X—磁头相对磁尺的位移: ω一一励磁电压的角频率。 这种调制输出信号跟磁头与磁尺的相对速度无关。为了辨别磁头在磁尺上的移动方 向,通常采用了间距为(m±14)元的两组磁头(其中m为任意正整数)。如图2一9所 示,、为励磁电流,其输出电压分别为 U.-Uesn225snor (2-20) U-Ucos (2-210 图2一9辨向磁头配置 U山和仍是相位相差90°的两列脉冲。至于哪个导前,则取决于磁尺的移动方向。 根据两个磁头输出信号的超前或滞后,可确定其移动方向。 (二)测量方式 磁栅的测量方式有鉴幅测量方式和鉴相测量方式。 1.鉴幅测量方式 如前所述,磁头有两组信号输出,将高频载波滤掉后则得到相位差为π2的两组信 U=Uosin2x (2-22) U:=U.cos2x (2-23) 两组磁头相对于磁尺每移动一个节距发出一个正(余)弦信号,经信号处理后可进 行位置检测。这种方法的检测线路比较简单,但分辨率受到录磁节距1的限制,若要提 高分辨率就必须采用较复杂的信频电路,所以不常采用。 2.鉴相测量方式 采用相位检测的精度可以大大高于录磁节距A,并可以通过提高内插脉冲频率以提 高系统的分辨率。将图中一组磁头的励磁信号移相90°,则得到输出电压为 2.11
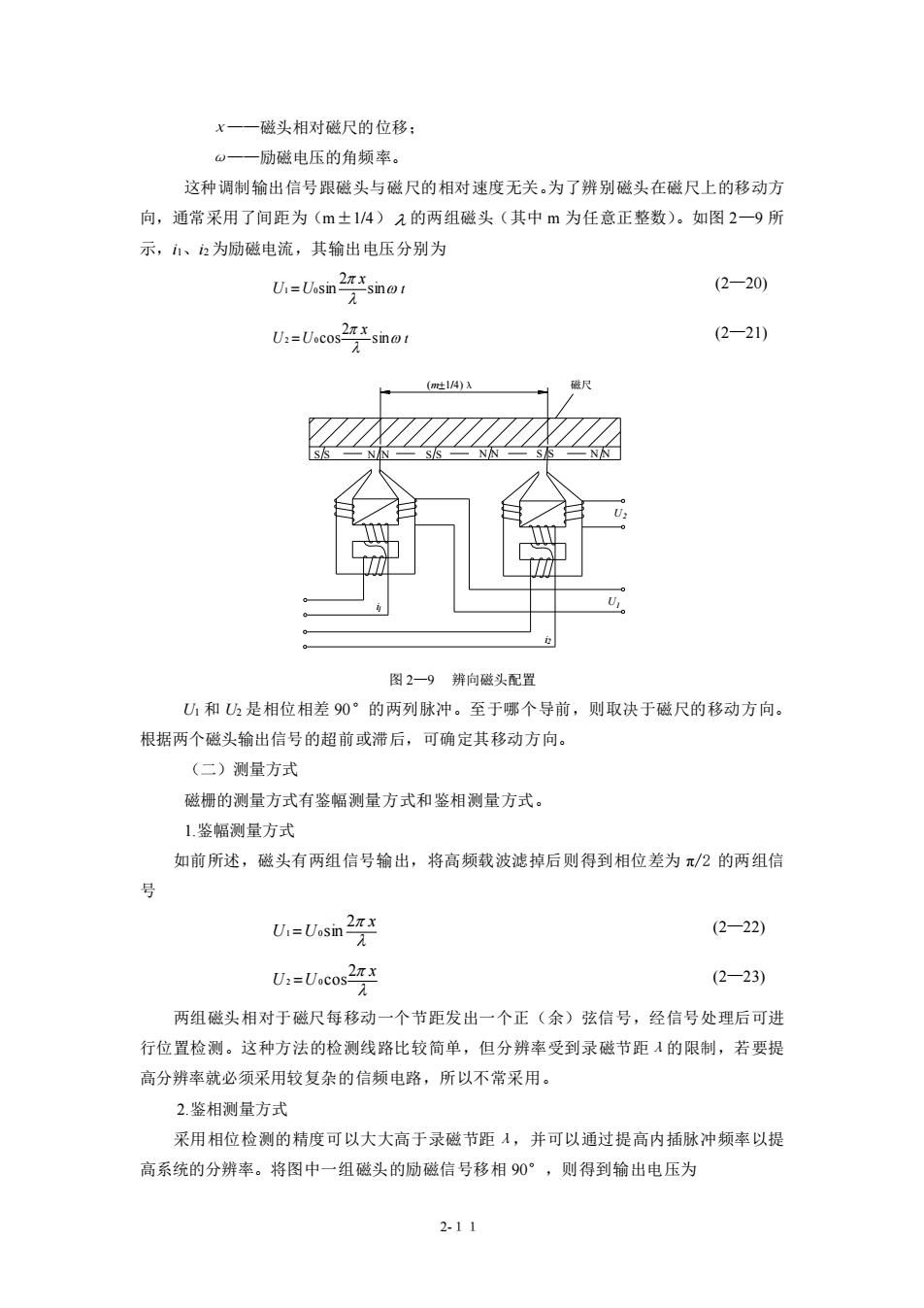
2-11 χ——磁头相对磁尺的位移; ω——励磁电压的角频率。 这种调制输出信号跟磁头与磁尺的相对速度无关。为了辨别磁头在磁尺上的移动方 向,通常采用了间距为(m±1/4) 的两组磁头(其中 m 为任意正整数)。如图 2—9 所 示,i1、i2 为励磁电流,其输出电压分别为 t x U U sin 2 1 = 0sin (2—20) t x U U sin 2 2 = 0 cos (2—21) 图 2—9 辨向磁头配置 U1 和 U2 是相位相差 90°的两列脉冲。至于哪个导前,则取决于磁尺的移动方向。 根据两个磁头输出信号的超前或滞后,可确定其移动方向。 (二)测量方式 磁栅的测量方式有鉴幅测量方式和鉴相测量方式。 1.鉴幅测量方式 如前所述,磁头有两组信号输出,将高频载波滤掉后则得到相位差为 π/2 的两组信 号 x U U 2 1 = 0 sin (2—22) x U U 2 2 = 0 cos (2—23) 两组磁头相对于磁尺每移动一个节距发出一个正(余)弦信号,经信号处理后可进 行位置检测。