第2章 自动控制系统基本知识 本章重点: 。1.建立控制系统数学模型的方法 。2.控制系统传递函数解法 本章难点: 。1.控制系统时域分析 。2.控制系统频域分析 第2章自动控制系统基本知识
第2章 自动控制系统基本知识 1 第2章 自动控制系统基本知识 本章重点: ⚫ 1.建立控制系统数学模型的方法 ⚫ 2.控制系统传递函数解法 本章难点: ⚫ 1.控制系统时域分析 ⚫ 2. 控制系统频域分析
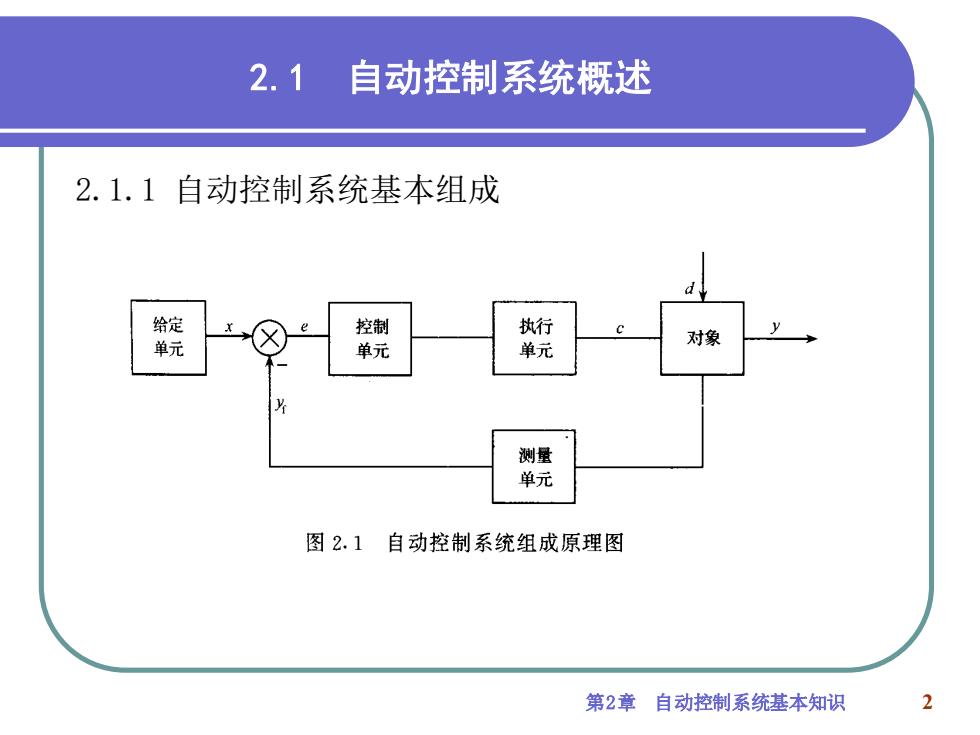
2.1 自动控制系统概述 2.1.1自动控制系统基本组成 控制 执行 单元 单元 单元 对象 测量 单元 图2.1自动控制系统组成原理图 第2章自动控制系统基本知识 2
第2章 自动控制系统基本知识 2 2.1 自动控制系统概述 2.1.1 自动控制系统基本组成
2.1自动控制系统概述 2.1.2自动控制系统的分类 1.按系统输入信号的特点分类 1)定值系统 2)随动系统 3)程序控制系统 2.按系统信号的传递特点分类 1)开环控制系统 2)闭环控制系统 3)复合环控制系统 3.按系统的变量分类 1)连续控制系统 2)离散控制系统 第2章自动控制系统基本知识 3
第2章 自动控制系统基本知识 3 2.1.2 自动控制系统的分类 2.1 自动控制系统概述 1.按系统输入信号的特点分类 1)定值系统 2)随动系统 3)程序控制系统 2.按系统信号的传递特点分类 1)开环控制系统 2)闭环控制系统 3)复合环控制系统 3.按系统的变量分类 1)连续控制系统 2)离散控制系统
