m0 图8数据采集原理 (2)数据点云的预处理技术 接触式测量要对数据点云进行半径补偿:去除误差点:对点云数据进 行精简: (3)三维重构基本方法 对于复杂曲面产品来说,其实体模型可由曲面模型经过一定的计算演 变而来,因此曲面重构是复杂产品逆向工程的关键: (4)曲线曲面光顺技术 (5)逆向工程的误差分析与品质分析 二、实验目的及内容 1.实验目的 (1)了解反求技术的基本流程. (2)通过完成一个产品的三维表面数据的测量和反求产品的三维模型,了解 三维表面轮廓数据测量的方法以及反求设计流程 (3)了解基于CAD系统直接建模和利用相关设备进行反求建模的特点和应用 场合
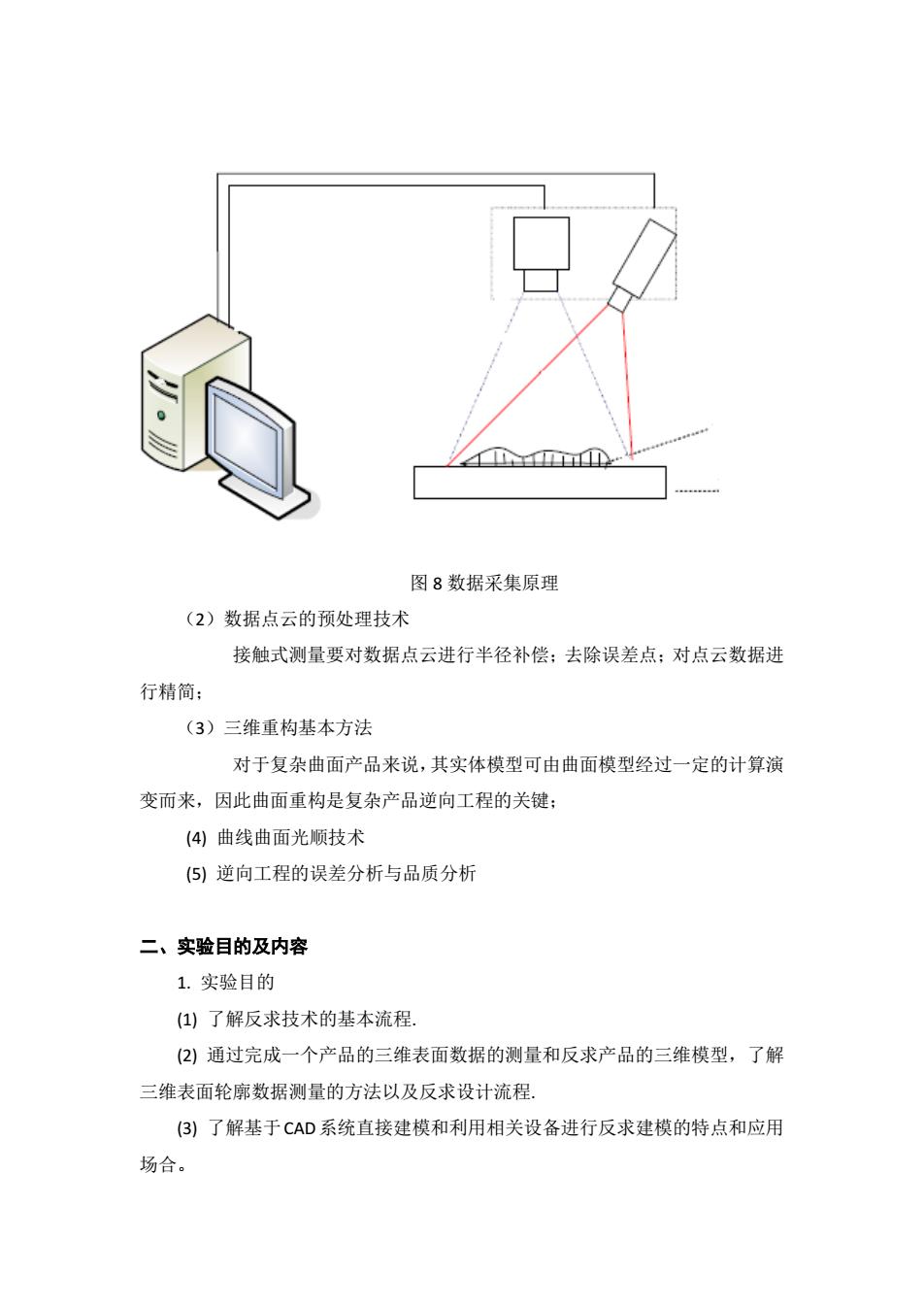
图 8 数据采集原理 (2)数据点云的预处理技术 接触式测量要对数据点云进行半径补偿;去除误差点;对点云数据进 行精简; (3)三维重构基本方法 对于复杂曲面产品来说,其实体模型可由曲面模型经过一定的计算演 变而来,因此曲面重构是复杂产品逆向工程的关键; (4) 曲线曲面光顺技术 (5) 逆向工程的误差分析与品质分析 二、实验目的及内容 1. 