教学内容 批注 功能完备、灵活性、通用性好。特别是计算机的计算能力特别强。在这个 时候,有人就会想到把继电器系统和计算机系统二合一,计算机系统编程 容易、计算速度快,就内置在继电器系统上,而继电器系统操作方便就负 责外围的设备。提出这种设想的是1968年美国的通用汽车公司,当时主要 是为它生产汽车而考虑的,但是他们对计算机不是很了解。到了1969年 美国数字设备公司研制出了世界上第一台PLC,型号称为PDP14。图1-2是 德国西门子公司的S7-200。 图11继电器控制系统 存储器卡模式选择器 1电位器 SIEMENS ☐PPI连接 状态指示 1/D0状态指示 图1-2S7-200 (1)模式选择器。用于手动选择操作模式: STOP 停机模式:不执行程序 TERM 运行程序:可以通过编程器进行读/写访问 RUN 运行程序:通过编程器仅能进行读操作 状态指示器 SF=系统错误:CPU内部错误
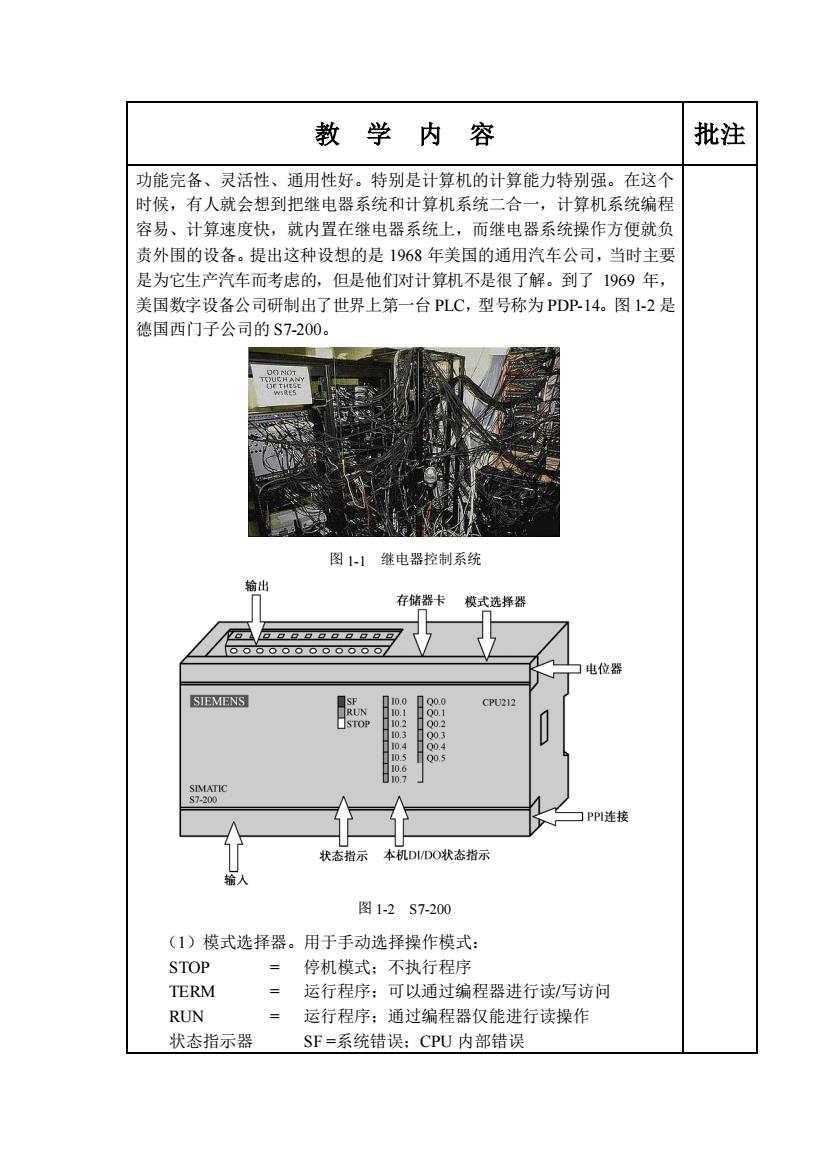
教 学 内 容 批注 功能完备、灵活性、通用性好。特别是计算机的计算能力特别强。在这个 时候,有人就会想到把继电器系统和计算机系统二合一,计算机系统编程 容易、计算速度快,就内置在继电器系统上,而继电器系统操作方便就负 责外围的设备。提出这种设想的是 1968 年美国的通用汽车公司,当时主要 是为它生产汽车而考虑的,但是他们对计算机不是很了解。到了 1969 年, 美国数字设备公司研制出了世界上第一台 PLC,型号称为 PDP-14。图 1-2 是 德国西门子公司的 S7-200。 图 1-1 继电器控制系统 图 1-2 S7-200 (1)模式选择器。用于手动选择操作模式: STOP = 停机模式;不执行程序 TERM = 运行程序;可以通过编程器进行读/写访问 RUN = 运行程序;通过编程器仅能进行读操作 状态指示器 SF =系统错误;CPU 内部错误
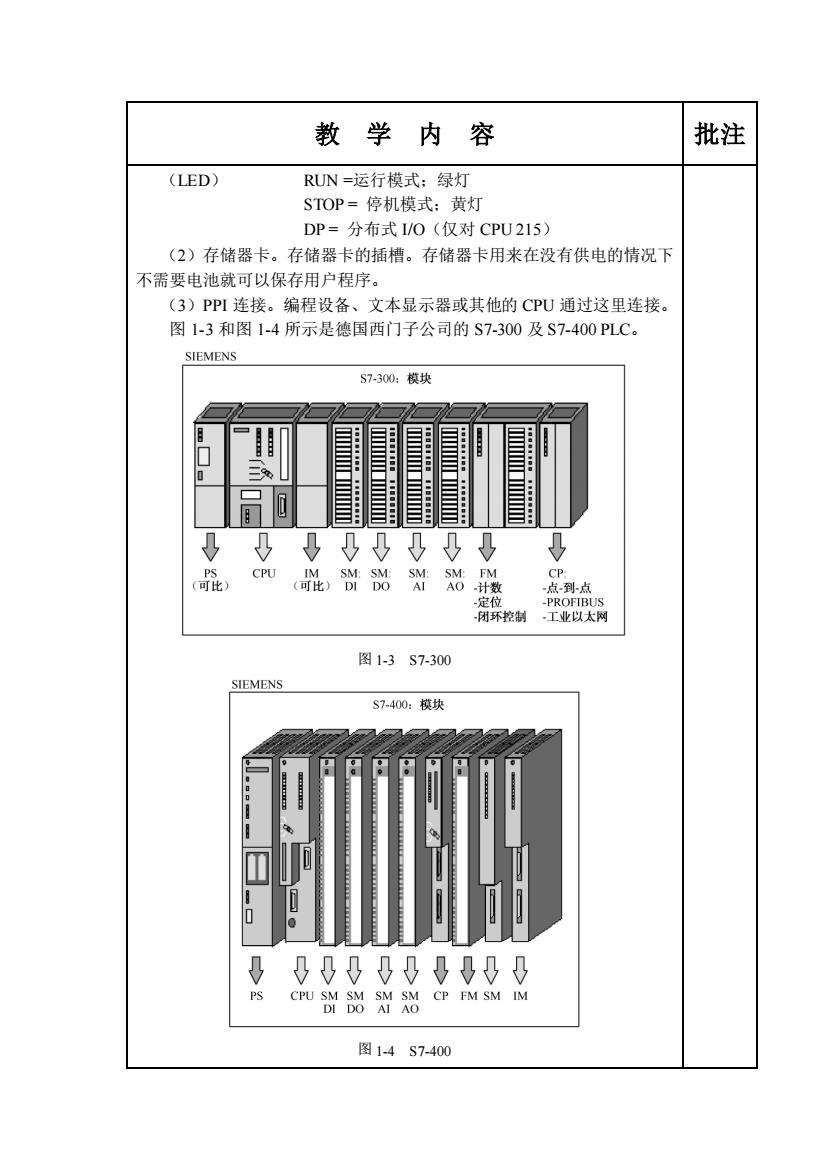