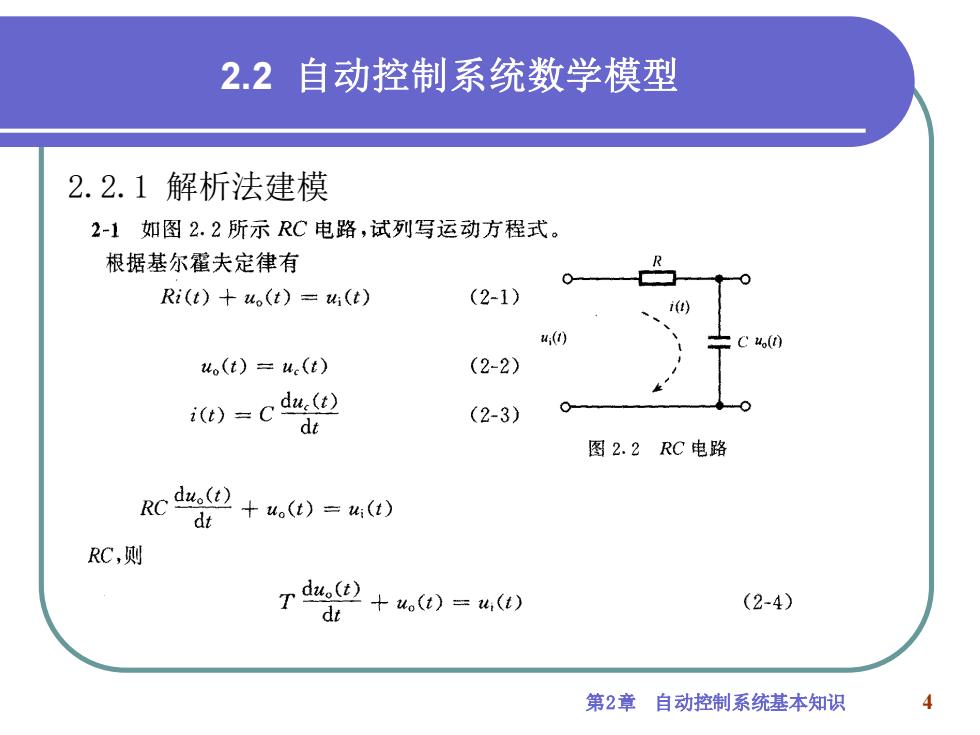
2.2自动控制系统数学模型 2.2.1解析法建模 2-1如图2.2所示RC电路,试列写运动方程式。 根据基尔霍夫定律有 Ri(t)+u,(t)=(t) (2-1) i(t) ,() C(0 uo(t)=uc(t) (2-2) i()=cdu:() 0- dt (2-3) 图2.2RC电路 Rc6+,e)=4,a0 dt RC,则 Tdue(t) dt 十(t)=u(t) (2-4) 第2章自动控制系统基本知识
第2章 自动控制系统基本知识 4 2.2 自动控制系统数学模型 2.2.1 解析法建模
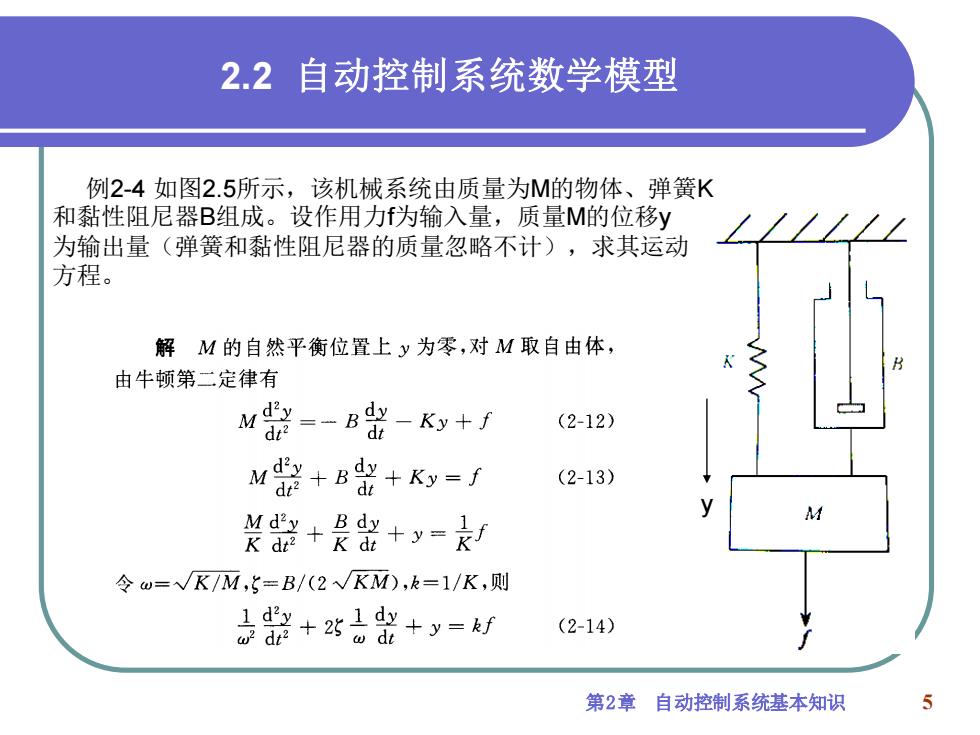
2.2自动控制系统数学模型 例2-4如图2.5所示,该机械系统由质量为M的物体、弹簧K 和黏性阻尼器B组成。设作用力f为输入量,质量M的位移y 为输出量(弹簧和黏性阻尼器的质量忽略不计),求其运动 方程。 解M的自然平衡位置上y为零,对M取自由体, 由牛顿第二定律有 M2=-B业-Ky+f (2-12) dt2 M整+B登+K=/ dt (2-13) 能+长整+y= 令w=√K/M,5=B/(2√KM),k=1/K,则 器+2x整+y=财 (2-14) 第2章自动控制系统基本知识
第2章 自动控制系统基本知识 5 2.2 自动控制系统数学模型 例2-4 如图2.5所示,该机械系统由质量为M的物体、弹簧K 和黏性阻尼器B组成。设作用力f为输入量,质量M的位移y 为输出量(弹簧和黏性阻尼器的质量忽略不计),求其运动 方程。 y