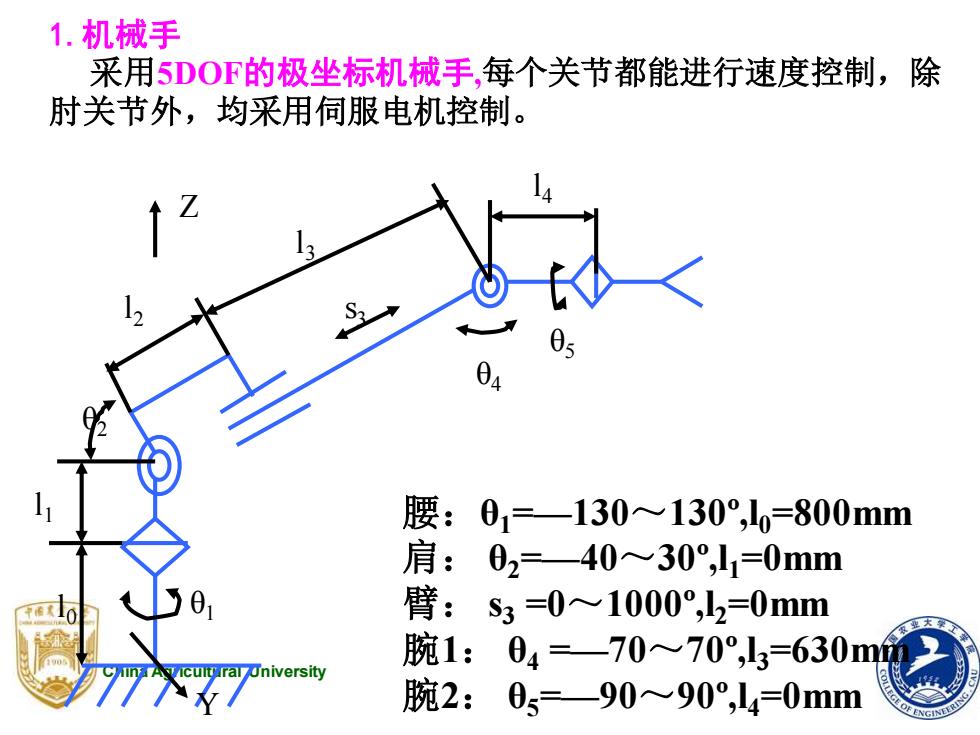
1.机械手 采用5DOF的极坐标机械手,每个关节都能进行速度控制,除 肘关节外,均采用伺服电机控制。 腰:01=-130130°,l=800mm 肩:02=—40≈30°,1=0mm 臂:S3=0≈1000,2=0mm 腕1:04=—7070°,l3=630m4 腕2:05=—90~90°,l4=0mm
China Agricultural University 1.机械手 采用5DOF的极坐标机械手,每个关节都能进行速度控制,除 肘关节外,均采用伺服电机控制。 l4 l0 l1 l2 l3 θ2 s3 θ1 θ4 θ5 Y Z 腰:θ1=—130~130º,l0=800mm 肩: θ2=—40~30º,l1=0mm 臂: s3 =0~1000º,l2=0mm 腕1: θ4 =—70~70º,l3=630mm 腕2: θ5=—90~90º,l4=0mm

由于葡萄生长在同一水平面上,只需在水平方向上 控制机械手。 通过计算各个关节的角速度,就可以控制肩、臂、肘。 h China Agricultural University Vh一手爪的水平移动速
China Agricultural University 由于葡萄生长在同一水平面上,只需在水平方向上 控制机械手。 通过计算各个关节的角速度,就可以控制肩、臂、肘。 s3 θ4 θ2 Z X a vh h Vh—手爪的水平移动速度

2.末端执行器 葡萄果串是一串一串的,果实表面有一层粉,具有 保护作用,收获时不能碰,只需剪断果串蒂部。 果串的重量约500克,手爪的把持力设为10N 果串蒂的切断面积30mm2,手爪的剪切力为100N 把持部和切断部的张开角分别为0~46°和一17~46°. 动作: 从全开的46到合拢的0°,抓持部与切断部同步,当 抓持部完全合拢后,切断部进入切断动作, 关闭到-17. 个而人行大至 China Agricultural University
