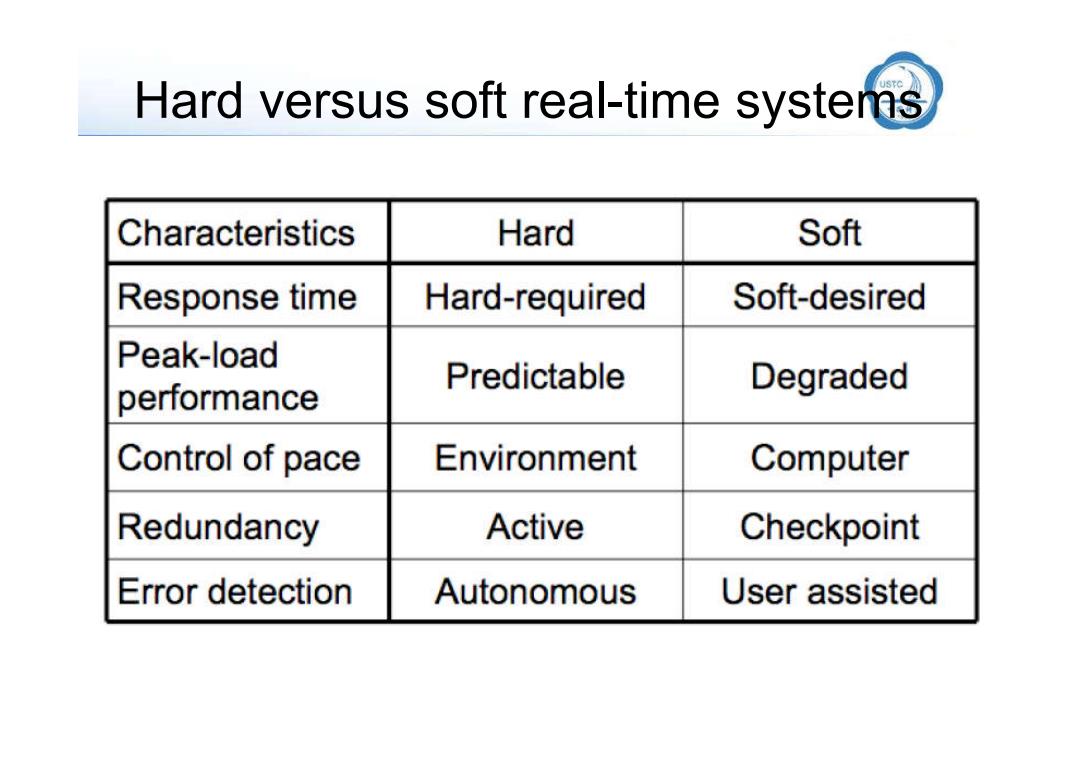
Hard versus soft real-time systems Characteristics Hard Soft Response time Hard-required Soft-desired Peak-load Predictable Degraded performance Control of pace Environment Computer Redundancy Active Checkpoint Error detection Autonomous User assisted
Hard versus soft real-time systems
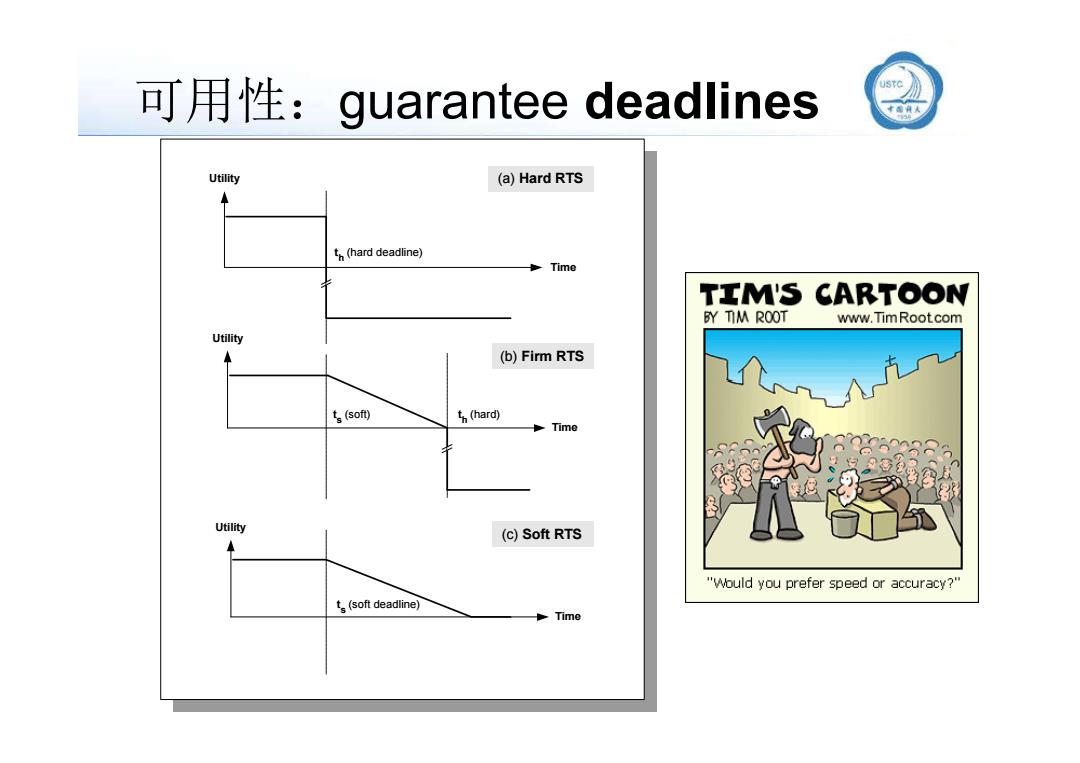
可用性:guarantee deadlines Utility (a)Hard RTS th(hard deadline) Time TIM'S CARTOON BY TIM ROOT www.Tim Rootcom Utility (b)Firm RTS t(soft) th(hard) Time