教学内容 批注 (LED) RUN=运行模式;绿灯 STOP=停机模式:黄灯 DP=分布式I/O(仅对CPU215) (2)存储器卡。存储器卡的插槽。存储器卡用来在没有供电的情况下 不需要电池就可以保存用户程序。 (3)PPI连接。编程设备、文本显示器或其他的CPU通过这里连接。 图1-3和图1-4所示是德国西门子公司的S7-300及S7-400PLC。 SIEMENS s7-300:模块 目 目目 CPU 点到点 闭环控制工业以太网 图1-3S7-300 SIEMENS S7-400:模块 05↓bb↓↓0↓ cU测CP FM SM IM 图1-4S7-400
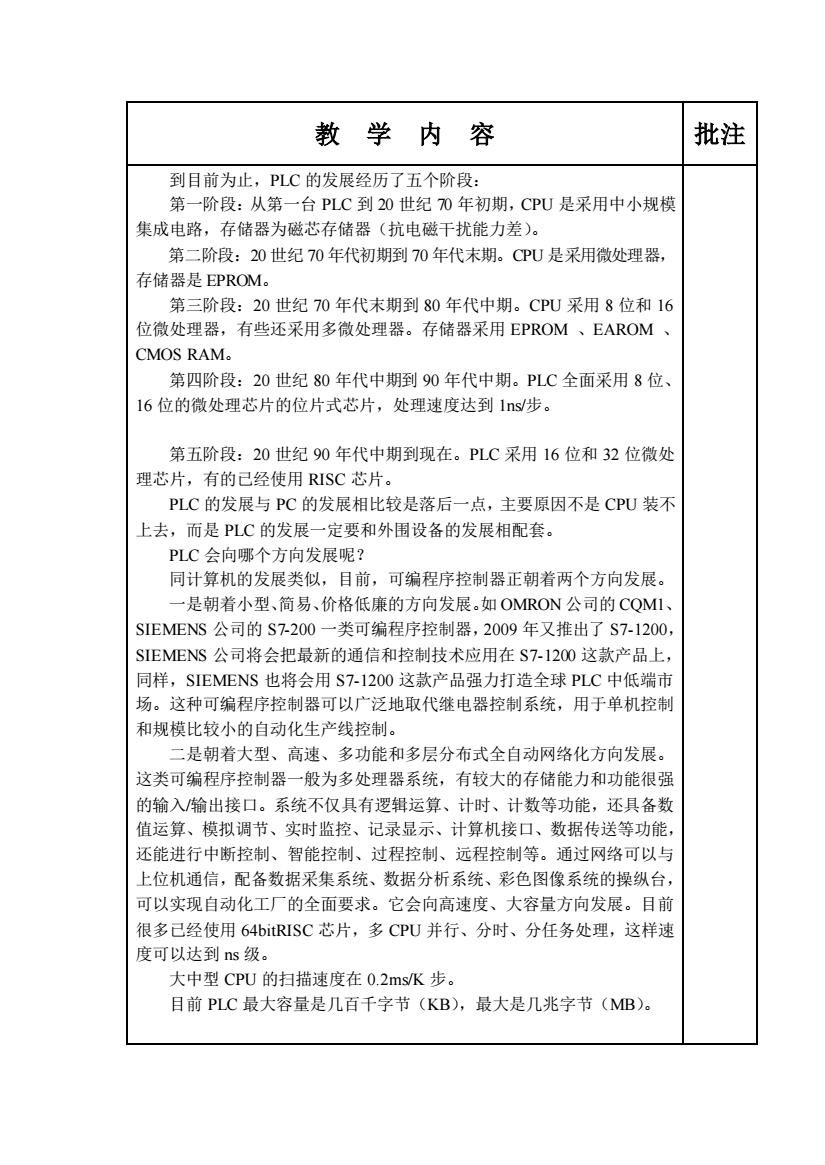
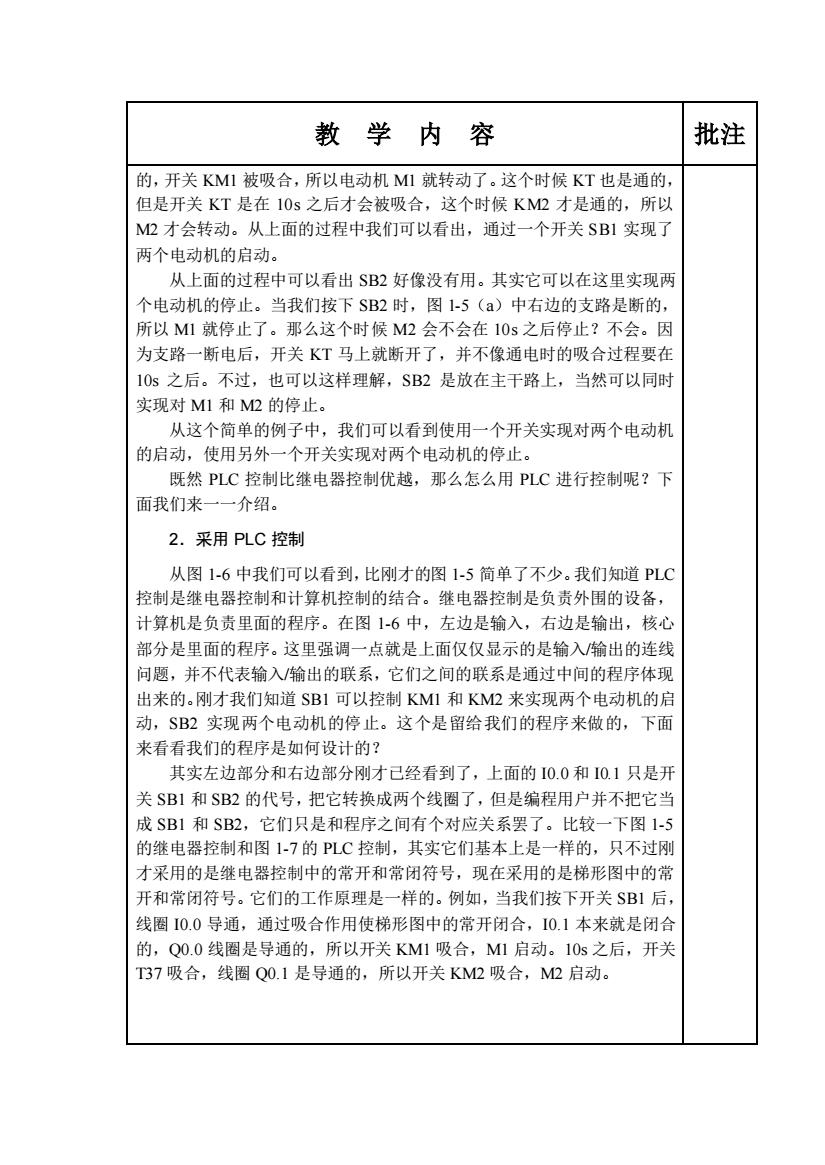
教 学 内 容 批注 (LED) RUN =运行模式;绿灯 STOP = 停机模式;黄灯 DP = 分布式 I/O(仅对 CPU 215) (2)存储器卡。存储器卡的插槽。存储器卡用来在没有供电的情况下 不需要电池就可以保存用户程序。 (3)PPI 连接。编程设备、文本显示器或其他的 CPU 通过这里连接。 图 1-3 和图 1-4 所示是德国西门子公司的 S7-300 及 S7-400 PLC。 图 1-3 S7-300 图 1-4 S7-400
教学内容 批注 到目前为止,PLC的发展经历了五个阶段: 第一阶段:从第一台PLC到20世纪0年初期,CPU是采用中小规模 集成电路,存储器为磁芯存储器(抗电磁干扰能力差)。 第二阶段:20世纪70年代初期到70年代末期。CPU是采用微处理器, 存储器是EPROM。 第三阶段:20世纪70年代末期到80年代中期。CPU采用8位和16 位微处理器,有些还采用多微处理器。存储器采用EPROM、EAROM CMOS RAM. 第四阶段:20世纪80年代中期到90年代中期。PLC全面采用8位、 16位的微处理芯片的位片式芯片,处理速度达到1s/步。 第五阶段:20世纪90年代中期到现在。PLC采用16位和32位微处 理芯片,有的己经使用RISC芯片。 PLC的发展与PC的发展相比较是落后一点,主要原因不是CPU装不 上去,而是PLC的发展一定要和外围设备的发展相配套。 川C会向哪个方向发展眼? 同计算机的发展类似,目前,可编程序控制器正朝着两个方向发展。 一是朝着小型、简易、价格低廉的方向发展.如OMRON公司的CQM1 SIEMENS公司的S7-200一类可编程序控制器,2009年又推出了S7-1200 SIEMENS公司将会把最新的通信和控制技术应用在S7-12OO这款产品上, 同样,SIEMENS也将会用S7-12O0这款产品强力打造全球PLC中低端市 场。