过一个条纹间距B,查看莫尔条纹的移动方向,即可确定主光播的移动方向 2莫尔条纹具有位移放大作用。莫尔条纹的间距B与两光栅条纹夹角0之间关系为 (2-6) 式中的单位为rad,B、W的单位为mm。所以莫尔条纹的放大倍数为 K=品日 (2-7) 可见日越小,放大倍数越大。实际应用中,角的取值范围都很小。例如当=10 时,K=/0=1/0.029rad≈345。也就是说指示光栅与标尺光栅相对移动一个很小的W距 离时,可以得到一个很大的莫尔条纹移动量B,可以用测量条纹的移动来检测光栅微小 的位移,从而实现高灵敏度的位移测量。 3莫尔条纹具有平均光误差的作用。莫尔条纹是由一系列刻线的交点组成,它反 映了形成条纹的光栖刻线的平均位置,对各橱距误差起了平均作用,减弱了光栅制造中 的局部误差和短周期误差对检测精度的影响。 通过光电元件,可将莫尔条纹移动时光强的变化转换为近似正弦变化的电信号,如 图2一4所示。其电压: U=Uo+Uasin (2-8) 式中 6—一输出信号的直流分量 U 一输出信号的幅值: 两光栅的相对位移。 Uo 3m2 2W 图2一4光桶输出波形 将此电压信号放大、整形变换为方波,经微分转换为脉冲信号,再经辨向电路和可 逆计数器计数,则可用数字形式显示出位移量,位移量等于脉冲与栅距乘积。测量分辨 率等于栅距。 提高测量分辨率的常用方法是细分,且电子细分应用较广。这样可在光相对移动 一个栅距的位移(即电压波形在一个周期内)时,得到4个计数脉冲,将分辨率提高4 倍,这就是通常说的电子4倍频细分。 二、感应同步器 感应同步器是利用电磁感应原理把两个平面绕组间的位移量转换成电信号的一种位 移传感器。按测量机械位移的对象不同可分为直线型和圆盘型两类,分别用来检测直线 2-6
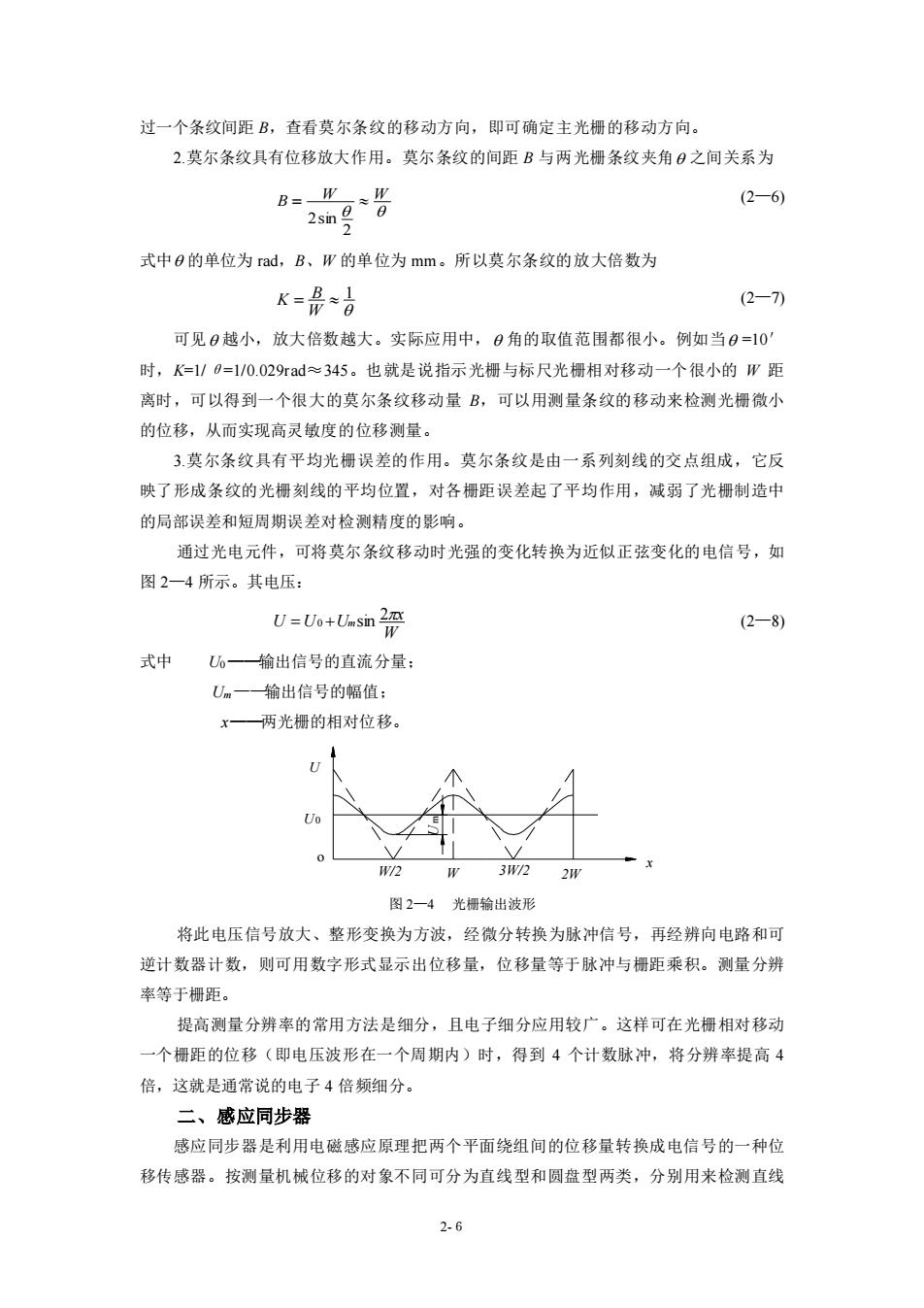
2-6 过一个条纹间距 B,查看莫尔条纹的移动方向,即可确定主光栅的移动方向。 2.莫尔条纹具有位移放大作用。莫尔条纹的间距 B 与两光栅条纹夹角 之间关系为 B = W W 2 2sin (2—6) 式中 的单位为 rad,B、W 的单位为 mm。所以莫尔条纹的放大倍数为 1 = W B K (2—7) 可见 越小,放大倍数越大。