《快速成型与快速制模综合实验》实验讲义 实验1产品的三维造型与反求(4学时) 一、实验理论 1.传统的设计过程(正向工程),是根据产品的功能和用途首先进行概念设计 然后通过CAD输出产品的设计图纸,经审查无误后,编制NC代码并输入CN C加工设备进行产品加工或者通过快速成型机制作样品。图示如下: 、满庶 产品功能设计 图纸 检查 随黯 CAD模型 不满 图1正向工程 2.反求工程是从一已经存在的零件或产品模型入手,首先对其进行数字化测 量,得到它的轮廓坐标值,然后通过三维CAD曲面重构得到其三维CAD模型 并输出图纸,经审查合格后由CNC加工设备或快速成型机进行加工。图示如下: 入满意图纸 最终 已存在零件零件数字化,CD模型<检查>》 通 事不满意 图2反求工程 3.反求工程的应用 (1)在没有原始设计CAD模型和没有设计图纸的情况下,在对事物进行 测量的基础上重构其CAD模型或进一步生成零件的设计图纸,并以此为 依据生成数控加工的NC代码或应用快速原型技术,加工复制出一个相同 的零件:图3为逆向复制1954款Silver--Arrow赛车过程: ①原型车经过14小时三维扫描 ②扫描后得到由9800万点构成的点云 ③利用点云数据由CAD软件进行处理
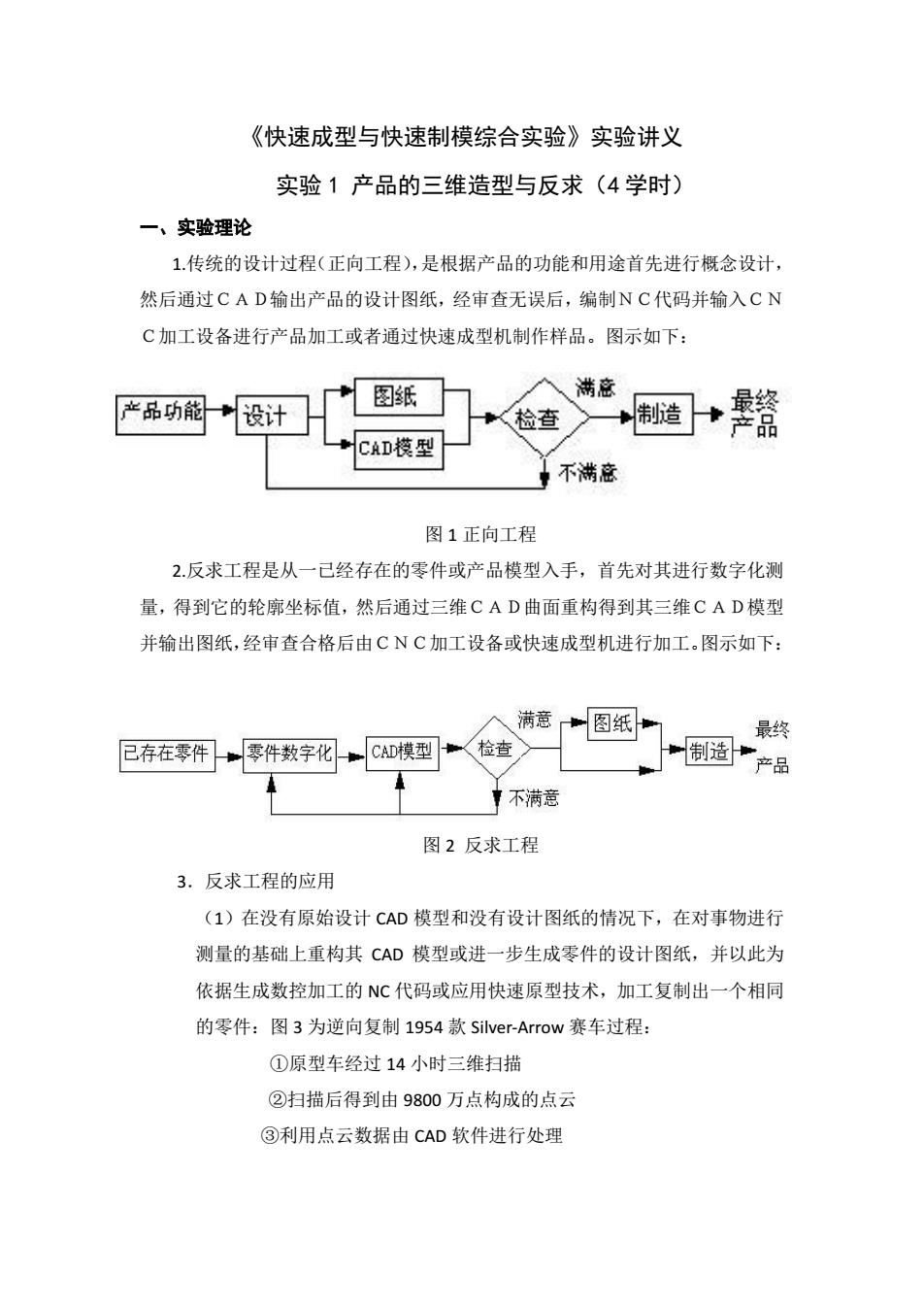