实验目的 (1) 了解反求技术的基本流程. (2) 通过完成一个产品的三维表面数据的测量和反求产品的三维模型,了解 三维表面轮廓数据测量的方法以及反求设计流程. (3) 了解基于CAD系统直接建模和利用相关设备进行反求建模的特点和应用 场合
2.实验内容 (1)运用面结构光三维测量系统对零件进行测量,并用Geomagic软件对其 进行拼合。 (2)以反求技术得到的零件三维点云数据为基础,在UG中对其进行后续的 三维造型 三、实验仪器、设备 1.仪器设备 面结构光三维测量系统:安装了UG、Geomagic等软件的电脑若干台, 2.点云数据 用三维测量系统采集得到的点云原始数据文件。塑料件/锻造件/俦造件样品 若干及其二维图纸。 四、实验方法和步骤 本实验分为两部分: 第一部分:运用面结构光三维测量系统对零件进行测量,并用Geomagic软 件对其拼合。 第二部分:由零件的点云文件,用UG的建模模块反求来构建零件的三维模 型。 第一部分实验方法和步骤 1.将装有PowerScaner软件的电脑与面结构光系统的设备安装连接好。 2.打开PowerScaner软件,对光学测量系统进行标定(标定方法见下图)
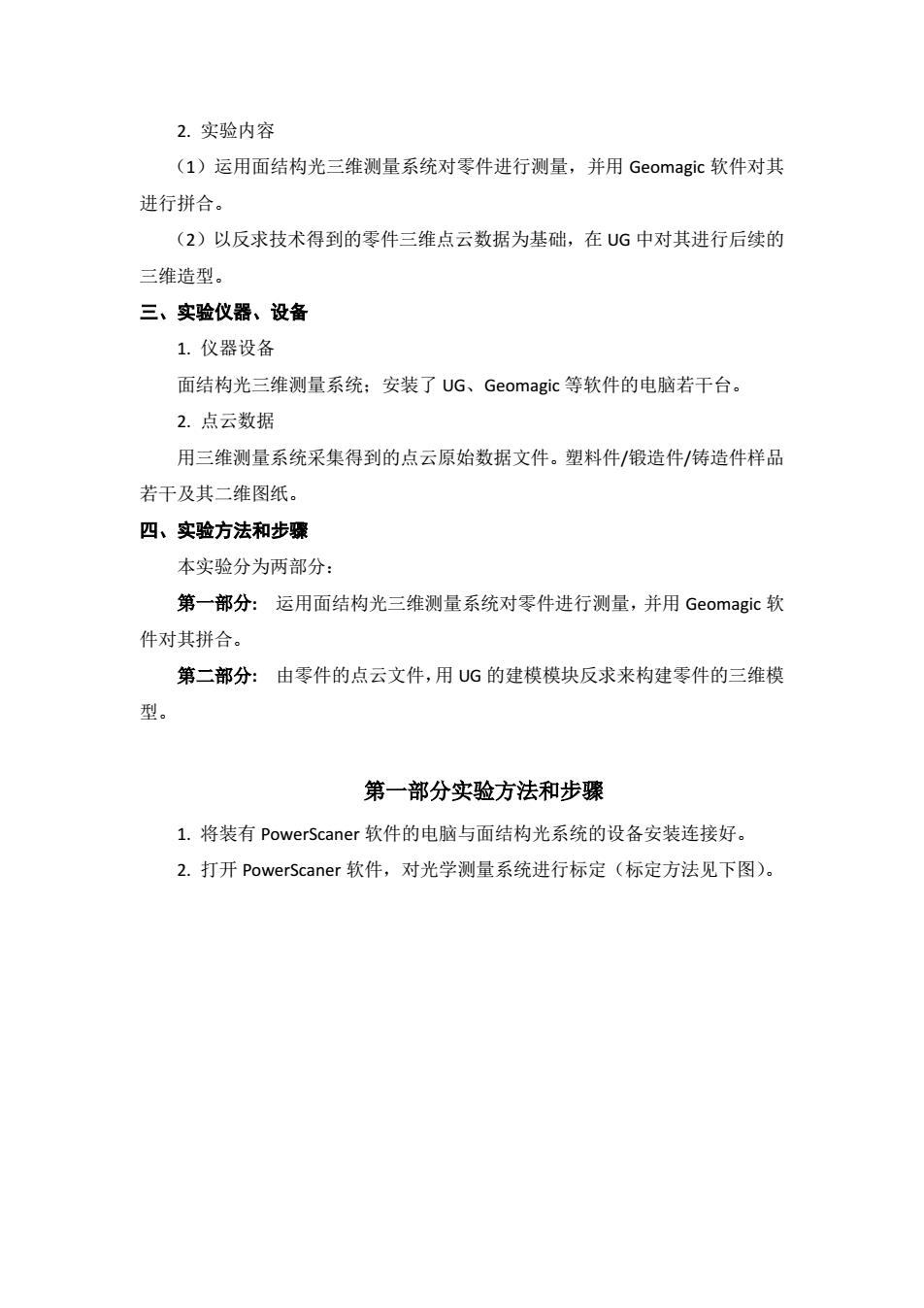
2. 实验内容 (1)运用面结构光三维测量系统对零件进行测量,并用 Geomagic 软件对其 进行拼合。 (2)以反求技术得到的零件三维点云数据为基础,在 UG 中对其进行后续的 三维造型。 三、实验仪器、设备 1. 仪器设备 面结构光三维测量系统;安装了 UG、Geomagic 等软件的电脑若干台。 2. 点云数据 用三维测量系统采集得到的点云原始数据文件。塑料件/锻造件/铸造件样品 若干及其二维图纸。 四、实验方法和步骤 本实验分为两部分: 第一部分: 运用面结构光三维测量系统对零件进行测量,并用 Geomagic 软 件对其拼合。 第二部分: 由零件的点云文件,用 UG 的建模模块反求来构建零件的三维模 型。 第一部分实验方法和步骤 1. 