实际应用中, 角的取值范围都很小。例如当 =10′ 时,K=1/θ=1/0.029rad≈345。也就是说指示光栅与标尺光栅相对移动一个很小的 W 距 离时,可以得到一个很大的莫尔条纹移动量 B,可以用测量条纹的移动来检测光栅微小 的位移,从而实现高灵敏度的位移测量。 3.莫尔条纹具有平均光栅误差的作用。莫尔条纹是由一系列刻线的交点组成,它反 映了形成条纹的光栅刻线的平均位置,对各栅距误差起了平均作用,减弱了光栅制造中 的局部误差和短周期误差对检测精度的影响。 通过光电元件,可将莫尔条纹移动时光强的变化转换为近似正弦变化的电信号,如 图 2—4 所示。其电压: W x U U Um 2 = 0 + sin (2—8) 式中 U0——输出信号的直流分量; Um——输出信号的幅值; x——两光栅的相对位移。 图 2—4 光栅输出波形 将此电压信号放大、整形变换为方波,经微分转换为脉冲信号,再经辨向电路和可 逆计数器计数,则可用数字形式显示出位移量,位移量等于脉冲与栅距乘积。测量分辨 率等于栅距。 提高测量分辨率的常用方法是细分,且电子细分应用较广。这样可在光栅相对移动 一个栅距的位移(即电压波形在一个周期内)时,得到 4 个计数脉冲,将分辨率提高 4 倍,这就是通常说的电子 4 倍频细分。 二、感应同步器 感应同步器是利用电磁感应原理把两个平面绕组间的位移量转换成电信号的一种位 移传感器。按测量机械位移的对象不同可分为直线型和圆盘型两类,分别用来检测直线 U0 U W/2 o Um W 3W/2 2W x
位移和角位移。由于它成本低,受环境温度影响小,测量精度高,且为非接触测量,所 以在位移检测中得到广泛应用,特别是在各种机床的位移数字显示、自动定位和数控系 统中。 (一)感应同步器的结构 直线型感应同步器由定尺和滑尺两部分组成,如图2一5所示。图2一6为直线型感 应同步器定尺和滑尺的结构。其制造工艺是先在基板(玻璃或金属)上涂上一层绝缘粘 合材料,将铜箔粘牢,用制造印刷线路板的腐蚀方法制成节距T一般为2mm的方齿形线 圈。定尺绕组是连续的。滑尺上分布着两个励磁绕组,分别称为正弦绕组和余弦绕组。 当正弦绕组与定尺绕组相位相同时,余弦绕组与定尺绕组错开1/4节距。