这种可编程序控制器可以广泛地取代继电器控制系统,用于单机控制 和规模比较小的自动化生产线控制。 二是朝着大型、高速、多功能和多层分布式全自动网络化方向发展 这类可编程序控制器一般为多处理器系统,有较大的存储能力和功能很强 的输入输出接口。系统不仅具有逻辑运算、计时、计数等功能,还具备数 值运算、模拟调节、实时监控、记录显示、计算机接口、数据传送等功能, 还能进行中断控制、智能控制、过程控制、远程控制等。通过网络可以与 上位机通信,配备数据采集系统、数据分析系统、彩色图像系统的操纵台 可以实现自动化工厂的全面要求。它会向高速度、大容量方向发展。目前 很多已经使用64 bitRISC芯片,多CPU并行、分时、分任务处理,这样速 度可以达到ns级。 大中型CPU的扫描速度在0.2ms/K步。 目前PLC最大容量是几百千字节(KB),最大是几兆字节(MB)
教 学 内 容 批注 到目前为止,PLC 的发展经历了五个阶段: 第一阶段:从第一台 PLC 到 20 世纪 70 年初期,CPU 是采用中小规模 集成电路,存储器为磁芯存储器(抗电磁干扰能力差)。 第二阶段:20 世纪 70 年代初期到 70 年代末期。CPU 是采用微处理器, 存储器是 EPROM。 第三阶段:20 世纪 70 年代末期到 80 年代中期。CPU 采用 8 位和 16 位微处理器,有些还采用多微处理器。存储器采用 EPROM 、EAROM 、 CMOS RAM。 第四阶段:20 世纪 80 年代中期到 90 年代中期。PLC 全面采用 8 位、 16 位的微处理芯片的位片式芯片,处理速度达到 1ns/步。 第五阶段:20 世纪 90 年代中期到现在。PLC 采用 16 位和 32 位微处 理芯片,有的已经使用 RISC 芯片。 PLC 的发展与 PC 的发展相比较是落后一点,主要原因不是 CPU 装不 上去,而是 PLC 的发展一定要和外围设备的发展相配套。 PLC 会向哪个方向发展呢? 同计算机的发展类似,目前,可编程序控制器正朝着两个方向发展。 一是朝着小型、简易、价格低廉的方向发展。