这种方法的检测线路比较简单,但分辨率受到录磁节距λ的限制,若要提 高分辨率就必须采用较复杂的信频电路,所以不常采用。 2.鉴相测量方式 采用相位检测的精度可以大大高于录磁节距λ,并可以通过提高内插脉冲频率以提 高系统的分辨率。将图中一组磁头的励磁信号移相 90°,则得到输出电压为 i2 磁尺 S 1 i S S N N S N N S S (m+1/4) _ λ U1 U2 N N

U=U.sincos (2-24) U:=U.cos2zxsinor (2-25) 在求和电路中相加,则得到磁头总输出电压为 U-U.sin2xor (2-26) 由上式可知,合成输出电压U的幅值恒定,而相位随磁头与磁尺的相对位置x变化 而变。读出输出信号的相位,就可确定磁头的位置。 第三节角位移检测传感器 一、旋转变压器 旋转变压器是一种利用电磁感应原理将转角变换为电压信号的传感器。由于它结构 简单,动作灵敏,对环境无特殊要求,输出信号大,抗干扰好,因此被广泛应用于机电 体化产品中。 (一)旋转变压器的构造和工作原理 旋转变压器在结构上与两相绕组式异步电机相似,由定子和转子组成。当从一定频 率(频率通常为400Hz、500z、1000Hz及5000Hz等几种)的激磁电压加于定子绕组 时,转子绕组的电压幅值与转子转角成正弦、余弦函数关系,或在一定转角范围内与转 角成正比关系。前一种旋转变压器称为正余弦旋转变压器,适用于大角位移的绝对测量: 后一种称为线性旋转变压器,适用于小角位移的相对测量。 图2一10正余弦变压器原理图 DD一激磁绕组DD一辅助绕组Z五一余弦输出绕组Z2一正弦输出绕组 如图2一10所示,旋转变压器一般做成两极电机的形式。在定子上有激磁绕组和辅助 绕组,它们的轴线相互成90°。在转子上有两个输出绕组一一正弦输出绕组和余弦输出绕 组,这两个绕组的轴线也互成90°,一般将其中一个绕组(如Z:、Z)短接。 (二)旋转变压器的测量方式 当定子绕组中分别通以幅值和频率相同、相位相差为90°的交变激磁电压时,便可 2-12