滑尺和定尺相 对平行安装,其间保持一定间隙(0.05-0.2mm)。 (二)感应同步器的工作原理 在滑尺的正弦绕组中,施加频率为∫(一般为2~1OkHz)的交变电流时,定尺绕组感 应出频率为∫的感应电势。感应电势的大小与滑尺和定尺的相对位置有关。当两绕组同 向对齐时,滑尺绕组磁通全部交链于定尺绕组,所以其感应电势为正向最大。移动14 节距后,两绕组磁通不交链,即交链磁通量为零:再移动4节距后,两绕组反向时, 感应电势负向最大。依次类推,每移动一节距,周期性的重复变化一次,其感应电势随 位置按余弦规律变化,见图2一7a。 图2一5直线型感应同步器的组成 1一定尺2一滑尺 滑尺 图2一6直线型威应同步器定尺、滑尺的结相
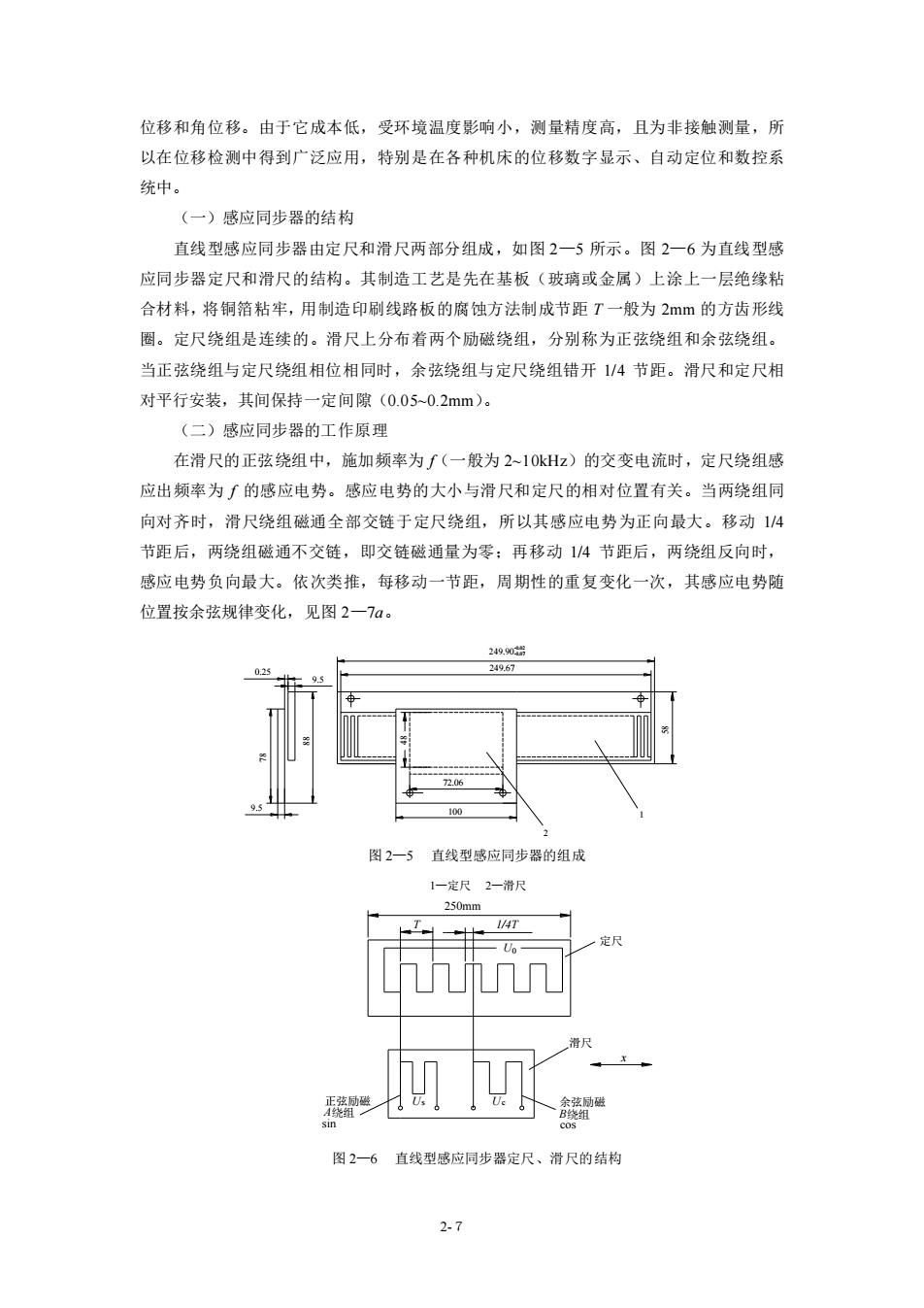
2-7 位移和角位移。由于它成本低,受环境温度影响小,测量精度高,且为非接触测量,所 以在位移检测中得到广泛应用,特别是在各种机床的位移数字显示、自动定位和数控系 统中。 (一)感应同步器的结构 直线型感应同步器由定尺和滑尺两部分组成,如图 2—5 所示。图 2—6 为直线型感 应同步器定尺和滑尺的结构。其制造工艺是先在基板(玻璃或金属)上涂上一层绝缘粘 合材料,将铜箔粘牢,用制造印刷线路板的腐蚀方法制成节距 T 一般为 2mm 的方齿形线 圈。定尺绕组是连续的。滑尺上分布着两个励磁绕组,分别称为正弦绕组和余弦绕组。 当正弦绕组与定尺绕组相位相同时,余弦绕组与定尺绕组错开 1/4 节距。滑尺和定尺相 对平行安装,其间保持一定间隙(0.05~0.2mm)。 (二)感应同步器的工作原理 在滑尺的正弦绕组中,施加频率为 f(一般为 2~10kHz)的交变电流时,定尺绕组感 应出频率为 f 的感应电势。感应电势的大小与滑尺和定尺的相对位置有关。当两绕组同 向对齐时,滑尺绕组磁通全部交链于定尺绕组,所以其感应电势为正向最大。移动 1/4 节距后,两绕组磁通不交链,即交链磁通量为零;再移动 1/4 节距后,两绕组反向时, 感应电势负向最大。依次类推,每移动一节距,周期性的重复变化一次,其感应电势随 位置按余弦规律变化,见图 2—7a。 