《快速成型与快速制模综合实验》实验讲义 实验 1 产品的三维造型与反求(4 学时) 一、实验理论 1.传统的设计过程(正向工程),是根据产品的功能和用途首先进行概念设计, 然后通过CAD输出产品的设计图纸,经审查无误后,编制NC代码并输入CN C加工设备进行产品加工或者通过快速成型机制作样品。图示如下: 图 1 正向工程 2.反求工程是从一已经存在的零件或产品模型入手,首先对其进行数字化测 量,得到它的轮廓坐标值,然后通过三维CAD曲面重构得到其三维CAD模型 并输出图纸,经审查合格后由CNC加工设备或快速成型机进行加工。图示如下: 图 2 反求工程 3.反求工程的应用 (1)在没有原始设计 CAD 模型和没有设计图纸的情况下,在对事物进行 测量的基础上重构其 CAD 模型或进一步生成零件的设计图纸,并以此为 依据生成数控加工的 NC 代码或应用快速原型技术,加工复制出一个相同 的零件:图 3 为逆向复制 1954 款 Silver-Arrow 赛车过程: ①原型车经过 14 小时三维扫描 ②扫描后得到由 9800 万点构成的点云 ③利用点云数据由 CAD 软件进行处理
④80小时工作时间的创建CAD模型 ⑤逆向复制出的仿制品实车。 图3赛车反求过程 图4为丰田花冠和国内某自主品牌汽车(仿制) F0 图4小车外形反求
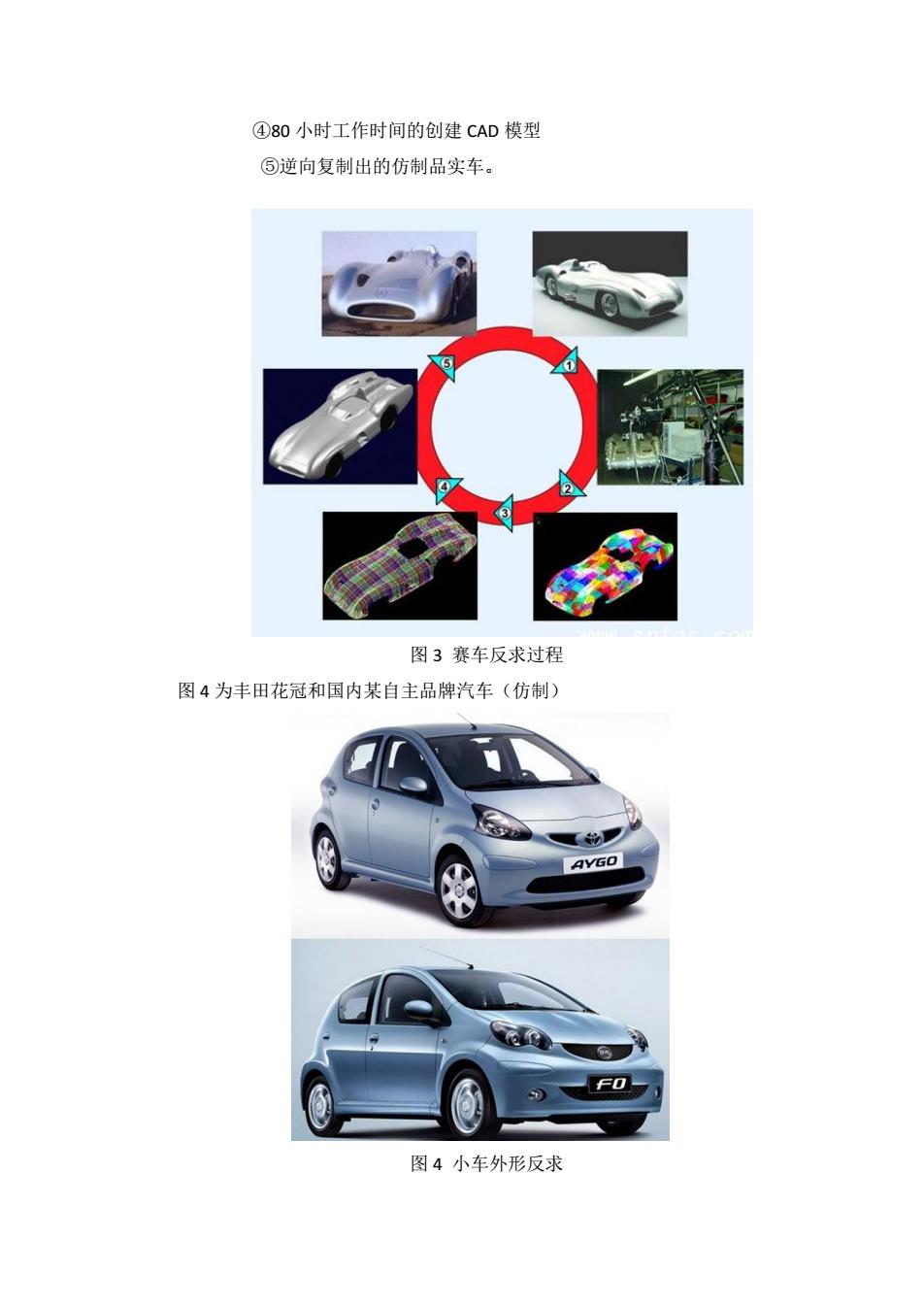
④80 小时工作时间的创建 CAD 模型 ⑤逆向复制出的仿制品实车。 图 3 赛车反求过程 图 4 为丰田花冠和国内某自主品牌汽车(仿制) 图 4 小车外形反求