2-12 t x U U cos 2 1 = 0 sin (2—24) t x U U sin 2 2 = 0 cos (2—25) 在求和电路中相加,则得到磁头总输出电压为 = + t x U U 2 0 sin (2—26) 由上式可知,合成输出电压 U 的幅值恒定,而相位随磁头与磁尺的相对位置χ变化 而变。读出输出信号的相位,就可确定磁头的位置。 第三节 角位移检测传感器 一、旋转变压器 旋转变压器是一种利用电磁感应原理将转角变换为电压信号的传感器。由于它结构 简单,动作灵敏,对环境无特殊要求,输出信号大,抗干扰好,因此被广泛应用于机电 一体化产品中。 (一)旋转变压器的构造和工作原理 旋转变压器在结构上与两相绕组式异步电机相似,由定子和转子组成。当从一定频 率(频率通常为 400Hz、500Hz、1000Hz 及 5000Hz 等几种)的激磁电压加于定子绕组 时,转子绕组的电压幅值与转子转角成正弦、余弦函数关系,或在一定转角范围内与转 角成正比关系。前一种旋转变压器称为正余弦旋转变压器,适用于大角位移的绝对测量; 后一种称为线性旋转变压器,适用于小角位移的相对测量。 图 2—10 正余弦变压器原理图 D1D2—激磁绕组 D3D4—辅助绕组 Z1Z2—余弦输出绕组 Z3Z4—正弦输出绕组 如图 2—10 所示,旋转变压器一般做成两极电机的形式。在定子上有激磁绕组和辅助 绕组,它们的轴线相互成 90°。在转子上有两个输出绕组——正弦输出绕组和余弦输出绕 组,这两个绕组的轴线也互成 90°,一般将其中一个绕组(如 Z1、Z2)短接。 (二)旋转变压器的测量方式 当定子绕组中分别通以幅值和频率相同、相位相差为 90°的交变激磁电压时,便可 Z1 Z2 D D2 U1 D1 3 U 2 D4 Z3 U 3 Z4
在转子绕组中得到感应电势,根据线性叠加原理,值为激磁电压山和仍的感应电 势之和,即 U=Uusin o (2-27) U2=UacosaN (2-28) U3=kUisin 0+kUzsin(90+0)=kU cos(ot -0) (2-29) 式中 k=wh们一一旋转变压器的变压比: 州、2一一转子、定子绕组的匝数 可见,测得转子绕组感应电压的幅值和相位,可间接测得转子转角?的变化。 线性旋转变压器实际上也是正余弦旋转变压器,不同的是线性旋转变压器采用了特 定的变压比k和接线方式,如图2一11。这样使得在一定转角范围内(一般为士60°), 其输出电压和转子转角0成线性关系。此时输出电压为 U3=kU-8品0 (2-30) 根据此式,选定变压比k及允许的非线性度,则可推算出满足线性关系的转角范围 (图2一12)。