The variable-separating method: A method that can be applied to linear partial differential equations, especially those with constant coefficients in the equation Assume the displacement can be expressed as a product of a function of x and a function of t u(x,t)=v(x)z(t) Change PDE to ODE The above expression is an assumption! 目 土茅2粗季院
The variable-separating method: • A method that can be applied to linear partial differential equations, especially those with constant coefficients in the equation • Assume the displacement can be expressed as a product of a function of x and a function of t • Change PDE to ODE • The above expression is an assumption! u x t , xzt
The Generalized SDOF: The equation of motion mz++kz p(t) The analysis method for normal SDOF can be readily applied to the above equation. The key step here is to determine the generalized mass, damping,stiffness and excitation for a given system. Note:the generalized properties are associated with the generalized displacement z(t) 闺 土本程李悦
The Generalized SDOF: • The equation of motion • The analysis method for normal SDOF can be readily applied to the above equation. • The key step here is to determine the generalized mass, damping, stiffness and excitation for a given system. Note: the generalized properties are associated with the generalized displacement z(t) mz cz kz p t ( )
Rigid-body Assemblages EOM is formulated for an assemblage of rigid bodies with distributed mass supported by discrete springs and dampers subjected to time-varing forces. Inertial forces of rigid-body assemblages For each rigid body,inertial forces are distributed forces, acting on each material point,their resultant can be described by (1)A force applied to the centre of mass of the body, proportional to acceleration vector and total mass M=∫dm (2)A couple,proportional to angular acceleration and the moment of inertia J of the rigid body J=∫(x2+y2)dm 目 主京2相季院
Rigid-body Assemblages • EOM is formulated for an assemblage of rigid bodies with distributed mass supported by discrete springs and dampers subjected to time-varing forces. • Inertial forces of rigid-body assemblages For each rigid body, inertial forces are distributed forces, acting on each material point, their resultant can be described by (1) A force applied to the centre of mass of the body, proportional to acceleration vector and total mass (2) A couple, proportional to angular acceleration and the moment of inertia J of the rigid body M dm 2 2 J x y dm
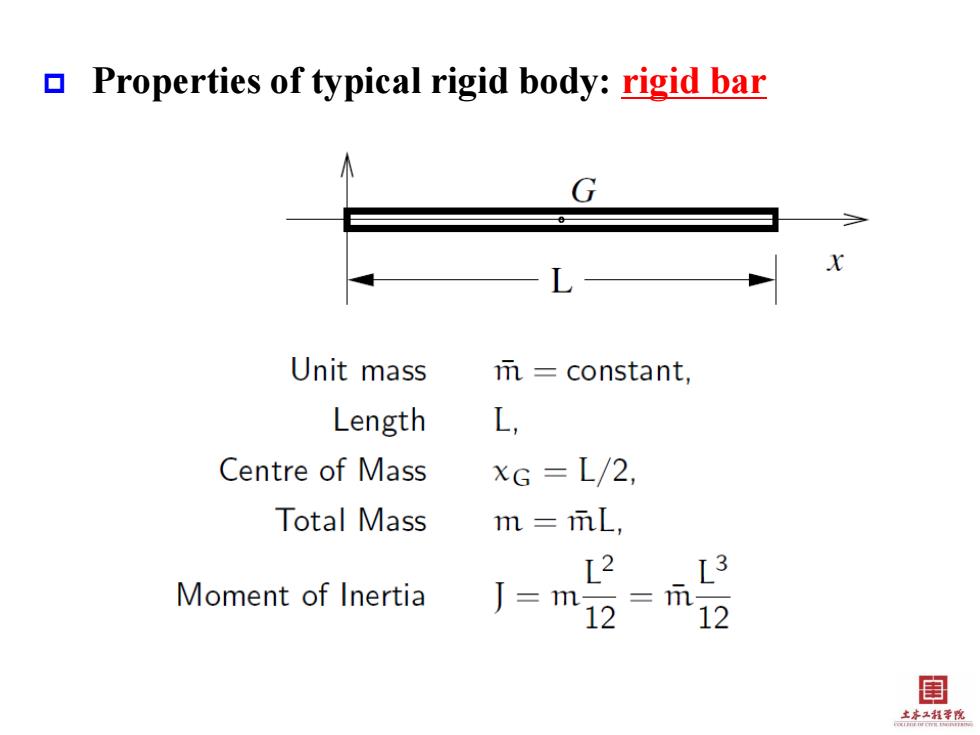
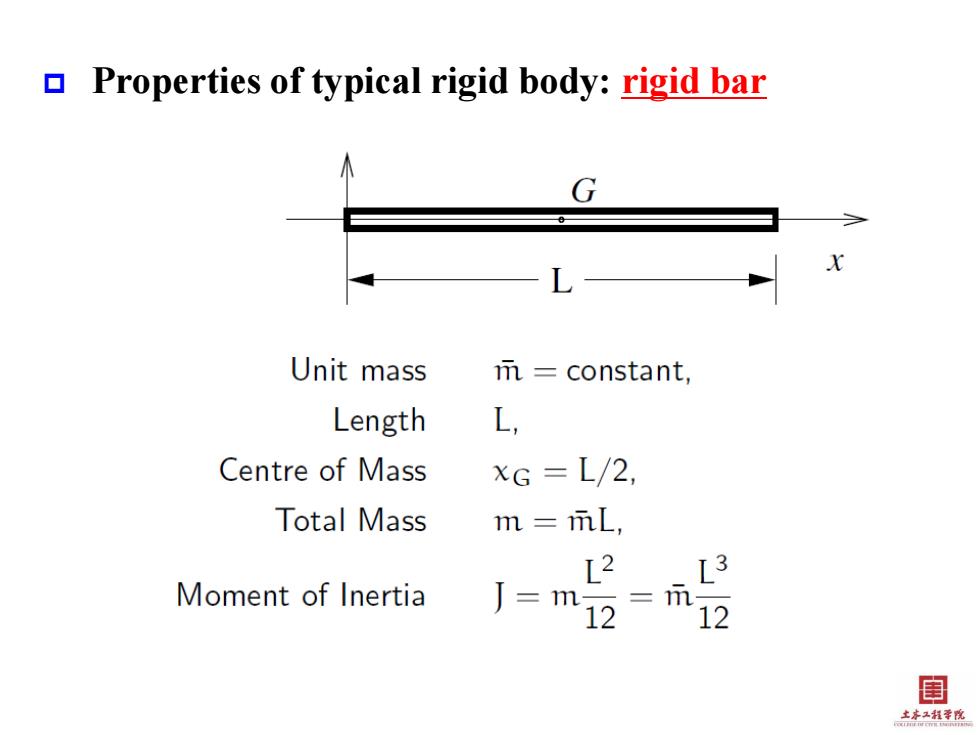
Properties of typical rigid body:rigid bar Unit mass m=constant, Length L, Centre of Mass xG L/2, Total Mass m mL, L2 L3 Moment of Inertia J=12 12 目 土本程李悦
Properties of typical rigid body: rigid bar
Properties of typical rigid body:rigid bar Unit mass m=constant, Length L, Centre of Mass xG L/2, Total Mass m =mL, L2 Moment of Inertia J=m12 =m 12 目 土水2程学院
Properties of typical rigid body: rigid bar