如 OMRON 公司的 CQM1、 SIEMENS 公司的 S7-200 一类可编程序控制器,2009 年又推出了 S7-1200, SIEMENS 公司将会把最新的通信和控制技术应用在 S7-1200 这款产品上, 同样,SIEMENS 也将会用 S7-1200 这款产品强力打造全球 PLC 中低端市 场。这种可编程序控制器可以广泛地取代继电器控制系统,用于单机控制 和规模比较小的自动化生产线控制。 二是朝着大型、高速、多功能和多层分布式全自动网络化方向发展。 这类可编程序控制器一般为多处理器系统,有较大的存储能力和功能很强 的输入/输出接口。系统不仅具有逻辑运算、计时、计数等功能,还具备数 值运算、模拟调节、实时监控、记录显示、计算机接口、数据传送等功能, 还能进行中断控制、智能控制、过程控制、远程控制等。通过网络可以与 上位机通信,配备数据采集系统、数据分析系统、彩色图像系统的操纵台, 可以实现自动化工厂的全面要求。它会向高速度、大容量方向发展。目前 很多已经使用 64bitRISC 芯片,多 CPU 并行、分时、分任务处理,这样速 度可以达到 ns 级。 大中型 CPU 的扫描速度在 0.2ms/K 步。 目前 PLC 最大容量是几百千字节(KB),最大是几兆字节(MB)

教学内容 批注 1.3PLC的工作原理 在讲述PLC工作原理之前我们先来看看继电器控制的例子,如图15 所示。 1.采用继电器控制 图1-5(a)是它的控制原理图,图15(b)是一个电动机主电路图, 也就是它的接线图。上面接的是电源,这个符号是熔丝标志,电源可以得 到过滤,不会出现过载现象。虚线表示是联动开关,表明这三个开关一起 动作。通过接线连接下面两个电动机M1和M2。KM1和KM2也是联动开 关,在实际中就是强电开关,就是我们平时见到的闸刀开关,是手动方式 操作的。如果采用继电器控制的话,KM1和KM2作为被控对象,用一个 线图的通和新,也就是1和0来决定开关KM1的桶和新。从这个图中升 们可以设计两个线圈KM1和KM2,通过线圈的吸合作用来实现对该电路 的控制。这就是继电器控制。 图1-5()并不是一个完整的控制电路图,只是一个电路控制原理图。 看到的并不是它的实际摆放图。先看图中的几个符号,SB1、SB2是按钮, SB1表示常开,SB2表示常闭,这都是在初始状态下的状况。KM1、KM2 是接触器,KT是时间继电器。