图 2—5 直线型感应同步器的组成 1—定尺 2—滑尺 图 2—6 直线型感应同步器定尺、滑尺的结构 249.67 249.90 9.5 78 0.25 88 48 100 72.06 9.5 2 1 58 -0.02 -0.07 sin 正弦励磁 A绕组 Us Uc 250mm T 1/4T U0 余弦励磁 B绕组 cos 滑尺 x 定尺

图2一7定尺感应电势波形图 )仅对A绕组徽磁 b)仅对B绕组激磁 同样,若在滑尺的余弦绕组中,施加频率为∫的交变电流时,定尺绕组上也感应出 频率为∫的感应电势。其感应电势随位置按正弦规伸变化。见图2一b。设正弦绕组供电 电压为U,余弦绕组供电电压为U,移动距离为x,节距为T,则正弦绕组单独供电时, 在定尺上感应电势为 (2-9) 余弦绕组单独供电所产生的感应电势为 U=KUesin于360°=KUesin0 (2-10) 由于感应同步器的磁路系统可视为线性,可进行线性叠加,所以定尺上总的感应电势为 U2=U2+U2=KUcos0+KUesin 0 (2-1) 式中K—定尺与滑尺之间的耦合系数: 日一一定尺与滑尺相对位移的角度表示量(电角度): 0=(5)360°=20 T一一节距,表示直线感应同步器的周期,标准式直线感应同步器的节距为 2mm。 感应同步器是利用感应电压的变化来进行位置检测的。根据对滑尺绕组供电方式的 不同,以及对输出电压检测方式的不同,感应同步器的测量方式有相位和幅值两种工作 法,前者是通过检测感应电压的相位来测量位移,后者是通过检测感应电压的幅值来测 量位移。 (三)测量方法 1相位工作法 当滑尺的两个励磁绕组分别施加相同频率和相同幅值,但相位相差90°的两个电压 时,定尺感应电势相应随滑尺位置而变。设 U.=Uasin or (2-12)
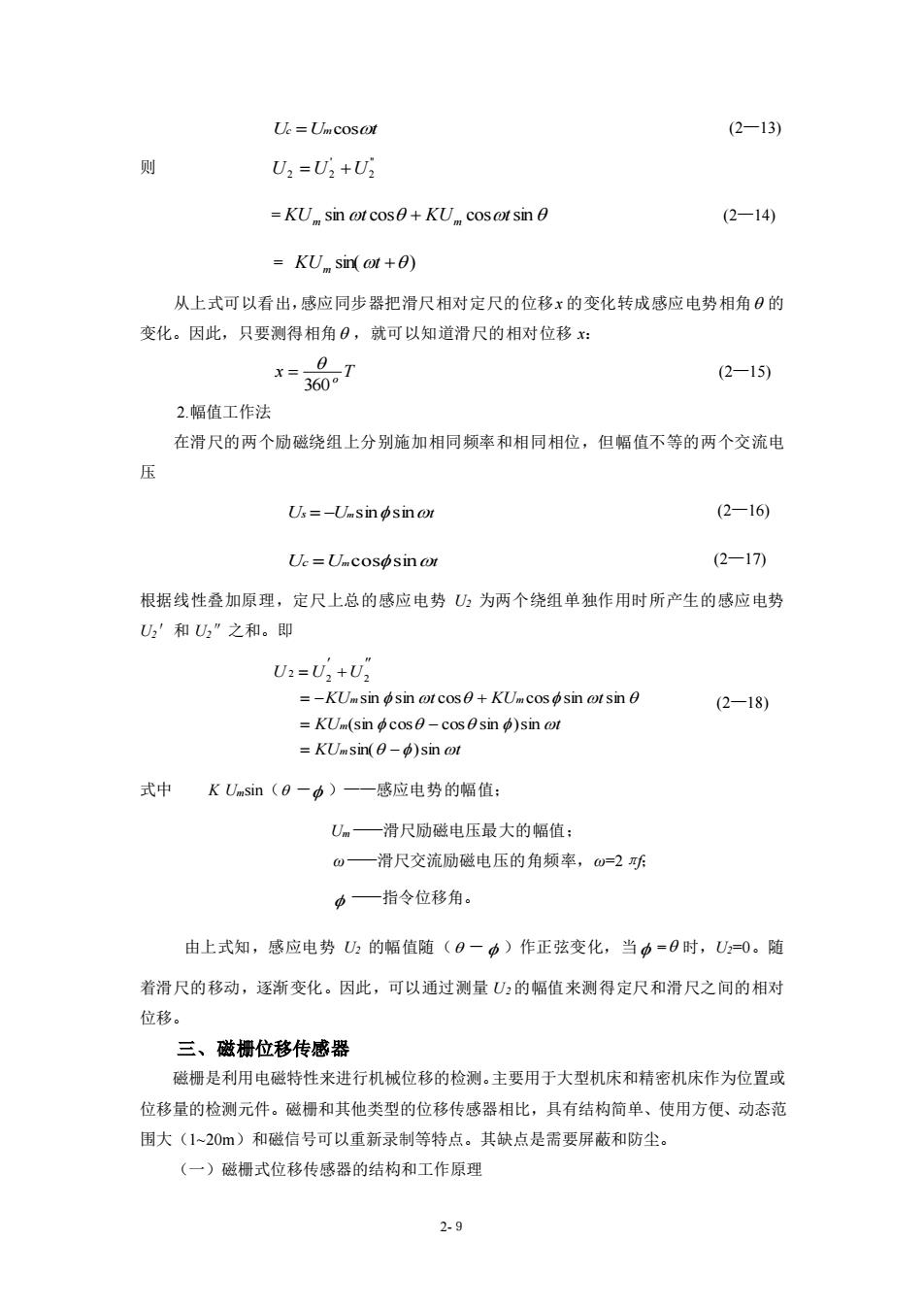
2-8 图 2—7 定尺感应电势波形图 a)仅对 A 绕组激磁 b)仅对 B 绕组激磁 同样,若在滑尺的余弦绕组中,施加频率为 f 的交变电流时,定尺绕组上也感应出 频率为 f 的感应电势。其感应电势随位置按正弦规律变化。见图 2—7b。