将装有 PowerScaner 软件的电脑与面结构光系统的设备安装连接好。 2. 打开 PowerScaner 软件,对光学测量系统进行标定(标定方法见下图)
相机 淀板正对相机 定版正对相机 豆 韩 之,并且标定板正对投影仪。 3.标定完成后,点击莱单栏“三维测量”下面的“图像预览”按钮,即可以 在屏幕上看见被测物体的预览图像,根据预览,将被测物体置于中心位置
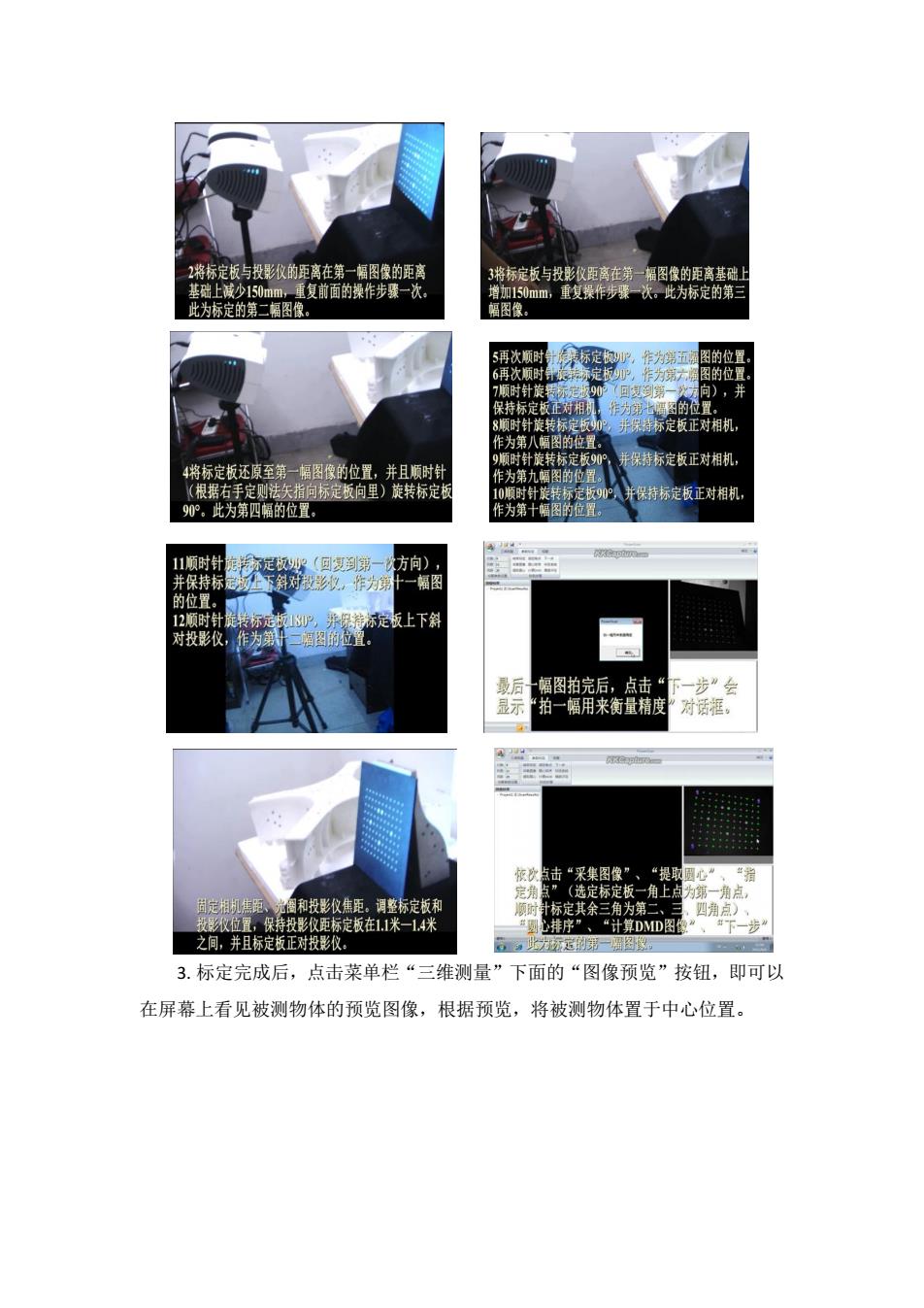
3. 标定完成后,点击菜单栏“三维测量”下面的“图像预览”按钮,即可以 在屏幕上看见被测物体的预览图像,根据预览,将被测物体置于中心位置
4.点击“新建工程”,输入新建工程名称路经。测量所有的文件将保存在此 路经。 建工程 新建工程名称:Project 透择像存路径C:ScanRes.ts 导入标志点数报」 确定☐取消 5.点击“三维测量”,开始进行数据采集,此时软件中的主视图框中会显示 出测量的图像。 6.点击确认当前数据,即可在左侧的“测量结果”工具条中显示出相应的结 果名称、路径,并将测量数据存入设置好的本地路径文件夹中
