
3)多电机拖动 随着电动机品 种的丰富、价格的 降低、机械特性的 多样化,在机电传 动领域,开始逐步 普及多电机拖动方 案。 摇臂钻床 所谓多电机拖动方案,是指在大型、复杂的生产机械上 同一台设备的每一个运动部件都由一台专门的电动机进行拖动 且电动机的功率、机械特性以及安装位置可以进行有针对性的、 个性化的配置,以充分满足生产王艺的实际需求
吉林大学珠海学院机电工程系 (3)多电机拖动 所谓多电机拖动方案,是指在大型、复杂的生产机械上, 同一台设备的每一个运动部件都由一台专门的电动机进行拖动, 且电动机的功率、机械特性以及安装位置可以进行有针对性的、 个性化的配置,以充分满足生产工艺的实际需求。 随着电动机品 种的丰富、价格的 降低、机械特性的 多样化,在机电传 动领域,开始逐步 普及多电机拖动方 案。 摇臂钻床
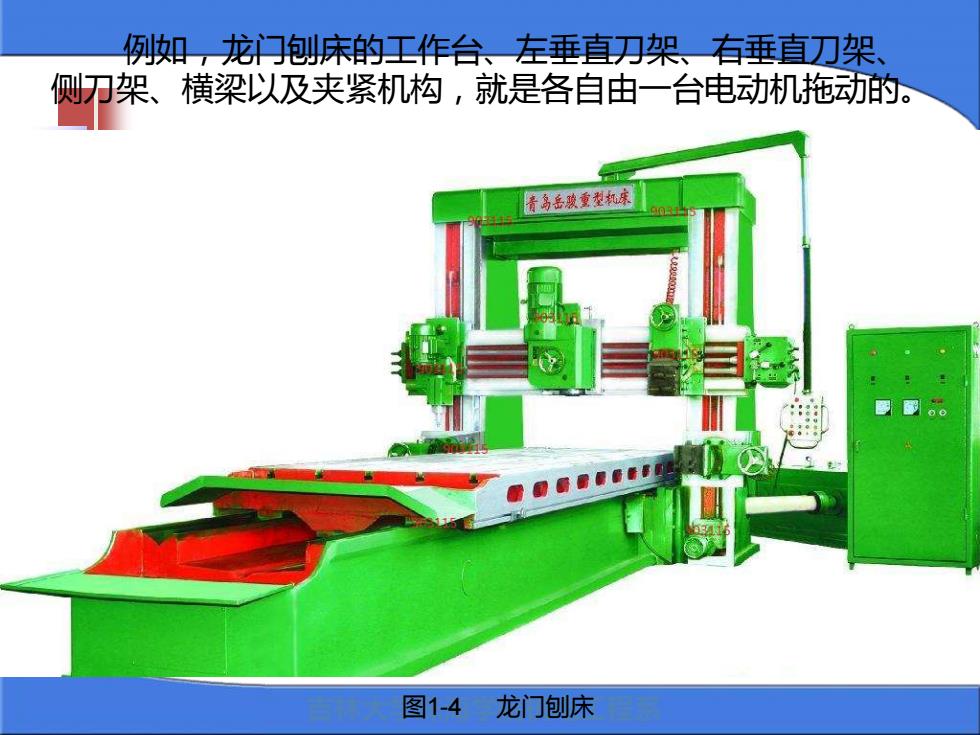
例如,龙门包刨床的工作台、左垂直刃架、有垂直刀架 侧刀架、横梁以及夹紧机构,就是各自由一台电动机拖动的。 情易岳骏重型丸床 图14龙门刨床
吉林大学珠海学院机电工程系 例如,龙门刨床的工作台、左垂直刀架、右垂直刀架、 侧刀架、横梁以及夹紧机构,就是各自由一台电动机拖动的。 图1-4 龙门刨床

2电气控制系统的发展 (1)继电器一接触器控制系统 停止 启动 继电器 接触器控制 系统出现于 20世纪初期。 该系统通过 顺点动 逆点动 继电器和接 触器等低压 控制器件, 实现对控制 对象的起动、 停车以及有 级调速等控 制。 图1-5继电器接触器控制系统
吉林大学珠海学院机电工程系 2.电气控制系统的发展 (1)继电器—接触器控制系统 继电器— 接触器控制 系统出现于 20世纪初期。 该系统通过 继电器和接 触器等低压 控制器件, 实现对控制 对象的起动、 停车以及有 级调速等控 制。 图1-5 继电器—接触器控制系统
继电器一接触器控制系统采用的是“硬逻辑“控制 在生产工艺要求复杂多变的场合,难以实现控制关系的 随机应变”,因此,现在已经被可编程序控制器控制系 玩取代。 但在相对简单的电气控制系统中,继电器一接触器仍然 占据着主导地位。同时,在可编程序控制器控制系统中,继 电器、接触器依然作为控制系统的执行器件在大量使用。 (2)可编程序控制器控制系统 得益于微电子技术和计算机技术的发展,可编程序控制 器采用的是“软逻辑”控制,当生产机械的控制关系发生变 化时,只需更改控制程序(即对控制软件重新编程,很容易 做到),就可以实现新的控制要求,而不需要对硬件做太多 的调整
吉林大学珠海学院机电工程系 继电器—接触器控制系统采用的是“硬逻辑”控制, 在生产工艺要求复杂多变的场合,难以实现控制关系的 “随机应变”,因此,现在已经被可编程序控制器控制系 统取代。 但在相对简单的电气控制系统中,继电器—接触器仍然 占据着主导地位。同时,在可编程序控制器控制系统中,继 电器、接触器依然作为控制系统的执行器件在大量使用。 (2)可编程序控制器控制系统 得益于微电子技术和计算机技术的发展,可编程序控制 器采用的是“软逻辑”控制,当生产机械的控制关系发生变 化时,只需更改控制程序(即对控制软件重新编程,很容易 做到),就可以实现新的控制要求,而不需要对硬件做太多 的调整

903于52 2-6035-g 593餐 90315 可编程序控制器(Programmable Logic Controller,PLC) 因此,在生产工艺要求复杂多变的场合,可编程序控制 器可以大显身手,并已经成为机电传动控制系统的主流控制 器件
吉林大学珠海学院机电工程系 因此,在生产工艺要求复杂多变的场合,可编程序控制 器可以大显身手,并已经成为机电传动控制系统的主流控制 器件。 可编程序控制器(Programmable Logic Controller,PLC)