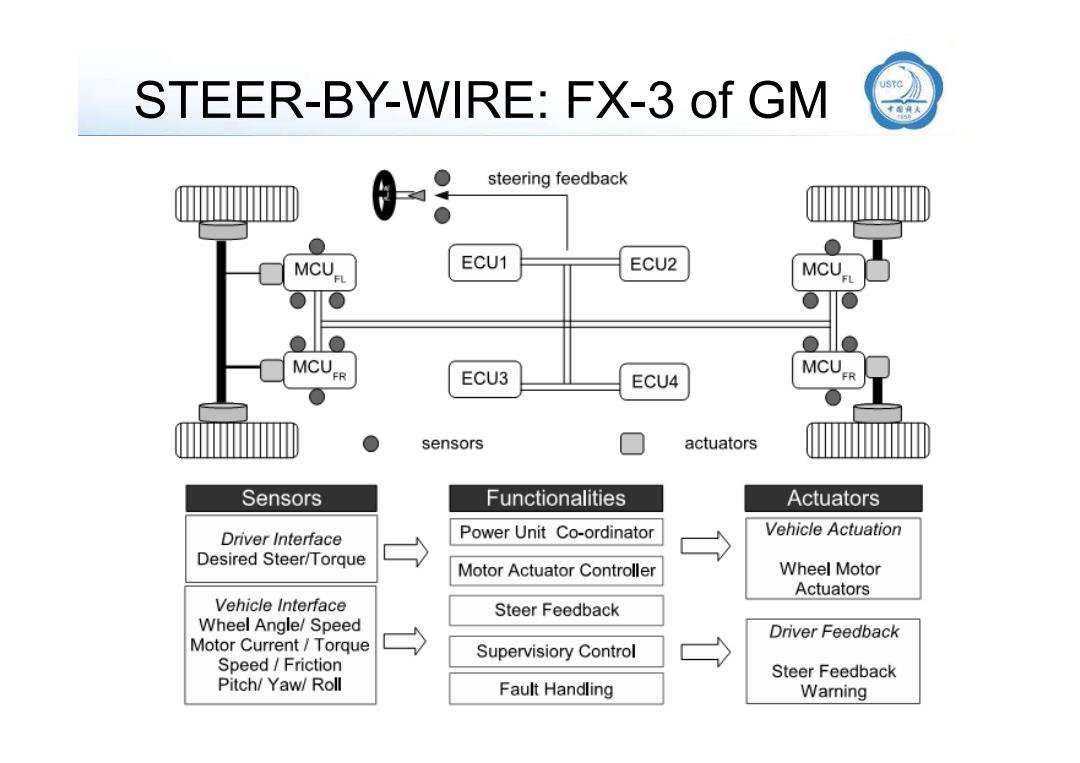
STEER-BY-WIRE:FX-3 of GM steering feedback ECU1 ECU2 MCU ECU3 ECU4 sensors actuators Sensors Functionalities Actuators Driver Interface Power Unit Co-ordinator Vehicle Actuation Desired Steer/Torque Motor Actuator Controller Wheel Motor Actuators Vehicle Interface Steer Feedback Wheel Angle/Speed Driver Feedback Motor Current/Torque Supervisiory Control Speed/Friction Steer Feedback Pitch/Yaw/Roll Fault Handling Warning
STEER-BY-WIRE: FX-3 of GM
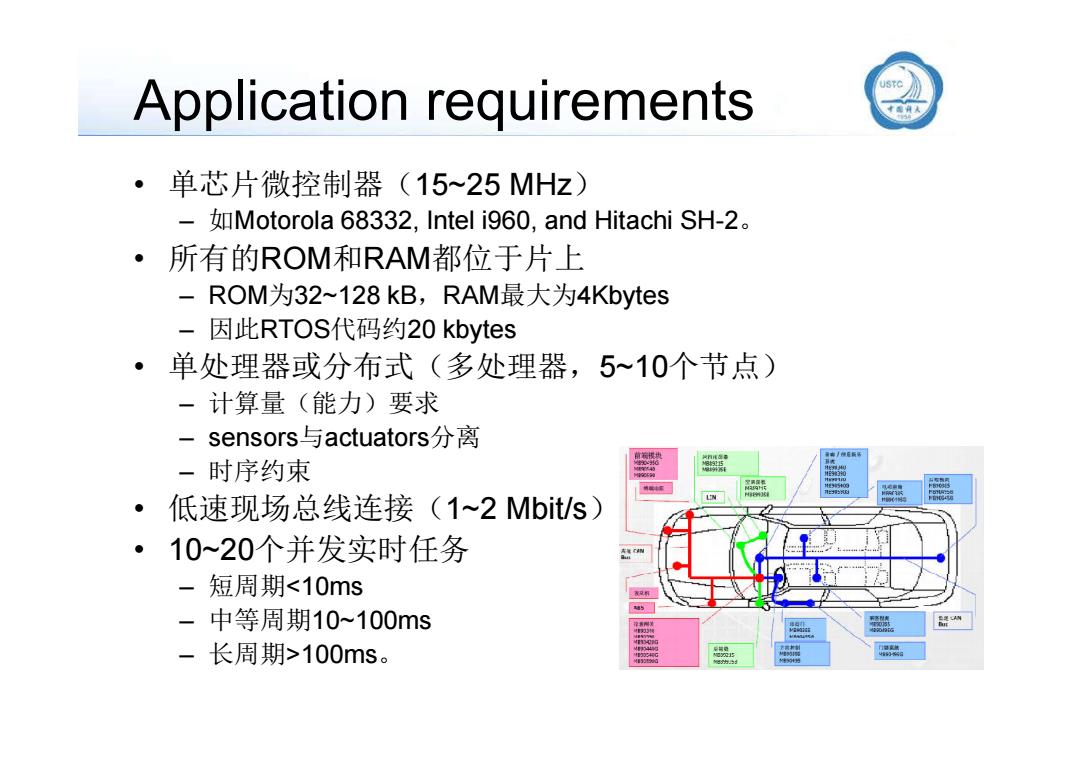
Application requirements 。 单芯片微控制器(15~25MHz) -Motorola 68332,Intel i960,and Hitachi SH-2. ·所有的ROM和RAM都位于片上 -ROM为32~128kB,RAM最大为4 Kbytes -因此RTOS代码约20 kbytes 。」 单处理器或分布式(多处理器,5~10个节点) -计算量(能力)要求 一 sensors.与actuators分离 - 时序约束 。 低速现场总线连接(1~2Mbit/s) ● 10~20个并发实时任务 -短周期<10ms -中等周期10~100ms -长周期>100ms
Application requirements • 单芯片微控制器(15~25 MHz) – 如Motorola 68332, Intel i960, and Hitachi SH-2。 • 所有的ROM和RAM都位于片上 – ROM为32~128 kB,RAM最大为4Kbytes – 因此RTOS代码约20 kbytes • 单处理器或分布式 单处理器或分布式(多处理器,5~10个节点) – 计算量(能力)要求 – sensors与actuators分离 – 时序约束 • 低速现场总线连接(1~2 Mbit/s) • 10~20个并发实时任务 – 短周期<10ms – 中等周期10~100ms – 长周期>100ms
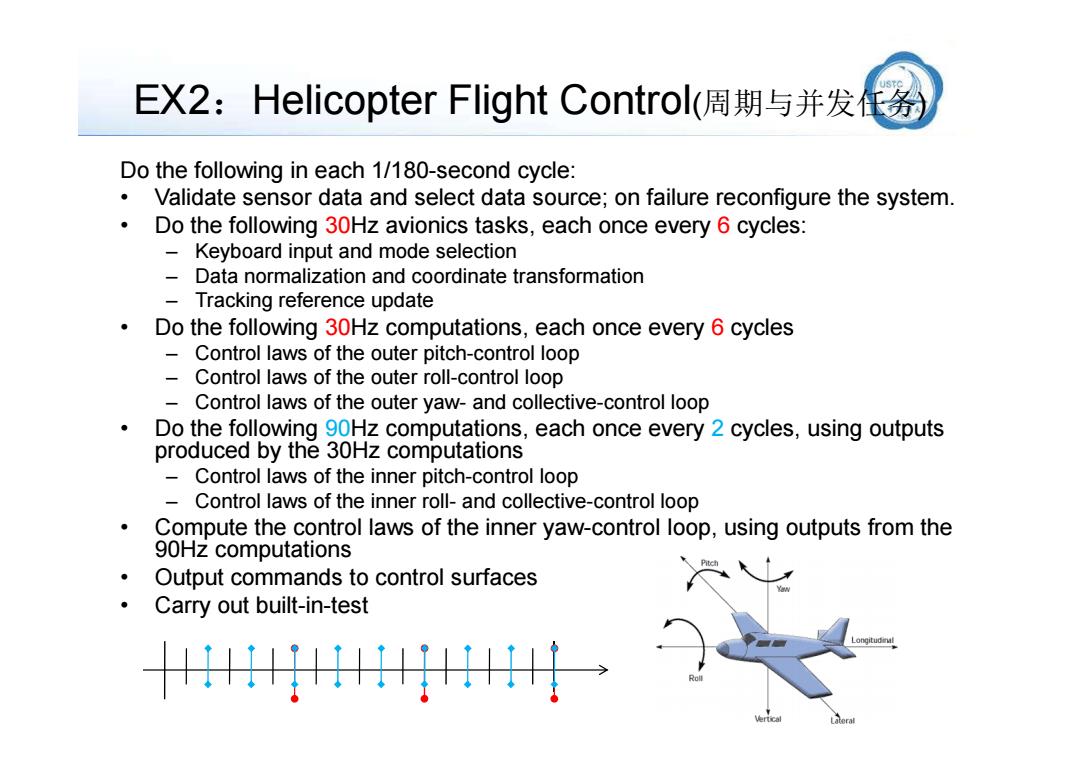