从图1-5(a)中可以看到,有两个KM, 右边的KM1表示一个线圈,通过它的吸合作用来决定左边的KM1的通和 断,也就是右边的KM1起主动作用,左边的是被控对象。同样,KT也是 一样的,只不过它是在一定的时间延时之后才可以导通,图中显示的是10s, 也就是在KT通电1Os时间后,开关KT才可以闭合。 KM□ KMI KT KM2 (a)控制电路 《b)电动机主电路 图1-5采用继电器控制 下面看它是如何工作的。按下SB1,因为SB2是常闭的,KM是通
教 学 内 容 批注 1.3 PLC 的工作原理 在讲述 PLC 工作原理之前我们先来看看继电器控制的例子,如图 1-5 所示。 1.采用继电器控制 图 1-5(a)是它的控制原理图,图 1-5(b)是一个电动机主电路图, 也就是它的接线图。上面接的是电源,这个符号是熔丝标志,电源可以得 到过滤,不会出现过载现象。虚线表示是联动开关,表明这三个开关一起 动作。通过接线连接下面两个电动机 M1 和 M2。KM1 和 KM2 也是联动开 关,在实际中就是强电开关,就是我们平时见到的闸刀开关,是手动方式 操作的。如果采用继电器控制的话,KM1 和 KM2 作为被控对象,用一个 线圈的通和断,也就是 1 和 0 来决定开关 KM1 的通和断。从这个图中我 们可以设计两个线圈 KM1 和 KM2,通过线圈的吸合作用来实现对该电路 的控制。这就是继电器控制。 图 1-5(a)并不是一个完整的控制电路图,只是一个电路控制原理图。 看到的并不是它的实际摆放图。先看图中的几个符号,SB1、SB2 是按钮, SB1 表示常开,SB2 表示常闭,这都是在初始状态下的状况。KM1、KM2 是接触器,KT 是时间继电器。从图 1-5(a)中可以看到,有两个 KM1, 右边的 KM1 表示一个线圈,通过它的吸合作用来决定左边的 KM1 的通和 断,也就是右边的 KM1 起主动作用,左边的是被控对象。同样,KT 也是 一样的,只不过它是在一定的时间延时之后才可以导通,图中显示的是10s, 也就是在 KT 通电 10s 时间后,开关 KT 才可以闭合。 图 1-5 采用继电器控制 下面看它是如何工作的。按下 SB1,因为 SB2 是常闭的,KM1 是通
