德仓创机器人 Dechuang Robot 8.机器人导航与路径规划 定位:绝对定位 地图匹配:机器人运用各种传感器(如超声波、激光雷达、 摄像机)探测环境来创建其所处的局部环境地图。然后将此 主动灯塔 信标 路标定位 positlon Position Updale 地图匹配 (Estimation?) 绝对定位 Encoder Prediction of Position matched 卫星导航 马尔可夫 obeervalons YES 概率法 蒙特卡罗 Map I predictad posltion data base Matching 卡尔曼滤波 raw sersor da减aor extracfed feat阳s Observation
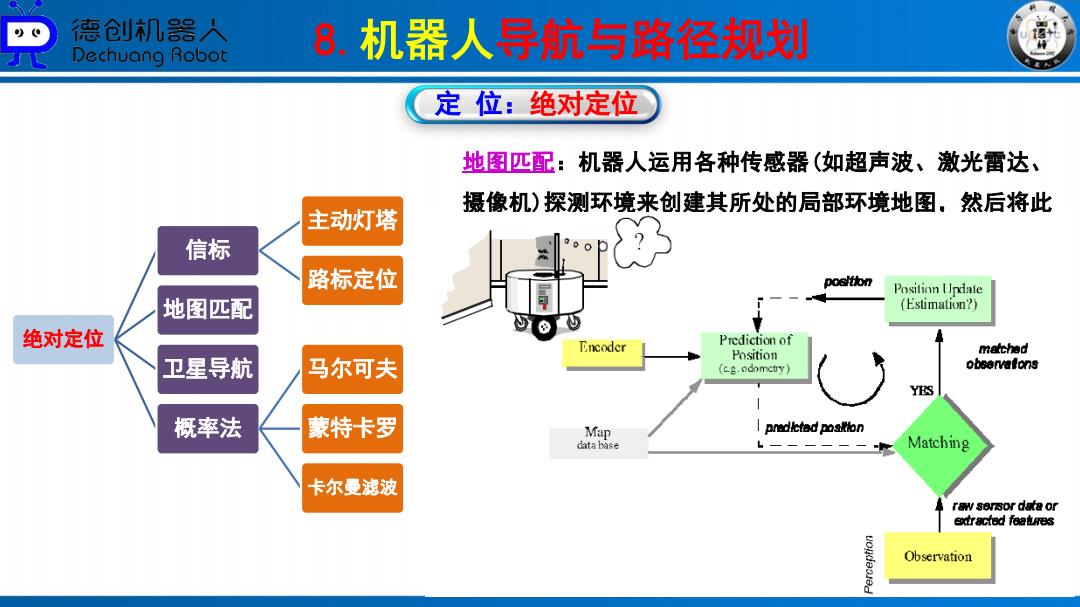
8.机器人导航与路径规划 17 定 位:绝对定位 地图匹配:机器人运用各种传感器(如超声波、激光雷达、 摄像机)探测环境来创建其所处的局部环境地图,然后将此 局部地图与存储在机器人中的全局地图进行匹配。如果匹配 成功,机器人就计算出自身在该环境中的位置。 绝对定位 信标 主动灯塔 路标定位 地图匹配 卫星导航 概率法 马尔可夫 蒙特卡罗 卡尔曼滤波
y0 德仓创机器人 Dechuang Robot 8.机器人导航与路径规划 定位:绝对定位 卫星导航(GP$):适用于室外移动机器人的一种全局定位系统,以空间卫星为基础的高精度导航与定位 系统,是由美国国防部批准研制,为海、陆、空三军服务,该系统由三大部分构成:GPS卫星星座(空间 部分)、地面监控部分(控制部分)和GPS信号接收机(用户部分)。GS系统能够实施全球性、全天候、实 时连续的三维导航定位服务,定位精度较低。 0053 多普勒定位法 伪距定位法 星等舟星 载波相位定位法 单点定位 差分GPS 18