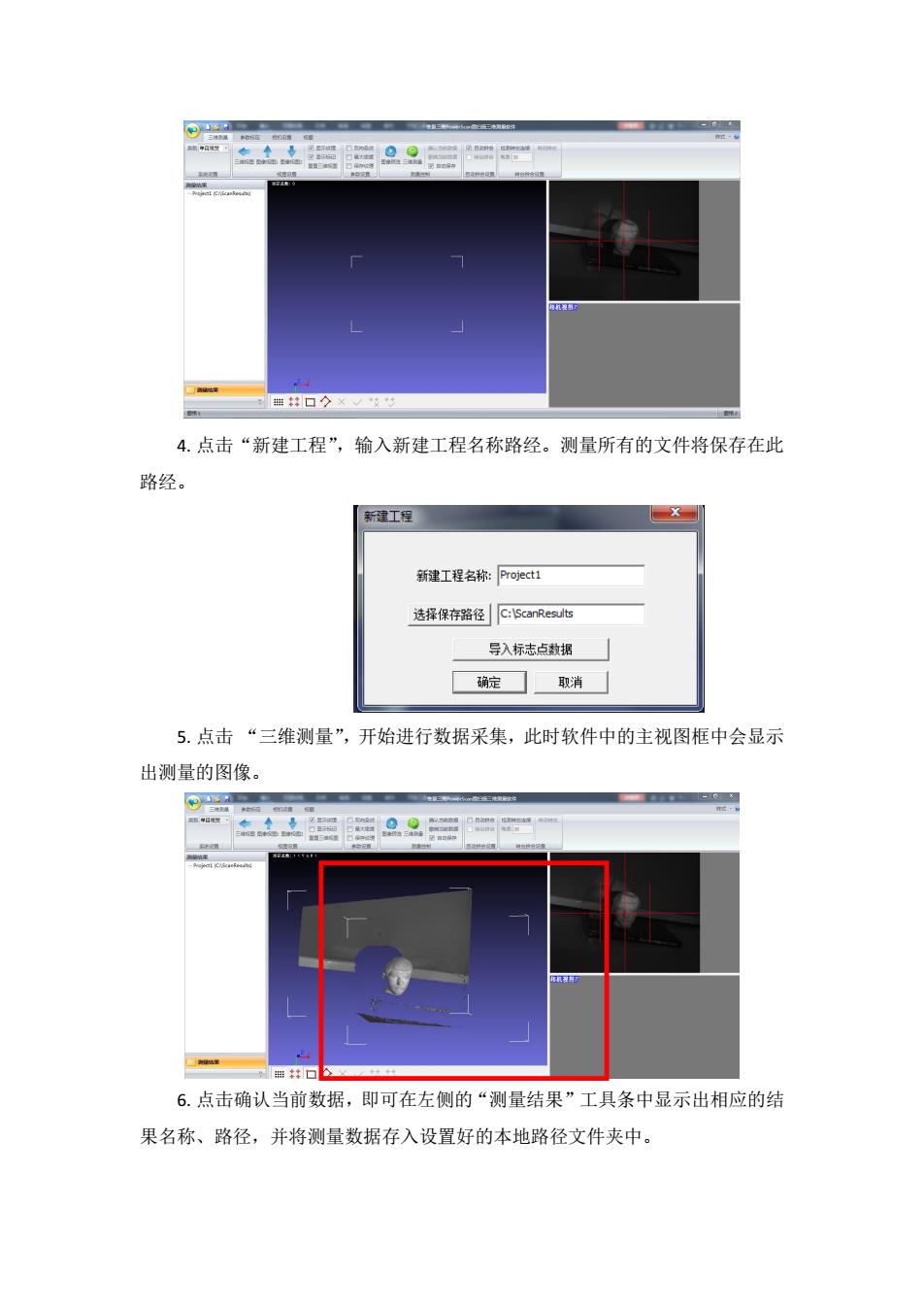
4. 点击“新建工程”,输入新建工程名称路经。测量所有的文件将保存在此 路经。 5. 点击 “三维测量”,开始进行数据采集,此时软件中的主视图框中会显示 出测量的图像。 6. 点击确认当前数据,即可在左侧的“测量结果”工具条中显示出相应的结 果名称、路径,并将测量数据存入设置好的本地路径文件夹中
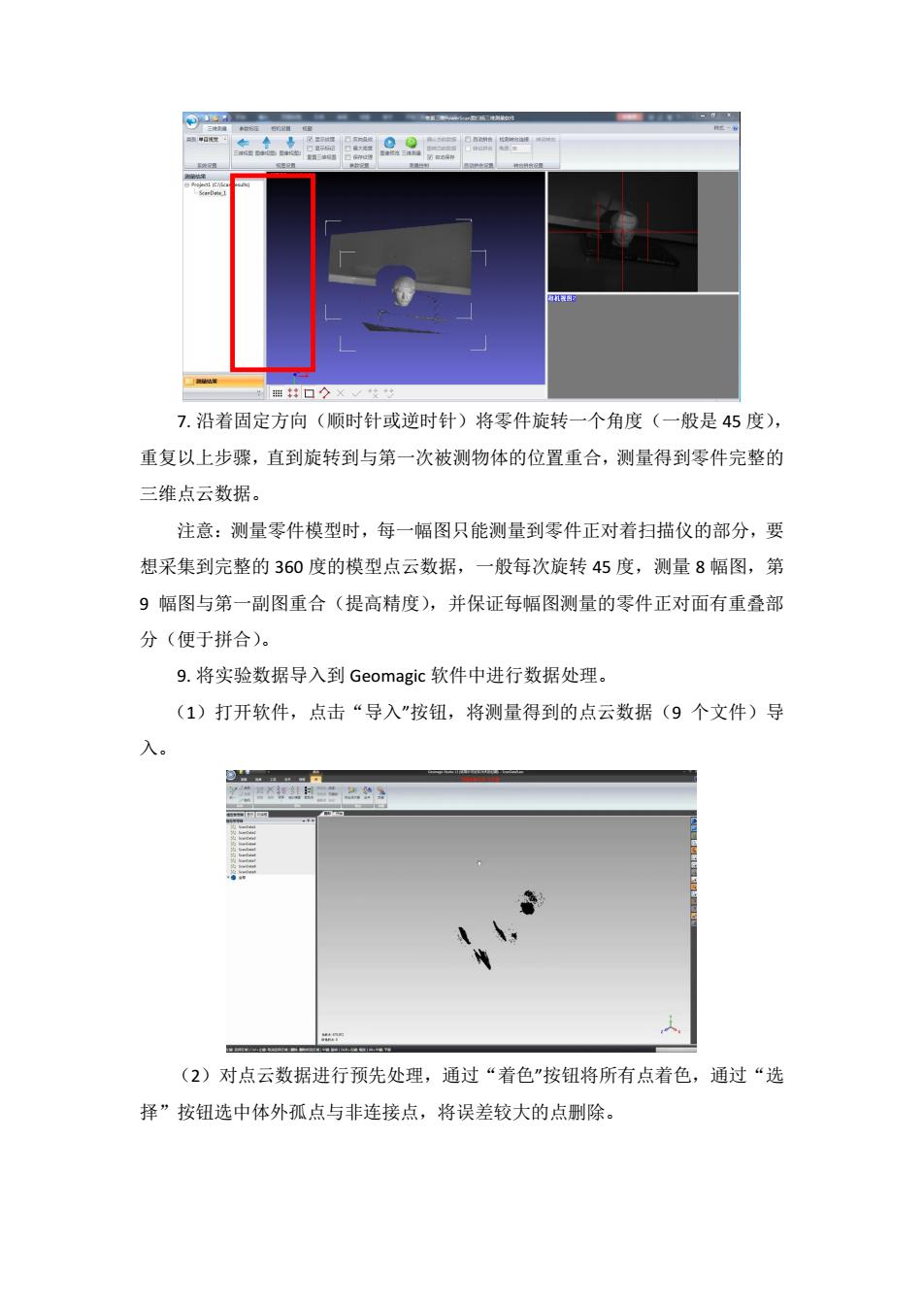
7.沿着固定方向(顺时针或逆时针)将零件旋转一个角度(一般是45度), 重复以上步骤,直到旋转到与第一次被测物体的位置重合,测量得到零件完整的 三维点云数据。 注意:测量零件模型时,每一幅图只能测量到零件正对着扫描仪的部分,要 想采集到完整的360度的模型点云数据,一般每次旋转45度,测量8幅图,第 9幅图与第一副图重合(提高精度),并保证每幅图测量的零件正对面有重叠部 分(便于拼合)。 9.将实验数据导入到Geomagic软件中进行数据处理。 (1)打开软件,点击“导入“按钮,将测量得到的点云数据(9个文件)导 入。 (2)对点云数据进行预先处理,通过“着色”按钮将所有点着色,通过“选 择”按钮选中体外孤点与非连接点,将误差较大的点删除
7. 沿着固定方向(顺时针或逆时针)将零件旋转一个角度(一般是 45 度), 重复以上步骤,直到旋转到与第一次被测物体的位置重合,测量得到零件完整的 三维点云数据。 注意:测量零件模型时,每一幅图只能测量到零件正对着扫描仪的部分,要 想采集到完整的 360 度的模型点云数据,一般每次旋转 45 度,测量 8 幅图,第 9 幅图与第一副图重合(提高精度),并保证每幅图测量的零件正对面有重叠部 分(便于拼合)。 9. 将实验数据导入到 Geomagic 软件中进行数据处理。 (1)打开软件,点击“导入”按钮,将测量得到的点云数据(9 个文件)导 入。 (2)对点云数据进行预先处理,通过“着色”按钮将所有点着色,通过“选 择”按钮选中体外孤点与非连接点,将误差较大的点删除