(2)在新产品的开发中,当设计需要通过外观美学评估才能定型的工件 模型时,通常先制造出该产品的油泥模型或木质模型,然后对这个油泥模 型或木质模型应用反求工程获取该产品的CAD模型。 图4小车油泥模型 (3)在批量生产中,每个产品的外形都有细微的差异,通过反求工程建 三维测量点云数据 CAD三维设计原始数据 立的CAD模型,可以作为工业检测的重要依据:
(2)在新产品的开发中,当设计需要通过外观美学评估才能定型的工件 模型时,通常先制造出该产品的油泥模型或木质模型,然后对这个油泥模 型或木质模型应用反求工程获取该产品的 CAD 模型。 图 4 小车油泥模型 (3)在批量生产中,每个产品的外形都有细微的差异,通过反求工程建 立的 CAD 模型,可以作为工业检测的重要依据:

图5产品工业检测 (4)艺术品、考古文物等的修复和复制:
图 5 产品工业检测 (4)艺术品、考古文物等的修复和复制:
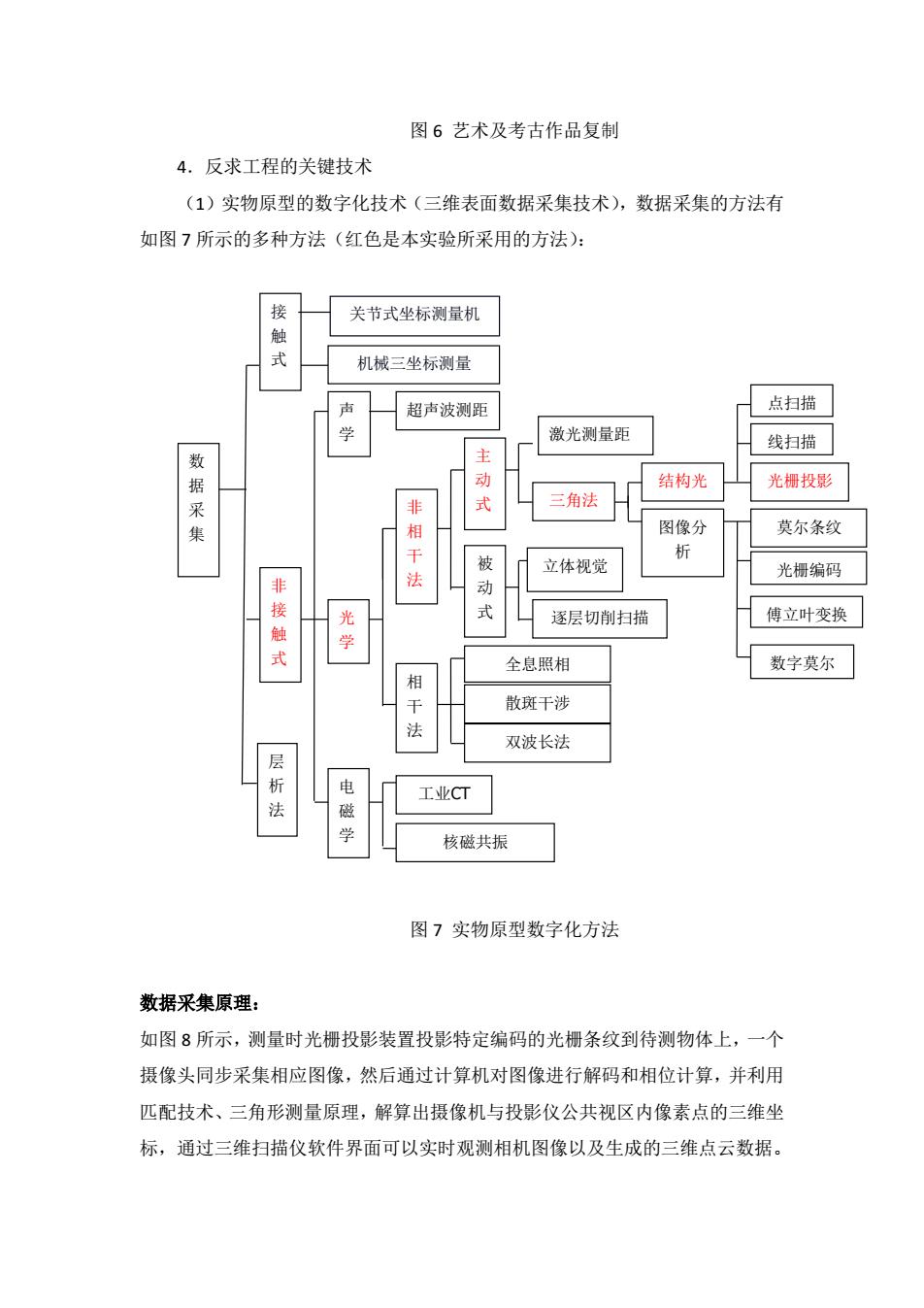
图6艺术及考古作品复制 4.反求工程的关键技术 (1)实物原型的数字化技术(三维表面数据采集技术),数据采集的方法有 如图7所示的多种方法(红色是本实验所采用的方法): 接 关节式坐标测量机 触 机械三坐标测量 超声波测距 点扫描 激光测量距 线扫描 主 数据采集 结构光 光栅投影 式 三角法 图像分 英尔条纹 立体视觉 光橱编码 逐层切削扫描 傅立叶变换 式 全息照相 