设正弦绕组供电 电压为 Us,余弦绕组供电电压为 Uc,移动距离为 x,节距为 T,则正弦绕组单独供电时, 在定尺上感应电势为 2 s cos 360 KUs cos T x U = KU = ' o (2—9) 余弦绕组单独供电所产生的感应电势为 2 c sin 360 KUc sin T x U = KU = " o (2—10) 由于感应同步器的磁路系统可视为线性,可进行线性叠加,所以定尺上总的感应电势为 cos sin 2 2 U2 =U +U = KUs + KUc ' " (2—11) 式中 K——定尺与滑尺之间的耦合系数; ——定尺与滑尺相对位移的角度表示量(电角度); T x T x 2 = ( )360 = o T——节距,表示直线感应同步器的周期,标准式直线感应同步器的节距为 2mm。 感应同步器是利用感应电压的变化来进行位置检测的。根据对滑尺绕组供电方式的 不同,以及对输出电压检测方式的不同,感应同步器的测量方式有相位和幅值两种工作 法,前者是通过检测感应电压的相位来测量位移,后者是通过检测感应电压的幅值来测 量位移。 (三)测量方法 1.相位工作法 当滑尺的两个励磁绕组分别施加相同频率和相同幅值,但相位相差 90o 的两个电压 时,定尺感应电势相应随滑尺位置而变。设 Us =Umsint (2—12) 感应电势 节距 a) x U 2 感应电势 节距 b) x U 2
(2-13) U,=U,+U; =KU sin ct cos+KU cosatsin (2-14) KU sin(ot+0) 从上式可以看出,感应同步器把滑尺相对定尺的位移x的变化转成感应电势相角日的 变化。因此,只要测得相角日,就可以知道滑尺的相对位移x: (2-15) 2.幅值工作法 在滑尺的两个励磁绕组上分别施加相同频率和相同相位,但幅值不等的两个交流电 Us=-Usingsino (2-16) (2-17 根据线性叠加原理,定尺上总的感应电势山为两个绕组单独作用时所产生的感应电势 '和山”之和。即 U2=U:+0: =-KUm sin sin ot cos+KUm cososin otsin (2-18) =KUm(sin cos-cos0sin d)sin ot =KUmsin()sin 式中K Usin(0一中)一一感应电势的幅值: U。