Utility (c)Soft RTS "Would you prefer speed or accuracy?" t(soft deadline) Time
可用性:guarantee deadlines Utility Time t h (hard deadline) (a) Hard RTS Utility (b) Firm RTS t h (hard) Time t s (soft) Utility (c) Soft RTS Time t s (soft deadline)
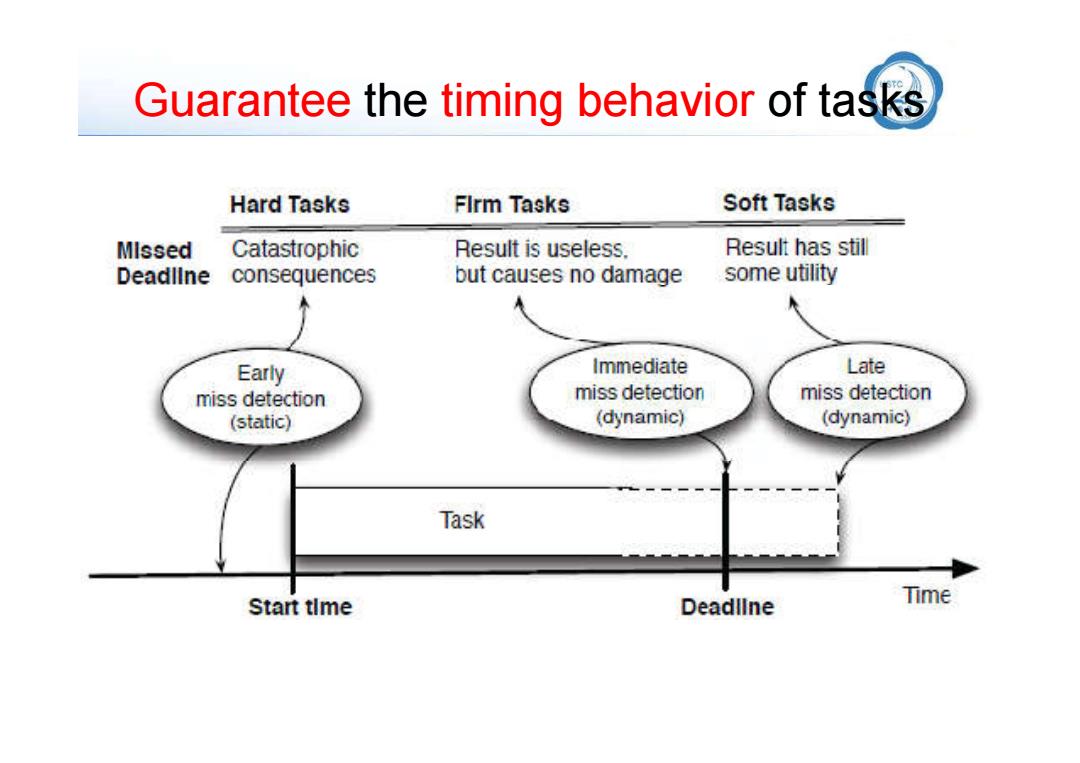
Guarantee the timing behavior of tasks Hard Tasks FIrm Tasks Soft Tasks MIssed Catastrophic Result is useless. Result has still Deadllne consequences but causes no damage some utility Early Immediate Late miss detection