
解此方程得: x=xo coS @0t, 显然,这时A和B的运动就 是自由的无耦合的单摆的 X2=xo cos 0t, 运动,并且A和B的振幅、 相位都相等,两者间距也 式中 保持不变。这是耦合摆的 一种特殊运动状态,亦 00= 即耦合系统的一种简正模: 系统中每一个质点均以相 同频率和相位作简谐振动。 即为单摆作小角度摆动 时的角频率
解此方程得: 即为单摆作小角度摆动 时的角频率。 l g ω 0 = ,cos ,cos 02 0 01 0 txx txx ω ω = = 式中 显然,这时 A 和 B的运动就 是自由的无耦合的单摆的 运动,并且 A 和 B的振幅、 相位都相等,两者间距也 保持不变。这是耦合摆 的 一种特殊运动状态,亦 即耦合系统的一种简正模: 系统中每一个质点均以 相 同频率和相位 作简谐振动
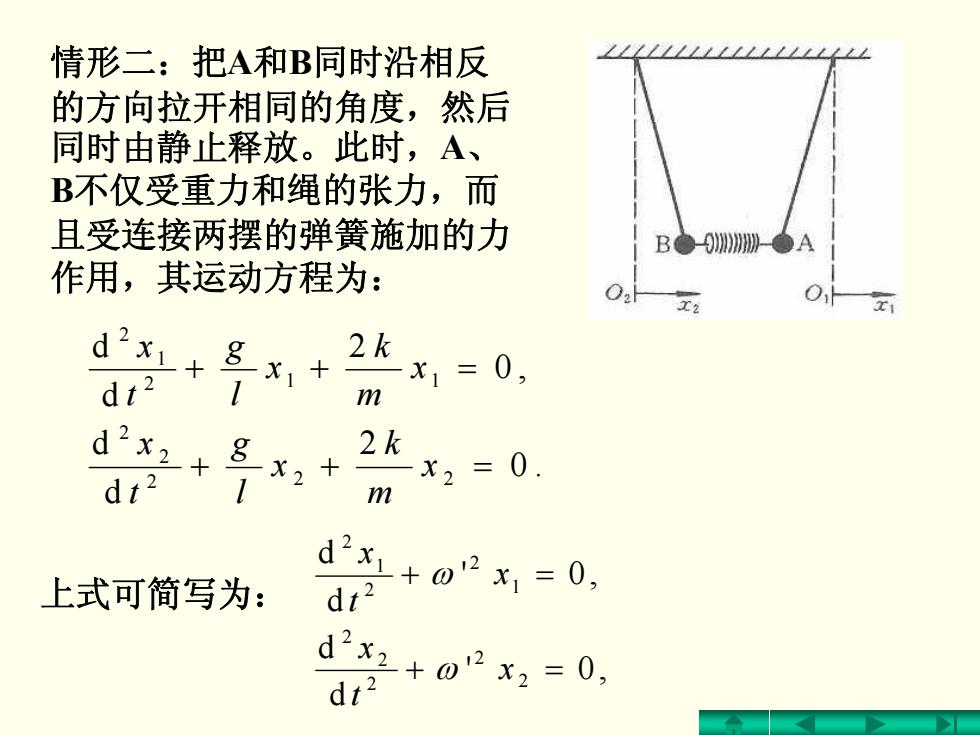
情形二:把A和B同时沿相反 的方向拉开相同的角度,然后 同时由静止释放。此时,A、 B不仅受重力和绳的张力,而 且受连接两摆的弹簧施加的力 B●》》-●A 作用,其运动方程为: 02 工2 d2x1+8x1+ 2k dt2 1=0, m d2x2 2k dt2 +gx2+ -x2=0 m 上式可简写为: dt2 x1=0, d2x2+02x2=0, dt2
情形二:把A和B同时沿相反 的方向拉开相同的角度,然后 同时由静止释放。此时,A、 B不仅受重力和绳的张力,而 且受连接两摆的弹簧施加的力 作用,其运动方程为: .0 2 d d ,0 2 dd 2 2 2 2 2 2 1 1 1 2 =++ =++ x m k x l g t x x m k x l g t x 上式可简写为: ,0' dd ,0' dd 2 2 2 2 2 1 2 2 1 2 =+ =+ x t x x t x ω ω
。- 式中 利用初始条件t=0时, ==x及班=血=0 dt dt 得x1=-x0c0s0't, X2=xo coS @'t. 由此可见,在这种情况下,A、B仍以相同频率ω作 简谐振动,但由于弹簧的作用,使频率o>@,并且 在运动中A和B之间的相位差始终为π
由此可见,在这种情况下, A 、 B仍以相同频率ω′ 作 简谐振动,但由于弹簧的作用,使频率ω′ > ω0 ,并且 在运动中 A 和 B之间的相位差始终为 π 。 .'cos ,'cos 02 1 0 txx txx ω ω = = − 2/1 ) 2 (' m k l g ω += t = 0 及 0, d d d d , 21 0201 ===−= t x t x xxxx 式中 利用初始条件 时, 得
综合情形一和情形二,可得以下结论: 具有两个自由度的系统可以有两种简正模,即 低频模式:X1=x2,01=00= 此时,两质点作同相位的简谐振动,振动频率相同 且等于无耦合时自由振动的频率。 此时,两质点作频率相同但相位相反的简谐振动,但 振动频率将大于无耦合时自由振动的频率
综合情形一和情形二,可得以下结论: 具有两个自由度的系统可以有两种简正模,即 低频模式: 此时,两质点作同相位的简谐振动,振动频率相同 且等于无耦合时自由振动的频率。 此时,两质点作频率相同但相位相反的简谐振动,但 振动频率将大于无耦合时自由振动的频率。 高频模式: l g xx , ωω 0l21 === 2/1 1 h2 ) 2 (', m k l g xx ωω +==−=