如取k=0.54,非线性度不超过士0.1%,则转子转角范围可以达到士60°。 图2一11线性族转变压器原理图 图2一12转子转角0与输出电压U3的关系曲 二、光电编码器 光电编码器是一种码盘式角度一数字检测元件。它有两种基本类型:一种是增量式 编码器,一种是绝对式编码器。增量式编码器具有结构简单、价格低、精度易于保证等 2.13
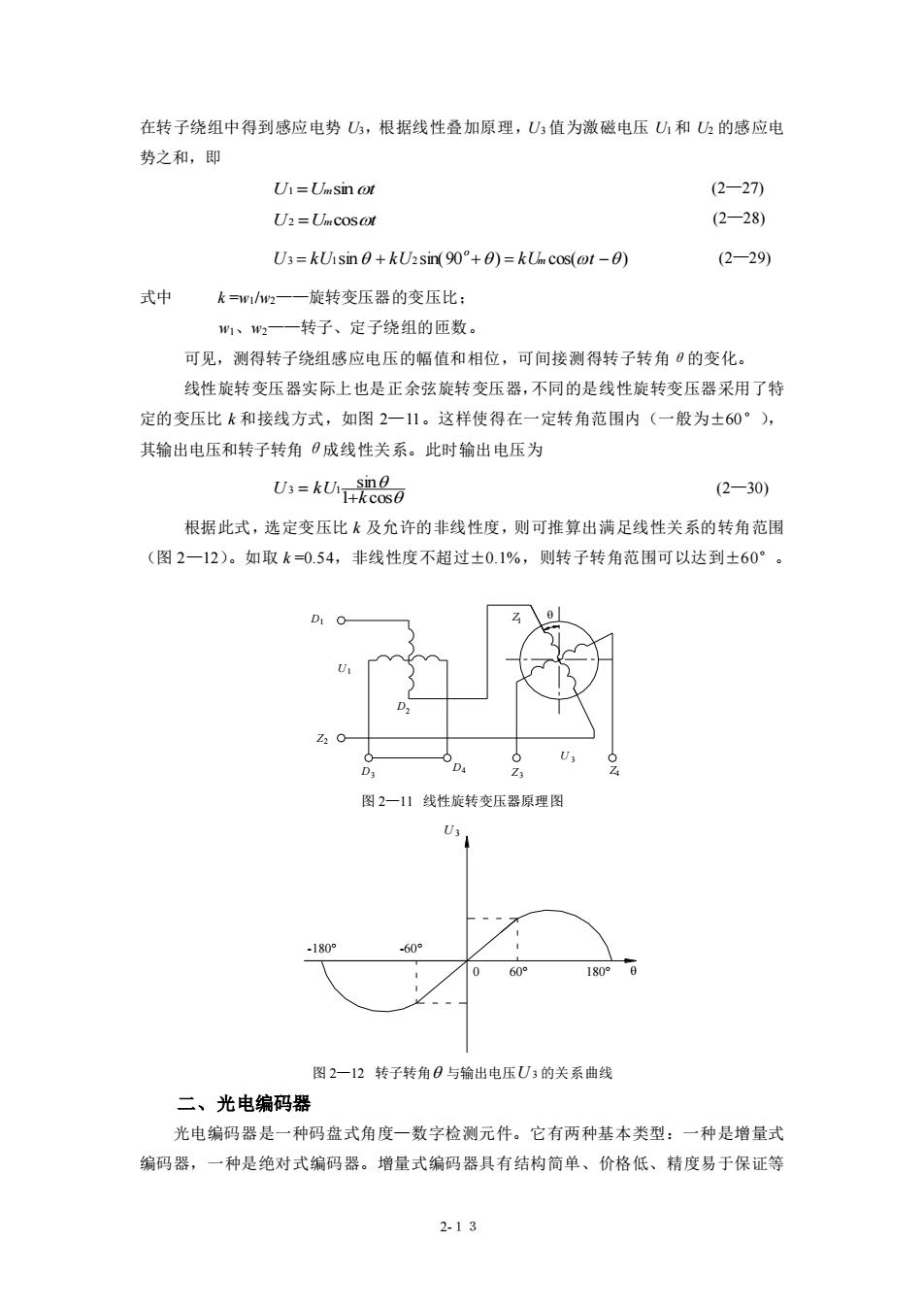
2-13 在转子绕组中得到感应电势 U3,根据线性叠加原理,U3 值为激磁电压 U1 和 U2 的感应电 势之和,即 U1 =Umsint (2—27) U2 =Umcost (2—28) U3 = k U1sin + k U2 sin(90 + ) = k Um cos(t − ) o (2—29) 式中 k =w1/w2——旋转变压器的变压比; w1、w2——转子、定子绕组的匝数。 可见,测得转子绕组感应电压的幅值和相位,可间接测得转子转角θ的变化。 线性旋转变压器实际上也是正余弦旋转变压器,不同的是线性旋转变压器采用了特 定的变压比 k 和接线方式,如图 2—11。这样使得在一定转角范围内(一般为±60°), 其输出电压和转子转角θ成线性关系。此时输出电压为 1 cos sin 3 1 k U kU + = (2—30) 根据此式,选定变压比 k 及允许的非线性度,则可推算出满足线性关系的转角范围 (图 2—12)。如取 k =0.54,非线性度不超过±0.1%,则转子转角范围可以达到±60°。 图 2—11 线性旋转变压器原理图 图 2—12 转子转角 与输出电压 U3 的关系曲线 二、光电编码器 光电编码器是一种码盘式角度—数字检测元件。它有两种基本类型:一种是增量式 编码器,一种是绝对式编码器。增量式编码器具有结构简单、价格低、精度易于保证等 D3 Z2 U1 D1 Z3 4 D2 D4 U 3 Z Z1 -180° -60° 0 60° U 3 180° θ