教学内容 批注 的,开关KM1被吸合,所以电动机M1就转动了。这个时候KT也是通的, 但是开关KT是在10s之后才会被吸合,这个时候KM2才是通的,所以 M2才会转动。从上面的过程中我们可以看出,通过一个开关SB1实现了 两个电动机的启动。 从上面的过程中可以看出SB2好像没有用。其实它可以在这里实现两 个电动机的停止。当我们按下SB2时,图1-5(a)中右边的支路是断的, 所以M1就停止了。那么这个时候M2会不会在10s之后停止?不会。因 为支路一断电后,开关KT马上就断开了,并不像通电时的吸合过程要在 10s之后。不过,也可以这样理解,SB2是放在主干路上,当然可以同时 实现对M1和M2的停止。 从这个简单的例子中,我们可以看到使用一个开关实现对两个电动机 的启动,使用另外一个开关实现对两个电动机的停止。 既然PLC控制比继电器控制优越,那么怎么用PLC进行控制呢?下 面我们来一一介绍。 2.采用PLC控制 从图1-6中我们可以看到,比刚才的图15简单了不少。我们知道PLC 控制是继电器控制和计算机控制的结合。继电器控制是负责外围的设备, 计算机是负责里面的程序。在图16中,左边是输入,右边是输出,核心 部分是里面的程序。这里强调一点就是上面仅仅显示的是输入输出的连线 问题,并不代表输入输出的联系,它们之间的联系是通过中间的程序体现 出来的.刚才我们知道SB1可以控制KM1和KM2来实现两个电动机的启 动,SB2实现两个电动机的停止。这个是留给我们的程序来做的,下面 来看看我们的程序是如何设计的? 其实左边部分和右边部分刚才己经看到了,上面的0.0和0.1只是开 关SB1和SB2的代号,把它转换成两个线圈了,但是编程用户并不把它当 成SB1和SB2,它们只是和程序之间有个对应关系罢了。比较一下图1-5 的继电器控制和图1-7的PLC控制,其实它们基本上是一样的,只不过刚 才采用的是继电器控制中的常开和常闭符号,现在采用的是梯形图中的常 开和常闭符号。它们的工作原理是一样的。例如,当我们按下开关SB1后 线圈10.0导通,通过吸合作用使梯形图中的常开闭合,10.1本来就是闭含 的,Q0.0线圈是导通的,所以开关KM1吸合,M1启动。10s之后,开关 B7吸合,线圈Q0.1是导通的,所以开关KM2吸合,M2启动
