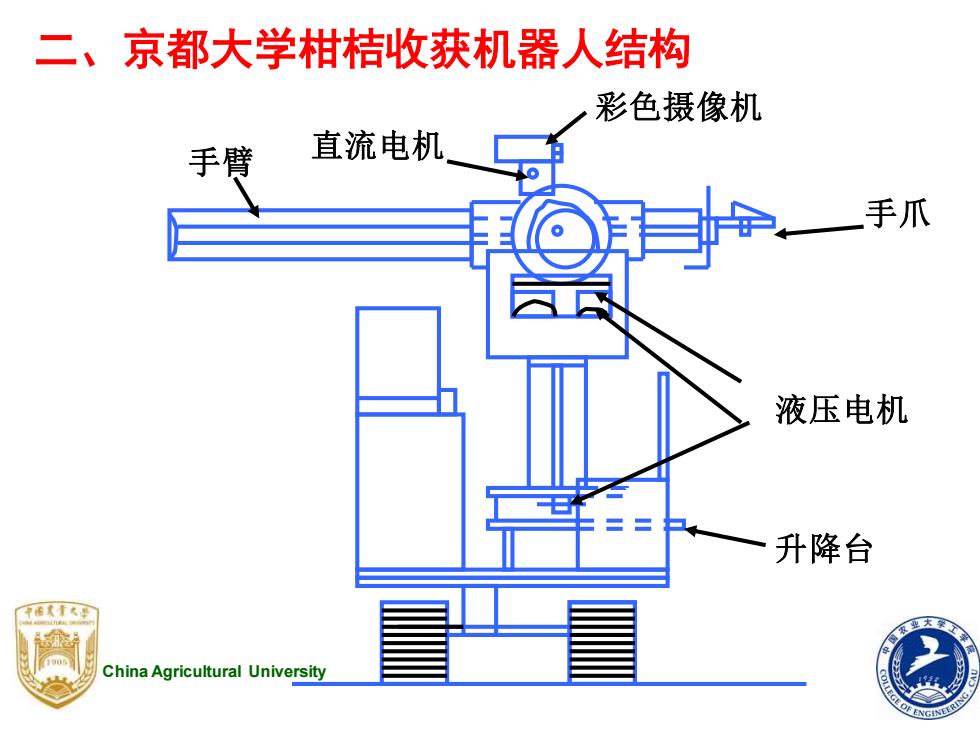
二、京都大学柑桔收获机器人结构 彩色摄像机 手臂 直流电机 手爪 液压电机 升降台 守大T大 China Agricultural University
China Agricultural University 二、京都大学柑桔收获机器人结构 直流电机 彩色摄像机 手爪 液压电机 升降台 手臂