
细台形z幸院 antai Institute of Technology 求解概念 原城台好火维年院 Reachable workspace ◆手臂可以用一種以上的姿態到達的位置 7
7 求解概念

细台形z幸院 antai Institute of Technology 求解概念 原城台好火维年院 Reachable workspace ◆手臂可以用一種以上的姿態到達的位置 Dexterous workspace ◆手臂可以用任何的姿態到達的位置 8
8 求解概念
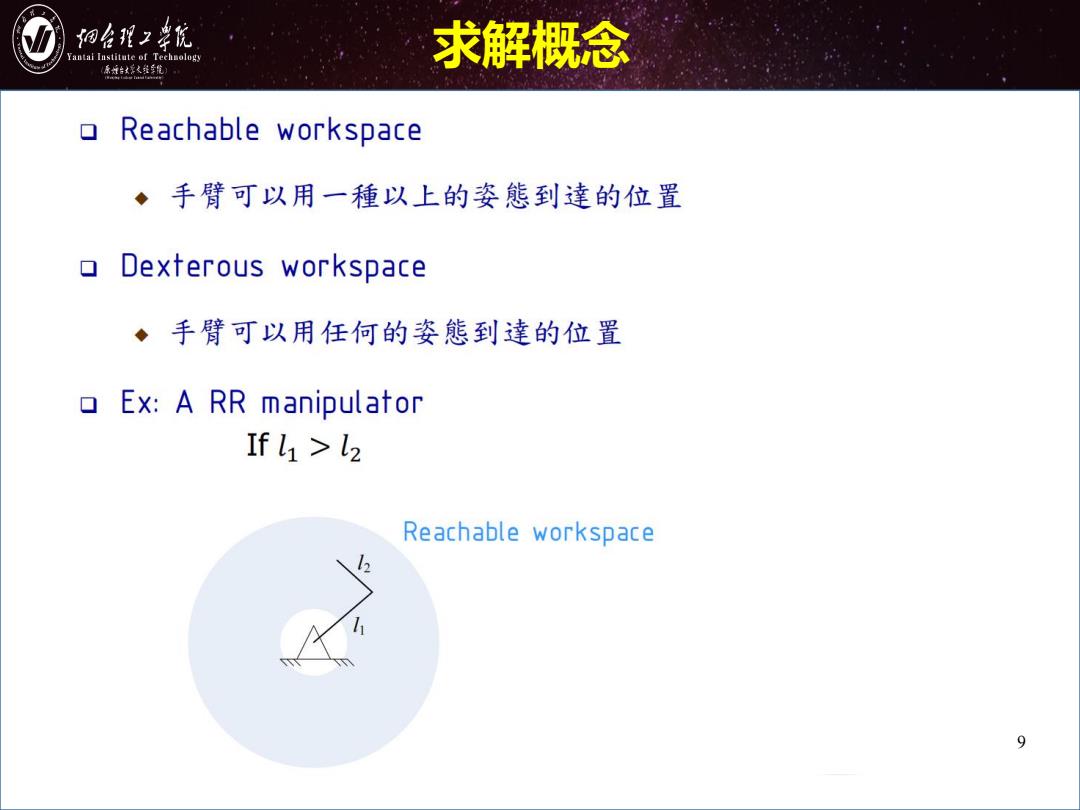
阳台程2幸优 Yantai Institute of Technology 求解概念 原城台好火维年院 Reachable workspace ◆手臂可以用一種以上的姿態到達的位置 口Dexterous workspace ◆手臂可以用任何的姿態到達的位置 Ex:A RR manipulator If l l2 Reachable workspace 9
9 求解概念

阳台程2幸优 antai Institute of Technology 求解概念 原城台好火维年能 Reachable workspace ◆手臂可以用一種以上的姿態到達的位置 口Dexterous workspace ·手臂可以用任何的姿態到達的位置 Ex:A RR manipulator If l l2 If l l2 Reachable workspace Dexterous workspace 10
10 求解概念
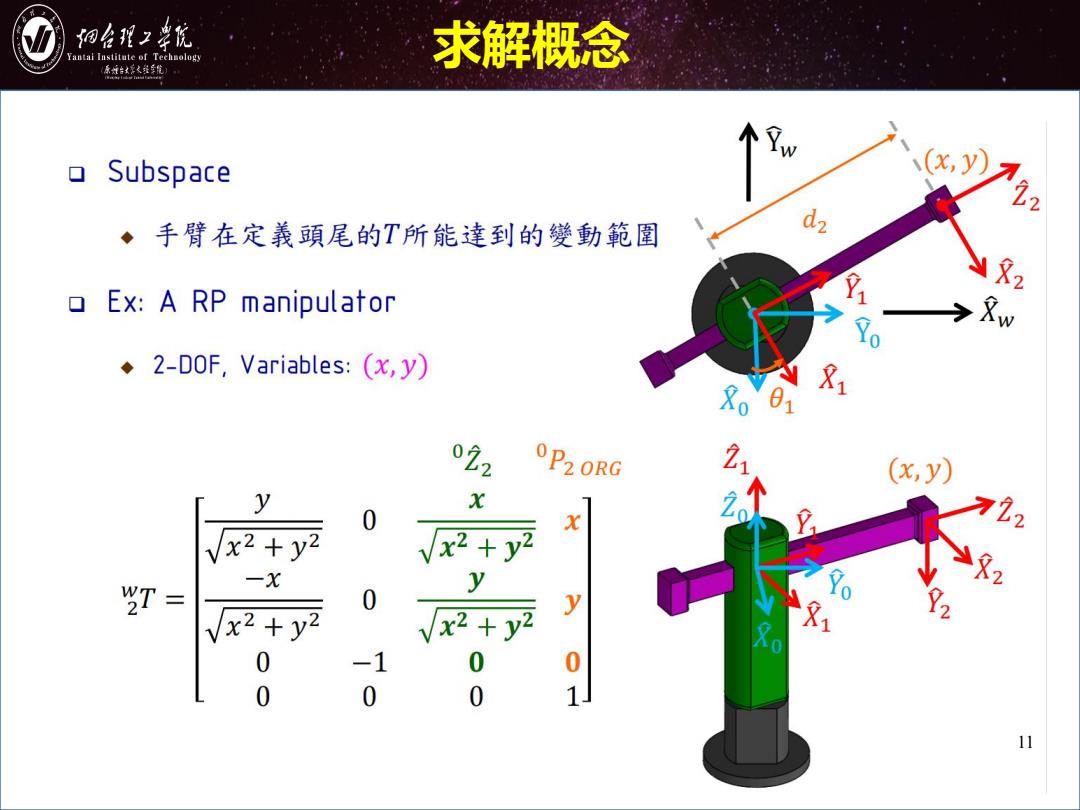
细台程2幸优 Yantai Institute of Technology 求解概念 原城台好火维年馆 Subspace ◆手臂在定義頭尾的T所能達到的變動範圍 Ex:A RP manipulator Xw 2-DOF,Variables:(x,y) 8001 81 0P2ORG (x,y) y X 0 X 22 x2+y2 √x2 y2 X2 WT= 0 Vx2+y2 vx2 y2 y 00 -1 0 0 0 0 1」 11
11 求解概念