优点,所以目前采用最多。绝对式编码器能直接给出对应于每个转角的数字信息,便于 计算机处理,但当进给数大于一转时,须作特别处理,而且必须用减速齿轮将两个以上 的编码器连接起来,组成多级检测装置,使其结构复杂、成本高。 (一)增量式编码器 增量式编码器是指随转轴旋转的码盘给出一系列脉冲,然后根据旋转方向用计数器 对这些脉冲进行加减计数,以此来表示转过的角位移量。增量式编码器的工作原理如图 2-13所示。 生玛盘 光 光电变换 透镜 B 鉴向包 图2一13增量式编码器工作原理 它由主码盘、鉴向盘、光学系统和光电变换器组成。在图形的主码盘(光电盘)周 边上刻有节距相等的辐射状窄缝,形成均匀分布的透明区和不透明区。鉴向盘与主码盘 平行,并刻有a、b两组透明检测窄缝,它们彼此错开14节距,以使A、B两个光电变 换器的输出信号在相位上相差90°。工作时,鉴向盘静止不动,主码盘与转轴一起转动, 光源发出的光投射到主码盘与鉴向盘上。当主码盘上的不透明区正好与鉴向盘上的透明 窄缝对齐时,光线被全部遮住,光电变换器输出电压为最小:当主码盘上的透明区正好 与鉴向盘上的透明窄缝对齐时,光线全部通过,光电变换器输出电压为最大。主码盘每 转过一个刻线周期,光电变换器将输出一个近似的正弦波电压,且光电变换器A、B的 输出电压相位差为90°。经逻辑电路处理就可以测出被测轴的相对转角和转动方向。 利用增量式编码器还可以测量轴的转速。方法有两种,分别应用测量脉冲的频率和 周期的原理。 (二)、绝对式编码器 绝对式编码器是把被测转角通过读取码盘上的图案信息直接转换成相应代码的检测 元件。编码盘有光电式、接触式和电磁式三种。 光电式码盘是目前应用较多的一种,它是在透明材料的圆盘上精确地印制上二进制 编码。图2一14所示为四位二进制的码盘,码盘上各圈圆环分别代表一位二进制的数字 码道,在同一个码道上印制黑白等间隔图案,形成一套编码。黑色不透光区和白色透光 区分别代表二进制的“0”和“1”。在一个四位光电码盘上,有四圈数字码道,每一个码 道表示二进制的一位,里侧是高位,外侧是低位,在360°范围内可编数码数为24=16 个。 2.14
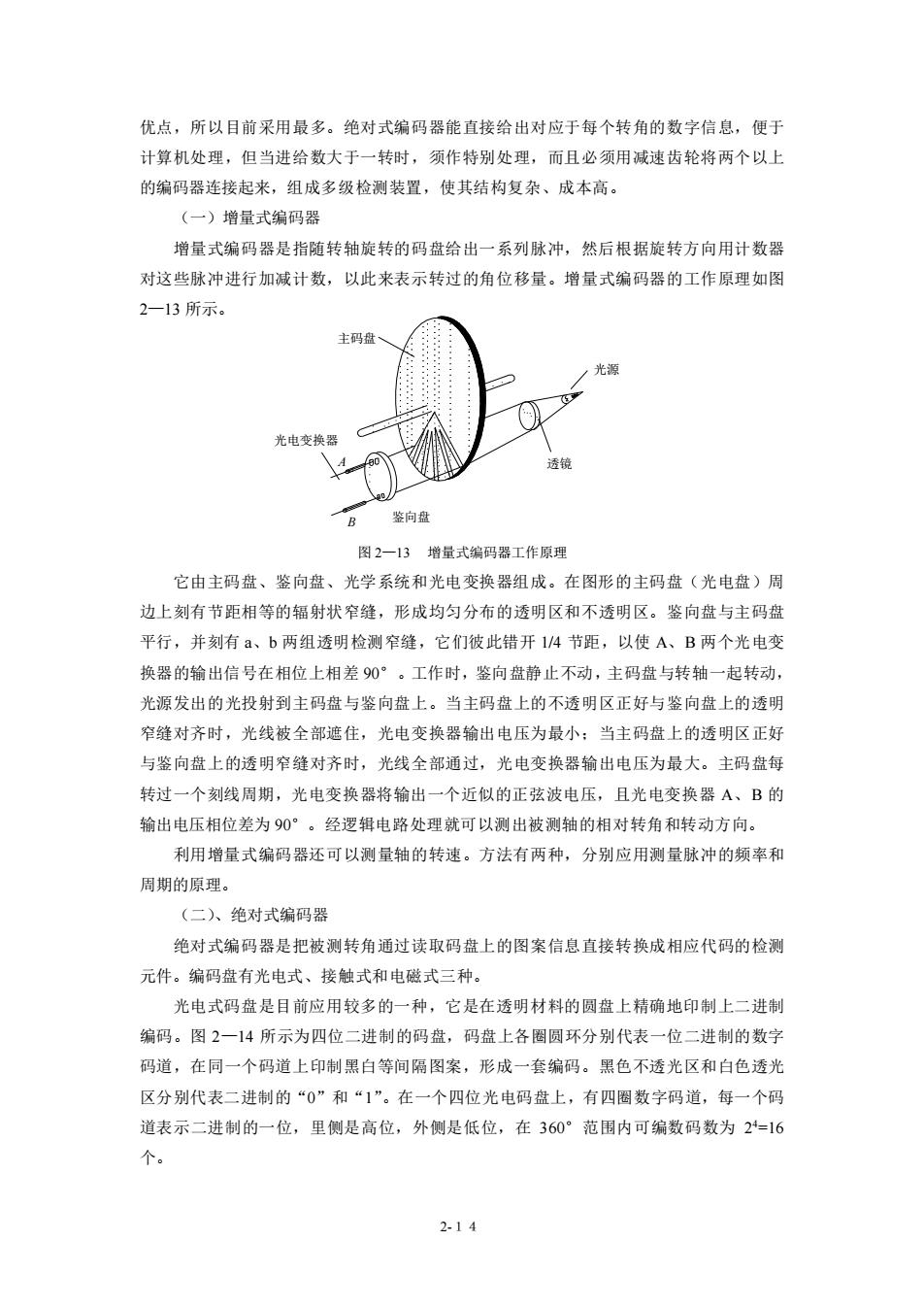
2-14 优点,所以目前采用最多。绝对式编码器能直接给出对应于每个转角的数字信息,便于 计算机处理,但当进给数大于一转时,须作特别处理,而且必须用减速齿轮将两个以上 的编码器连接起来,组成多级检测装置,使其结构复杂、成本高。 (一)增量式编码器 增量式编码器是指随转轴旋转的码盘给出一系列脉冲,然后根据旋转方向用计数器 对这些脉冲进行加减计数,以此来表示转过的角位移量。增量式编码器的工作原理如图 2—13 所示。 