miss detection miss detection (static) (dynamic) (dynamic) Task Start tlme Deadllne Time
Guarantee the timing behavior of tasks
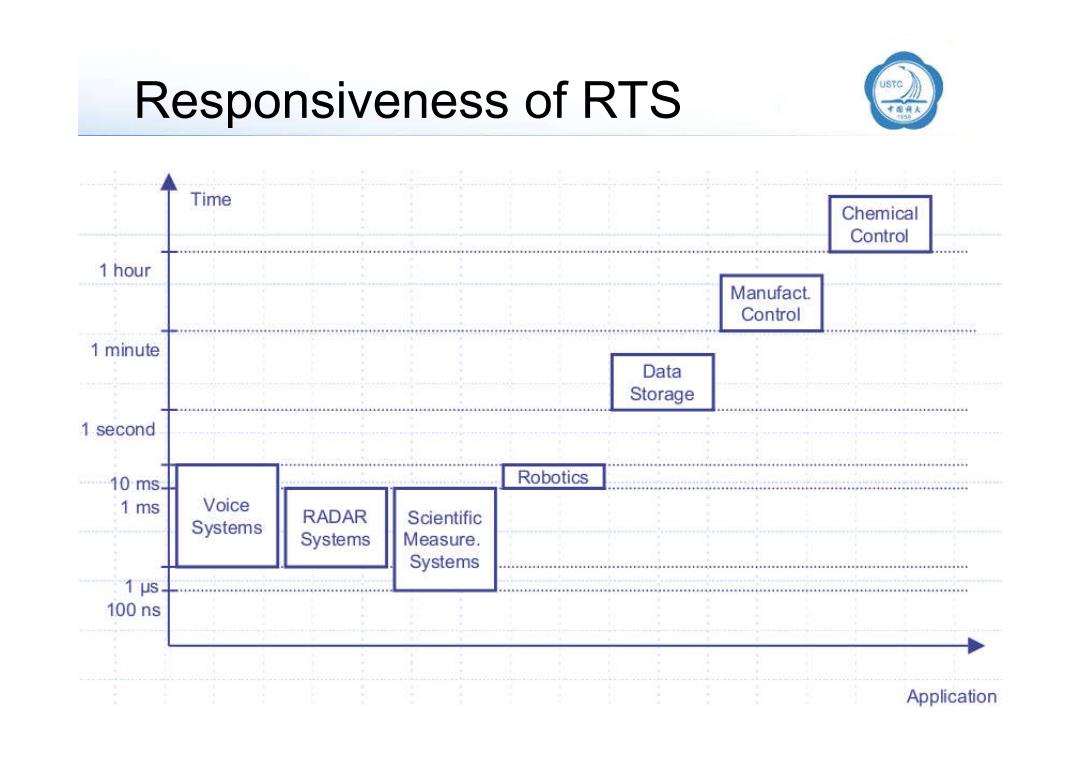
Responsiveness of RTS Time Chemical Control 1 hour Manufact. Control 1 minute Data Storage 1 second 10 ms- Robotics 1ms Voice Systems RADAR Scientific Systems Measure Systems 1μs 100ns Application
Responsiveness of RTS
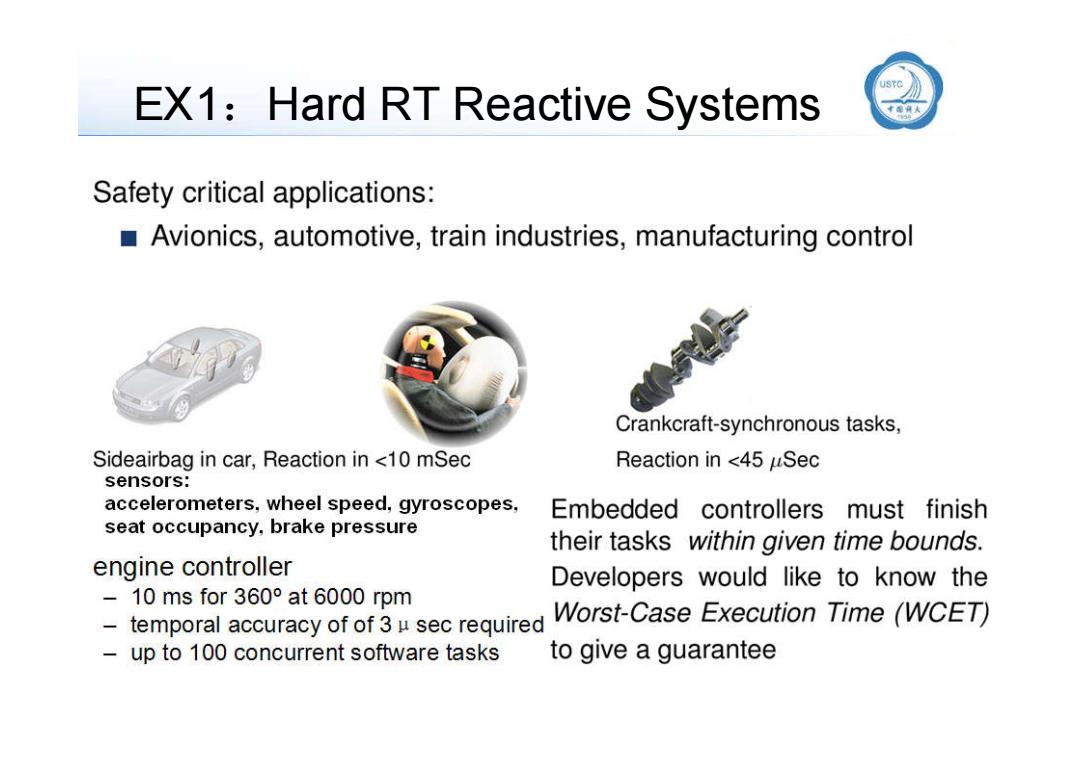
EX1:Hard RT Reactive Systems Safety critical applications: Avionics,automotive,train industries,manufacturing control Crankcraft-synchronous tasks, Sideairbag in car,Reaction in <10 mSec Reaction in <45 uSec sensors: accelerometers,wheel speed,gyroscopes, Embedded controllers must finish seat occupancy,brake pressure their tasks within given time bounds. engine controller Developers would like to know the 10 ms for 360 at 6000 rpm -temporal accuracy of of3sec required Worst-Case Execution Time (WCET) up to 100 concurrent software tasks to give a guarantee
EX1:Hard RT Reactive Systems