EX2:Helicopter Flight Control(周期与并发任务 Do the following in each 1/180-second cycle: Validate sensor data and select data source;on failure reconfigure the system. Do the following 30Hz avionics tasks,each once every 6 cycles: - Keyboard input and mode selection Data normalization and coordinate transformation - Tracking reference update Do the following 30Hz computations,each once every 6 cycles Control laws of the outer pitch-control loop Control laws of the outer roll-control loop Control laws of the outer yaw-and collective-control loop Do the following 90Hz computations,each once every 2 cycles,using outputs produced by the 30Hz computations Control laws of the inner pitch-control loop Control laws of the inner roll-and collective-control loop Compute the control laws of the inner yaw-control loop,using outputs from the 90Hz computations Output commands to control surfaces Carry out built-in-test 4
EX2:Helicopter Flight Control(周期与并发任务) Do the following in each 1/180-second cycle: • Validate sensor data and select data source; on failure reconfigure the system. • Do the following 30Hz avionics tasks, each once every 6 cycles: – Keyboard input and mode selection – Data normalization and coordinate transformation – Tracking reference update • Do the following 30Hz computations, each once every 6 cycles – Control laws of the outer pitch-control loop – Control laws of the outer roll-control loop – Control laws of the outer yaw- and collective-control loop • Do the following 90Hz computations, each once every 2 cycles, using outputs produced by the 30Hz computations – Control laws of the inner pitch-control loop – Control laws of the inner roll- and collective-control loop • Compute the control laws of the inner yaw-control loop, using outputs from the 90Hz computations • Output commands to control surfaces • Carry out built-in-test
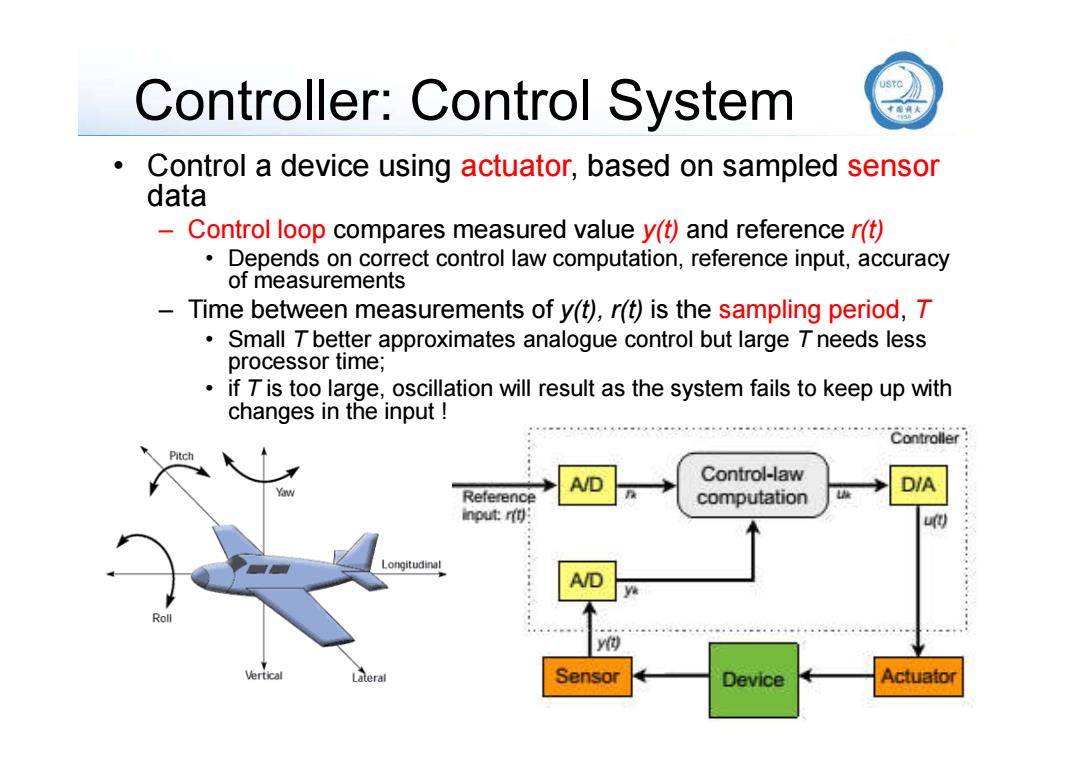
Controller:Control System Control a device using actuator,based on sampled sensor data Control loop compares measured value y(t)and reference r(t) Depends on correct control law computation,reference input,accuracy of measurements Time between measurements of y(t),r(t)is the sampling period,T Small T better approximates analogue control but large T needs less processor time; 。 if T is too large,oscillation will result as the system fails to keep up with changes in the input Pitch Control-law Reference computation nput间明 Longitudinal Rol y() Lateral Sensor Device Actuator
Controller: Control System • Control a device using actuator, based on sampled sensor data – Control loop compares measured value y(t) and reference r(t) • Depends on correct control law computation, reference input, accuracy of measurements – Time between measurements of y(t), r(t) is the sampling period, T • Small T better approximates analogue control but large T needs less processor time; • if T is too large, oscillation will result as the system fails to keep up with changes in the input !