教 学 内 容 批注 的,开关 KM1 被吸合,所以电动机 M1 就转动了。这个时候 KT 也是通的, 但是开关 KT 是在 10s 之后才会被吸合,这个时候 KM2 才是通的,所以 M2 才会转动。从上面的过程中我们可以看出,通过一个开关 SB1 实现了 两个电动机的启动。 从上面的过程中可以看出 SB2 好像没有用。其实它可以在这里实现两 个电动机的停止。当我们按下 SB2 时,图 1-5(a)中右边的支路是断的, 所以 M1 就停止了。那么这个时候 M2 会不会在 10s 之后停止?不会。因 为支路一断电后,开关 KT 马上就断开了,并不像通电时的吸合过程要在 10s 之后。不过,也可以这样理解,SB2 是放在主干路上,当然可以同时 实现对 M1 和 M2 的停止。 从这个简单的例子中,我们可以看到使用一个开关实现对两个电动机 的启动,使用另外一个开关实现对两个电动机的停止。 既然 PLC 控制比继电器控制优越,那么怎么用 PLC 进行控制呢?下 面我们来一一介绍。 2.采用 PLC 控制 从图 1-6 中我们可以看到,比刚才的图 1-5 简单了不少。我们知道 PLC 控制是继电器控制和计算机控制的结合。继电器控制是负责外围的设备, 计算机是负责里面的程序。在图 1-6 中,左边是输入,右边是输出,核心 部分是里面的程序。这里强调一点就是上面仅仅显示的是输入/输出的连线 问题,并不代表输入/输出的联系,它们之间的联系是通过中间的程序体现 出来的。刚才我们知道 SB1 可以控制 KM1 和 KM2 来实现两个电动机的启 动,SB2 实现两个电动机的停止。这个是留给我们的程序来做的,下面 来看看我们的程序是如何设计的? 其实左边部分和右边部分刚才已经看到了,上面的 I0.0 和 I0.1 只是开 关 SB1 和 SB2 的代号,把它转换成两个线圈了,但是编程用户并不把它当 成 SB1 和 SB2,它们只是和程序之间有个对应关系罢了。比较一下图 1-5 的继电器控制和图 1-7 的 PLC 控制,其实它们基本上是一样的,只不过刚 才采用的是继电器控制中的常开和常闭符号,现在采用的是梯形图中的常 开和常闭符号。它们的工作原理是一样的。例如,当我们按下开关 SB1 后, 线圈 I0.0 导通,通过吸合作用使梯形图中的常开闭合,I0.1 本来就是闭合 的,Q0.0 线圈是导通的,所以开关 KM1 吸合,M1 启动。10s 之后,开关 T37 吸合,线圈 Q0.1 是导通的,所以开关 KM2 吸合,M2 启动