图 2—13 增量式编码器工作原理 它由主码盘、鉴向盘、光学系统和光电变换器组成。在图形的主码盘(光电盘)周 边上刻有节距相等的辐射状窄缝,形成均匀分布的透明区和不透明区。鉴向盘与主码盘 平行,并刻有 a、b 两组透明检测窄缝,它们彼此错开 1/4 节距,以使 A、B 两个光电变 换器的输出信号在相位上相差 90°。工作时,鉴向盘静止不动,主码盘与转轴一起转动, 光源发出的光投射到主码盘与鉴向盘上。当主码盘上的不透明区正好与鉴向盘上的透明 窄缝对齐时,光线被全部遮住,光电变换器输出电压为最小;当主码盘上的透明区正好 与鉴向盘上的透明窄缝对齐时,光线全部通过,光电变换器输出电压为最大。主码盘每 转过一个刻线周期,光电变换器将输出一个近似的正弦波电压,且光电变换器 A、B 的 输出电压相位差为 90°。经逻辑电路处理就可以测出被测轴的相对转角和转动方向。 利用增量式编码器还可以测量轴的转速。方法有两种,分别应用测量脉冲的频率和 周期的原理。 (二)、绝对式编码器 绝对式编码器是把被测转角通过读取码盘上的图案信息直接转换成相应代码的检测 元件。编码盘有光电式、接触式和电磁式三种。 光电式码盘是目前应用较多的一种,它是在透明材料的圆盘上精确地印制上二进制 编码。图 2—14 所示为四位二进制的码盘,码盘上各圈圆环分别代表一位二进制的数字 码道,在同一个码道上印制黑白等间隔图案,形成一套编码。黑色不透光区和白色透光 区分别代表二进制的“0”和“1”。在一个四位光电码盘上,有四圈数字码道,每一个码 道表示二进制的一位,里侧是高位,外侧是低位,在 360°范围内可编数码数为 2 4=16 个。 光电变换器 B 鉴向盘 A 主码盘 透镜 光源

图2一14四位二进制的码盘 工作时,码盘的一侧放置电源,另一边放置光电接受装置,每个码道都对应有一个 光电管及放大、整形电路。码盘转到不同位置,光电元件接受光信号,并转成相应的电 信号,经放大整形后,成为相应数码电信号。但由于制造和安装精度的影响,当码盘回 转在两码段交替过程中,会产生读数误差。例如,当码盘顺时针方向旋转,由位置“0111” 变为“1000”时,这四位数要同时都变化,可能将数码误读成16种代码中的任意一种, 如读成1111、101、1101、…0001等,产生了无法估计的很大的数值误差,这种误差称 非单值性误差。 