Control Law computation sampling period,T (kT)=Gx(T)》 reads its inputs u, ((k+1)T)F(x(kT).u(kT)) computes its outputs y, n up dates its state x write (0) write (1) write y(2) 小 control equations 0 T 2T 套time output equation ·ykT可,z(kT刀 read u(0) read u(1) read u(2) state equation ·X(k+1)T刀,w(k+1)T set timer to interrupt periodically with period T; 一时序假设: at each timer interrupt do ·one-step delay同步:Moore do analog-to-digital conversion to gety; compute control output u; ·zero time同步:Mealy output u and do digital-to-analog conversion; control systems composition od 2(kT)G1(w(kT),u(kT)) y(kT)=G2(x(kT)) w((k +1)T)=Fi(w(kT),u(kT)) x((k+1T)=F2(x(kT),z(kT))
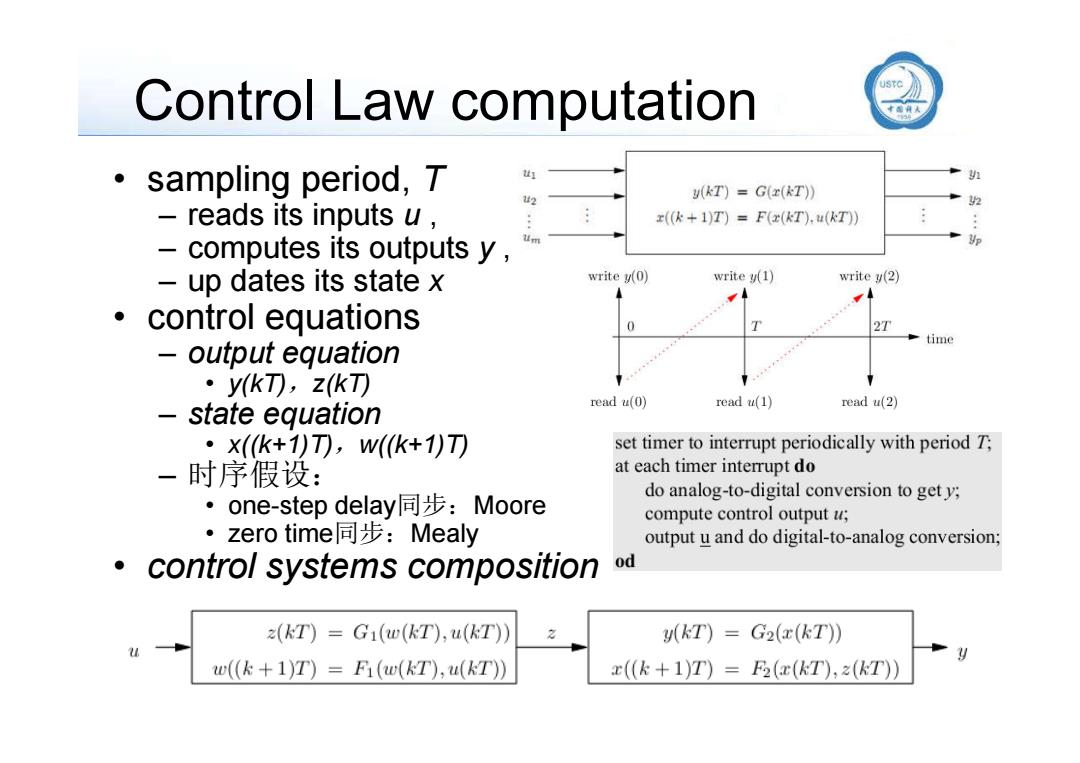
Control Law computation • sampling period, T – reads its inputs u , – computes its outputs y , – up dates its state x • control equations – output equation • y(kT),z(kT) – state equation • x((k+1)T),w((k+1)T) – 时序假设: • one-step delay同步:Moore • zero time同步:Mealy • control systems composition