数字莫尔 散斑干涉 双波长法 《 工业CT 法 核磁共振 图7实物原型数字化方法 数据采集原理: 如图8所示,测量时光栅投影装置投影特定编码的光栅条纹到待测物体上,一个 摄像头同步采集相应图像,然后通过计算机对图像进行解码和相位计算,并利用 匹配技术、三角形测量原理,解算出摄像机与投影仪公共视区内像素点的三维坐 标,通过三维扫描仪软件界面可以实时观测相机图像以及生成的三维点云数据
图 6 艺术及考古作品复制 4.反求工程的关键技术 (1)实物原型的数字化技术(三维表面数据采集技术),数据采集的方法有 如图 7 所示的多种方法(红色是本实验所采用的方法): 图 7 实物原型数字化方法 数据采集原理: 如图 8 所示,测量时光栅投影装置投影特定编码的光栅条纹到待测物体上,一个 摄像头同步采集相应图像,然后通过计算机对图像进行解码和相位计算,并利用 匹配技术、三角形测量原理,解算出摄像机与投影仪公共视区内像素点的三维坐 标,通过三维扫描仪软件界面可以实时观测相机图像以及生成的三维点云数据。 数 据 采 集 接 触 式 非 接 触 式 光 学 非 相 干 法 相 干 法 主 动 式 激光测量距 三角法 结构光 光栅投影 图像分 析 线扫描 点扫描 莫尔条纹 被 光栅编码 动 式 立体视觉 逐层切削扫描 全息照相 散斑干涉 双波长法 电 磁 学 工业CT 核磁共振 声 学 超声波测距 机械三坐标测量 层 析 法 关节式坐标测量机 傅立叶变换 数字莫尔