为了消除非单值性误差,可采用以下的方法。 1循环码盘(或称格雷码盘) 图2一15四位二进制循环码盘 循环码习惯上又称格雷码,它也是一种二进制编码,只有“0”和“1”两个数。图 2一15所示为四位二进制循环码。这种编码的特点是任意相邻的两个代码间只有一位代 码有变化,即“0”变为“1”或“1”变为“0”。因此,在两数变换过程中,所产生的读 数误差最多不超过“1”,只可能读成相邻两个数中的一个数。所以,它是消除非单值性 误差的一种有效方法。 2.带判位光电装置的二进制循环码盘 这种码盘是在四位二讲制循环码盘的最外圈再增加一圈信号位。图2一16所示就是 215
2-15 图 2—14 四位二进制的码盘 工作时,码盘的一侧放置电源,另一边放置光电接受装置,每个码道都对应有一个 光电管及放大、整形电路。码盘转到不同位置,光电元件接受光信号,并转成相应的电 信号,经放大整形后,成为相应数码电信号。但由于制造和安装精度的影响,当码盘回 转在两码段交替过程中,会产生读数误差。例如,当码盘顺时针方向旋转,由位置“0111” 变为“1000”时,这四位数要同时都变化,可能将数码误读成 16 种代码中的任意一种, 如读成 1111、1011、1101、…0001 等,产生了无法估计的很大的数值误差,这种误差称 非单值性误差。 为了消除非单值性误差,可采用以下的方法。 1.循环码盘(或称格雷码盘) 图 2—15 四位二进制循环码盘 循环码习惯上又称格雷码,它也是一种二进制编码,只有“0”和“1”两个数。图 2—15 所示为四位二进制循环码。这种编码的特点是任意相邻的两个代码间只有一位代 码有变化,即“0”变为“1”或“1”变为“0”。因此,在两数变换过程中,所产生的读 数误差最多不超过“1”,只可能读成相邻两个数中的一个数。所以,它是消除非单值性 误差的一种有效方法。 2.带判位光电装置的二进制循环码盘 这种码盘是在四位二进制循环码盘的最外圈再增加一圈信号位。图 2—16 所示就是 1100 0011 0101 0110 0111 0100 1010 1001 1000 1011 1111 0001 0010 0000 1110 1101 1001 0111 1111 0100 0101 1100 1101 1110 1010 1011 0001 0110 0010 0010 0011 0000 1000