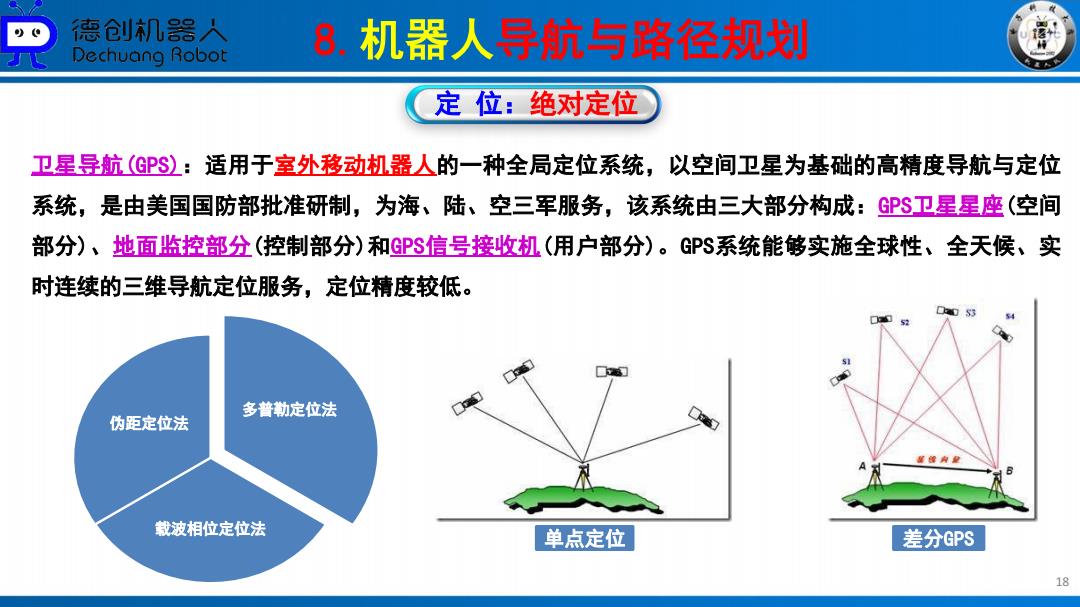
8.机器人导航与路径规划 18 定 位:绝对定位 卫星导航(GPS):适用于室外移动机器人的一种全局定位系统,以空间卫星为基础的高精度导航与定位 系统,是由美国国防部批准研制,为海、陆、空三军服务,该系统由三大部分构成:GPS卫星星座(空间 部分)、地面监控部分(控制部分)和GPS信号接收机(用户部分)。GPS系统能够实施全球性、全天候、实 时连续的三维导航定位服务,定位精度较低。 多普勒定位法 载波相位定位法 伪距定位法 单点定位 差分GPS
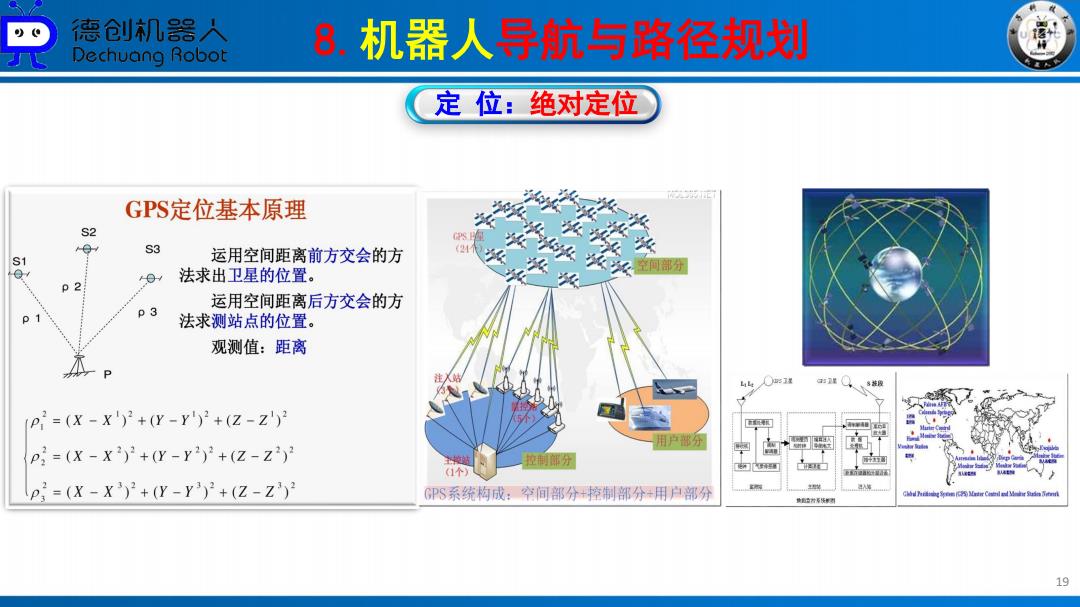
德仓创机器人 Dechuang Robot 8.机器人导航与路径规划 定位:绝对定位 GPS定位基本原理 S2 S3 S1 运用空间距离前方交会的方 部分 Q 0 法求出卫星的位置。 运用空间距离后方交会的方 P 1 p3 法求测站点的位置。 观测值:距离 p2=(x-X')2+(Y-y2+(z-Z p=(X-X2)2+Y-y2)2+(z-z2)2 (1个) p3=(X-X')2+(Y-y')2+(Z-Z2 GPS系统构成:空间部分+控制部分+用户部分 19
8.机器人导航与路径规划 19 定 位:绝对定位

德仓创机器人 Dechuang Robot 8.机器人导航与路径规划 定位:绝对定位 © 高幅蜜GNS5别向捷发 与nav © 厘米级GPS模块 智能驾驶 以密片+算法”为心,领先的抗汗扰性 提供高消鹰的位置、速度和姿态基准 为智能泊车、立体智能交通提供可靠阅测量结果 20