China Agricultural University 2.末端执行器 葡萄果串是一串一串的,果实表面有一层粉,具有 保护作用,收获时不能碰,只需剪断果串蒂部。 果串的重量约500克,手爪的把持力设为10N 果串蒂的切断面积30mm2,手爪的剪切力为100N 把持部和切断部的张开角分别为0~46º和—17~46º. 动作: 从全开的46º到合拢的0º ,抓持部与切断部同步,当 抓持部完全合拢后,切断部进入切断动作, 关闭到-17º
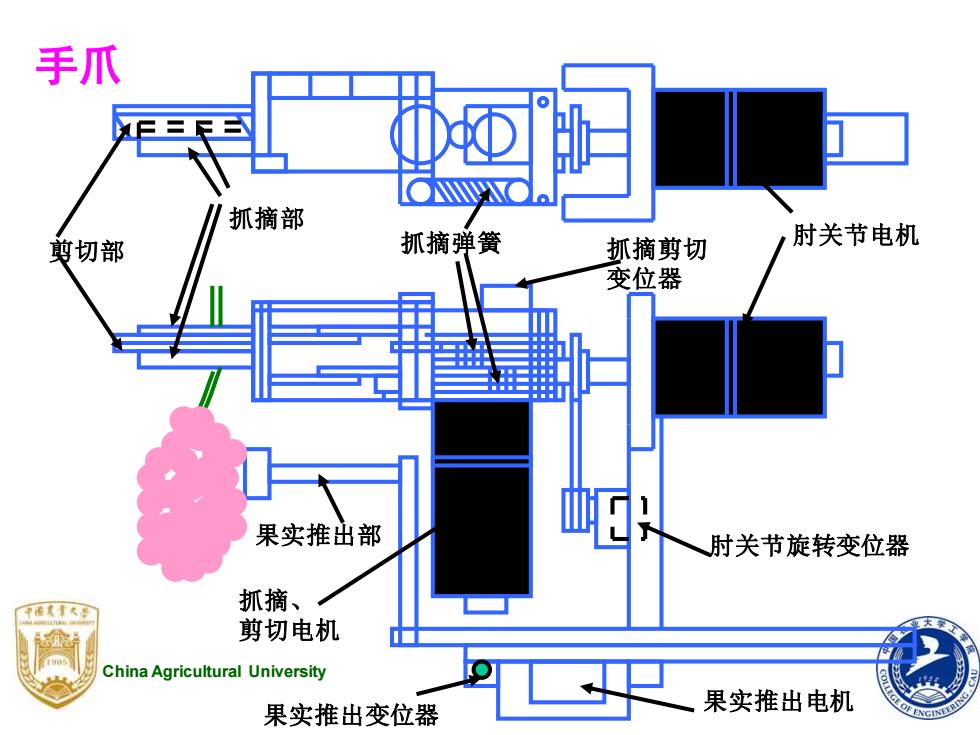
手爪 抓摘部 剪切部 抓摘弹簧 抓摘剪切 肘关节电机 变位器 果实推出部 时关节旋转变位器 守大T大 抓摘、 剪切电机 China Agricultural University 果实推出变位器 果实推出电机
China Agricultural University 手爪 肘关节电机 抓摘、 剪切电机 果实推出电机 肘关节旋转变位器 抓摘剪切 变位器 果实推出变位器 抓摘部 剪切部 抓摘弹簧 果实推出部
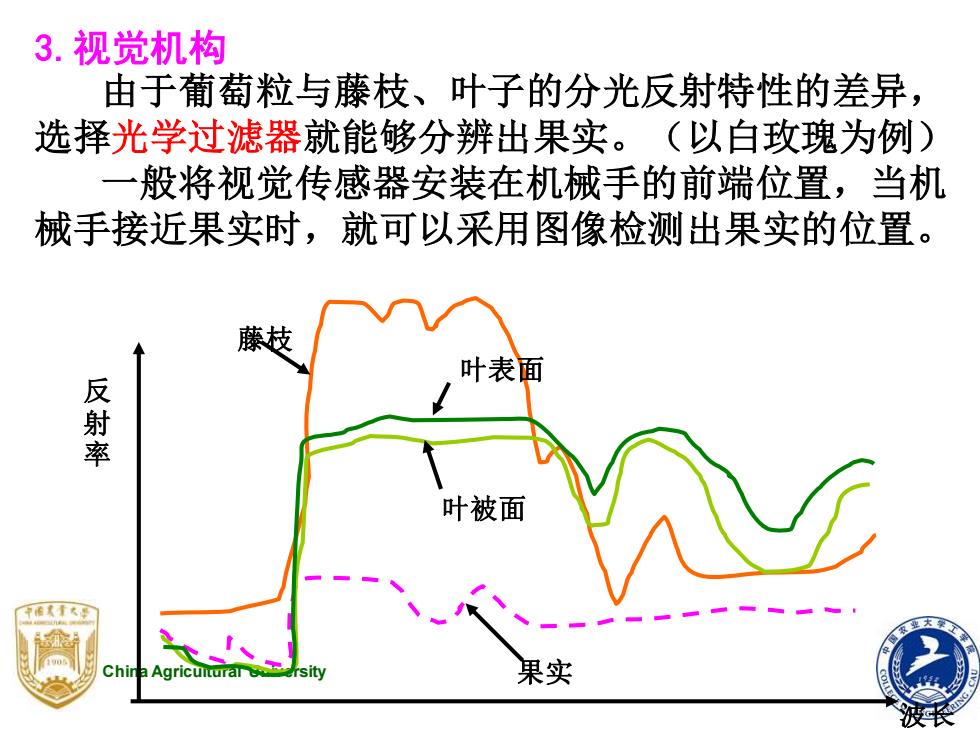
3.视觉机构 由于葡萄粒与藤枝、叶子的分光反射特性的差异, 选择光学过滤器就能够分辨出果实。(以白玫瑰为例) 一般将视觉传感器安装在机械手的前端位置,当机 械手接近果实时,就可以采用图像检测出果实的位置。 藤枝 叶表面 反射率 叶被面 个传大打大 Agricultural rsity 果实
China Agricultural University 3.视觉机构 由于葡萄粒与藤枝、叶子的分光反射特性的差异, 选择光学过滤器就能够分辨出果实。(以白玫瑰为例) 一般将视觉传感器安装在机械手的前端位置,当机 械手接近果实时,就可以采用图像检测出果实的位置。 叶表面 叶被面 果实 藤枝 波长 反 射 率