一滑尺励磁电压最大的幅值: —滑尺交流励磁电压的角频率,=2 中—指令位移角。 由上式知,感应电势仍的幅值随(0一中)作正弦变化,当中=0时,U=0。随 着滑尺的移动,逐渐变化。因此,可以通过测量的幅值来测得定尺和滑尺之间的相对 位移。 三、磁栅位移传感器 磁栅是利用电磁特性来进行机械位移的检测。主要用于大型机床和精密机床作为位置或 位移量的检测元件。磁栅和其他类型的位移传感器相比,具有结构简单、使用方便、动态范 围大(1~20m)和磁信号可以重新录制等特点。其缺点是需要屏蔽和防尘。 (一)磁栅式位移传感器的结构和工作原理 29
2-9 Uc =Um cost (2—13) 则 " 2 ' U2 = U2 +U = KUm sin t cos + KUm costsin (2—14) = KU sin(t +) m 从上式可以看出,感应同步器把滑尺相对定尺的位移x 的变化转成感应电势相角 的 变化。因此,只要测得相角 ,就可以知道滑尺的相对位移 x: x T o 360 = (2—15) 2.幅值工作法 在滑尺的两个励磁绕组上分别施加相同频率和相同相位,但幅值不等的两个交流电 压 Us = −Um sin sint (2—16) Uc =Um cos sint (2—17) 根据线性叠加原理,定尺上总的感应电势 U2 为两个绕组单独作用时所产生的感应电势 U2′和 U2″之和。即 KU t KU t KU t KU t U U U m m m m sin( )sin (sin cos cos sin )sin sin sin cos cos sin sin 2 2 2 = − = − = − + = + ' " (2—18) 式中 K Umsin( - )——感应电势的幅值; Um——滑尺励磁电压最大的幅值; ω——滑尺交流励磁电压的角频率,ω=2πf; ——指令位移角。 由上式知,感应电势 U2 的幅值随( - )作正弦变化,当 = 时,U2=0。随 着滑尺的移动,逐渐变化。因此,可以通过测量 U2 的幅值来测得定尺和滑尺之间的相对 位移。 三、磁栅位移传感器 磁栅是利用电磁特性来进行机械位移的检测。主要用于大型机床和精密机床作为位置或 位移量的检测元件。磁栅和其他类型的位移传感器相比,具有结构简单、使用方便、动态范 围大(1~20m)和磁信号可以重新录制等特点。其缺点是需要屏蔽和防尘。 (一)磁栅式位移传感器的结构和工作原理