8.机器人导航与路径规划 20 定 位:绝对定位 厘米级GPS模块
德仓创机器人 Dechuang Robot 8.机器人导航与路径规划 定位:绝对定位 路标定位布置困难、成本高、应用场景有限,适合于结构化场景;卫星导航精度低、仅适合于室 外环境。概率绝对定位是基于贝吐斯概率定理,以机器人上携带的里程计、测距传感器获得数据 为验前位置信息,递推估计机器人验后位置(当前)。基本思想是通过对环境的不断测量与迭代 来不断提高位置估计的可信度,最终达到机器人定位精度要求。 概率绝 贝叶斯概率定理 定位 设A1,A2,,An是两两互斥的事件,且P(Ai)>0,i=1,2,.,n,另有一事件B,它总是与A1,A2,,An之 一同时发生,则: 贝叶斯概率定理揭示的是在观察到事件B已发生的条件下,寻找导致B发生的每个原因的概率。 机器人概率定位 事件B:传感器数据 机器人历史位置 最大概率对应的机器人位置 21
8.机器人导航与路径规划 21 定 位:绝对定位 概 率 绝 对 定 位 路标定位布置困难、成本高、应用场景有限,适合于结构化场景;卫星导航精度低、仅适合于室 外环境。概率绝对定位是基于贝叶斯概率定理,以机器人上携带的里程计、测距传感器获得数据 为验前位置信息,递推估计机器人验后位置(当前)。基本思想是通过对环境的不断测量与迭代 来不断提高位置估计的可信度,最终达到机器人定位精度要求。 贝叶斯概率定理 设A1,A2,…,An是两两互斥的事件,且P(Ai)>0,i=1,2,…,n, 另有一事件B,它总是与A1,A2,…,An 之 一同时发生,则: 贝叶斯概率定理揭示的是在观察到事件B已发生的条件下,寻找导致B发生的每个原因的概率。 机器人概率定位 事件B:传感器数据 机器人历史位置 最大概率对应的机器人位置