磁栅式位移传感器的结构原理如图2一8所示。它由磁尺(磁橘)入、磁头和检测电路等 部分组成。磁尺是采用录破的方法,在一根基体表面涂有磁性膜的尺子上,记录下一定 波长的磁化信号,以此作为基准刻度标尺。磁头把磁栅上的磁信号检测出来并转换成电 信号。检测电路主要用来供给磁头激励电压和磁头检测到的信号转换为脉冲信号输出。 磁尺是在非导磁材料如铜、不锈钢、玻璃或其它合金材料的基体上,涂敷、化学沉 积或电镀上一层1020Hm厚的硬磁性材料(如NM一Co一P或Fe一Co合金),并在它的 表面上录制相等节距周期变化的磁信号。磁信号的节距一般为0.05、0.1、0.2、1mm。为 了防止磁头对磁性膜的磨损,通常在磁性膜上涂一层12“m的耐磨塑料保护层。 的 NN 图2一8磁棚工作原理 1一磁性膜2一基体3一酷尺4一熙头5一铁芯6一简磁绕组7一粉碳绕组 磁栅按用途分为长磁栅与圆磁栅两种。长磁栅用于直线位移测量,圆磁用于角位 移测量。 磁头是进行磁一电转换的变换器,它把反映空间位置的磁信号转换为电信号输送到 检测电路中去。普通录音机、磁带机的磁头是速度响应型磁头,其输出电压幅值与磁通 变化率成正比,只有当磁头与磁带之间有一定相对速度时才能读取磁化信号,所以这种 磁头只能用于动态测量,而不用于位置检测。为了在低速运动和静止时也能进行位置检 测,必须采用磁通响应型磁头。 磁通响应型磁头是利用带可饱和铁芯的磁性调制器原理制成的,其结构如图2一8 所示。在用软磁材料制成的铁芯上绕有两个绕组,一个为励磁绕组,另一个为拾磁绕组, 这两个绕组均由两段绕向相反并绕在不同的铁芯臂上的绕组串联而成。将高频励磁电流 通入励磁绕组时,在磁头上产生磁通中1,当磁头靠近磁尺时,磁尺上的磁信号产生的磁 通中,进入磁头铁芯,并被高频励磁电流所产生的磁通中1所调制。于是在拾磁线圈中感 应电压为 U=Uosin (2-19 式中 一一输出电压系数: 入一一磁尺上磁化信号的节距: 2-10
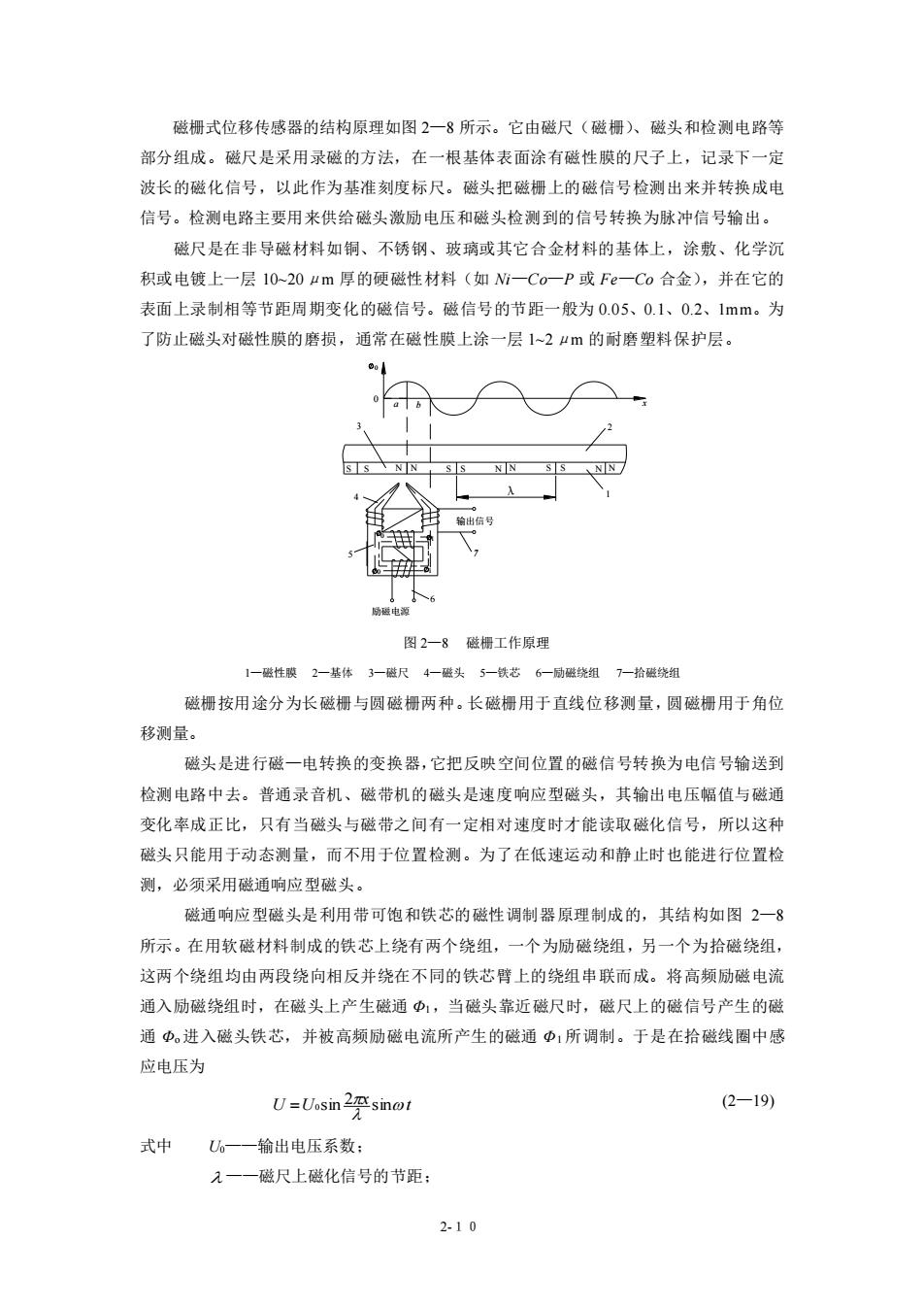
2-10 磁栅式位移传感器的结构原理如图 2—8 所示。它由磁尺(磁栅)、磁头和检测电路等 部分组成。磁尺是采用录磁的方法,在一根基体表面涂有磁性膜的尺子上,记录下一定 波长的磁化信号,以此作为基准刻度标尺。磁头把磁栅上的磁信号检测出来并转换成电 信号。检测电路主要用来供给磁头激励电压和磁头检测到的信号转换为脉冲信号输出。 磁尺是在非导磁材料如铜、不锈钢、玻璃或其它合金材料的基体上,涂敷、化学沉 积或电镀上一层 10~20μm 厚的硬磁性材料(如 Ni—Co—P 或 Fe—Co 合金),并在它的 表面上录制相等节距周期变化的磁信号。磁信号的节距一般为 0.05、0.1、0.2、1mm。为 了防止磁头对磁性膜的磨损,通常在磁性膜上涂一层 1~2μm 的耐磨塑料保护层。 图 2—8 磁栅工作原理 1—磁性膜 2—基体 3—磁尺 4—磁头 5—铁芯 6—励磁绕组 7—拾磁绕组 磁栅按用途分为长磁栅与圆磁栅两种。长磁栅用于直线位移测量,圆磁栅用于角位 移测量。 磁头是进行磁—电转换的变换器,它把反映空间位置的磁信号转换为电信号输送到 检测电路中去。普通录音机、磁带机的磁头是速度响应型磁头,其输出电压幅值与磁通 变化率成正比,只有当磁头与磁带之间有一定相对速度时才能读取磁化信号,所以这种 磁头只能用于动态测量,而不用于位置检测。为了在低速运动和静止时也能进行位置检 测,必须采用磁通响应型磁头。 磁通响应型磁头是利用带可饱和铁芯的磁性调制器原理制成的,其结构如图 2—8 所示。在用软磁材料制成的铁芯上绕有两个绕组,一个为励磁绕组,另一个为拾磁绕组, 这两个绕组均由两段绕向相反并绕在不同的铁芯臂上的绕组串联而成。将高频励磁电流 通入励磁绕组时,在磁头上产生磁通 Φ1,当磁头靠近磁尺时,磁尺上的磁信号产生的磁 通 Φo 进入磁头铁芯,并被高频励磁电流所产生的磁通 Φ1 所调制。于是在拾磁线圈中感 应电压为 t U U x sin 2 = 0 sin (2—19) 式中 U0——输出电压系数; ——磁尺上磁化信号的节距; 输出信号 励磁电源 0 1 6 5 0 4 S S 3 1 N N S S S λ 7 N N 1 S N N 2 0 0 a b x